Способ статической балансировки гребных винтов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 996882
Автор: Лишин
Текст
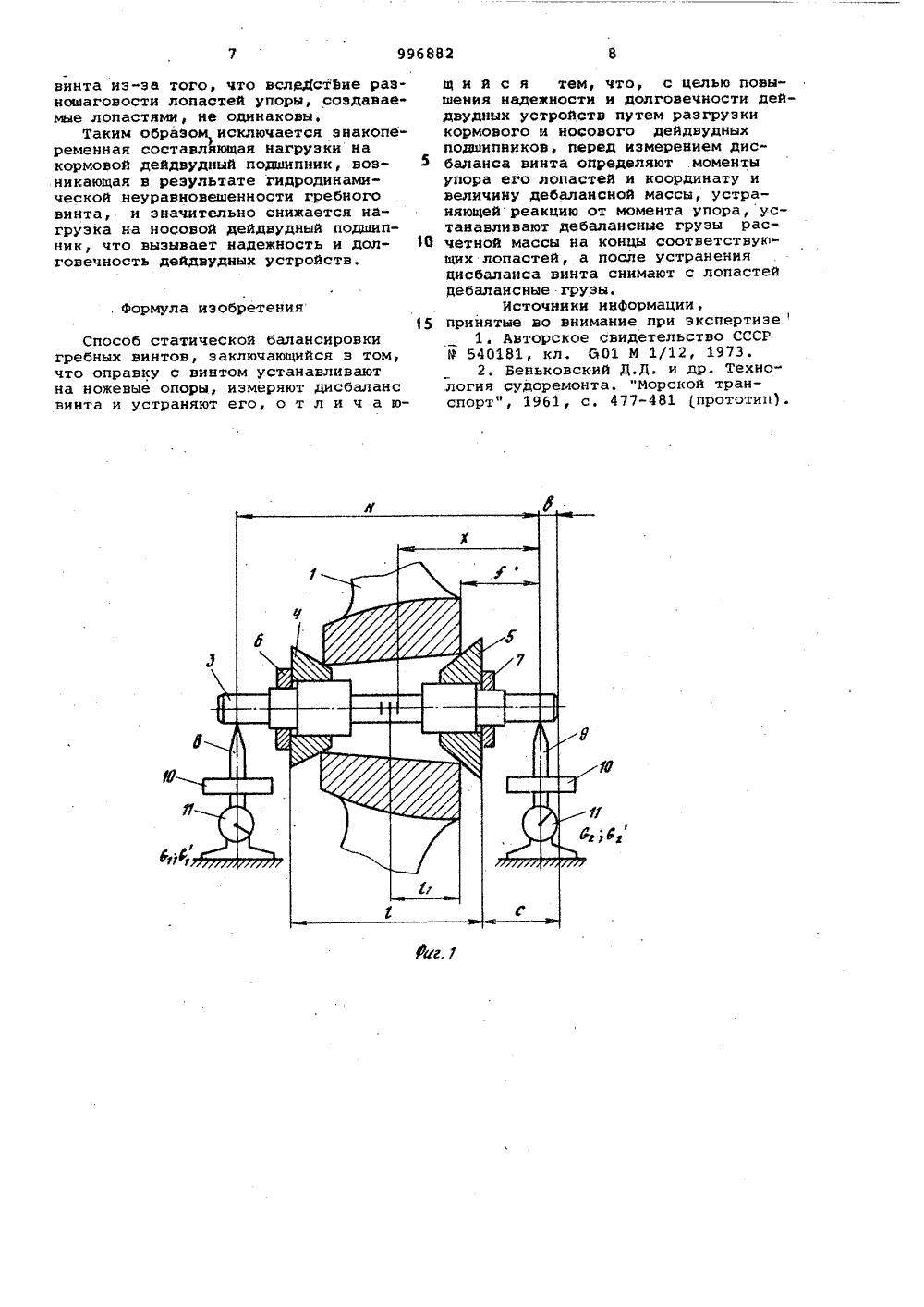
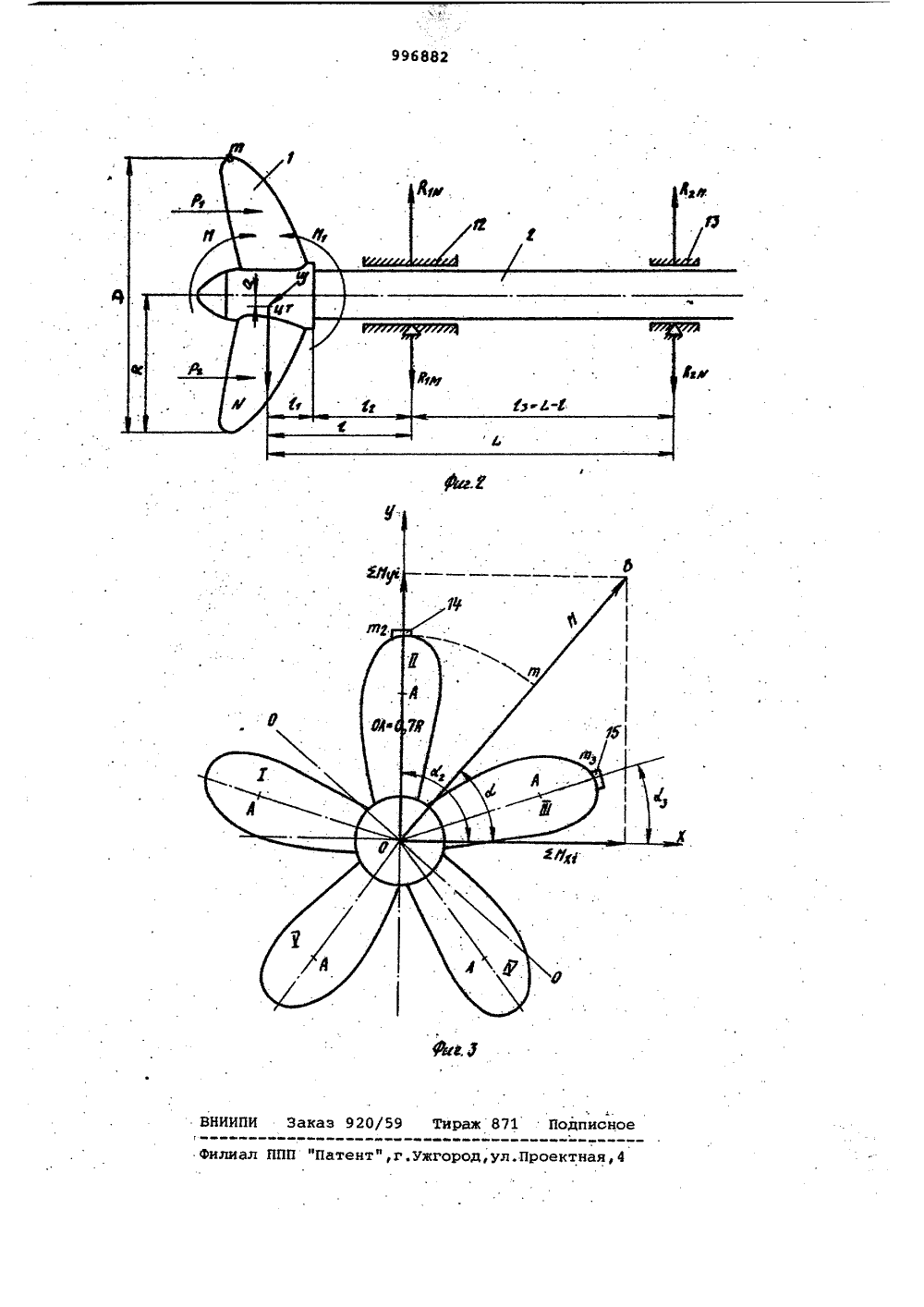
и 1996882 ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскихСоциалистическихРеспублик(61) Дополнительное к авт. свид-ву(22) Заявлено 310781 (21) 3324523/25-28с присоединением заявки М(23) ПриоритетОпубликовано 1502.83. Бюллетень М 6Дата опубликования описания 15. 02. 83 РМ К з 601 М 1/12 Государственный комитет СССР ио делам изобретенийи открытий531 УДК 620.1.05: 4531.24088.8 у 54) СПОСОБ СТАТИЧЕСКСИ БАЛАНСИРОВКИ ГРЕБНЫХ ВИНТОВНаиболе сущности к соб статич ных винтов что оправк на ножевые ,ланс винта Изобретение относится к балансировочной технике и может быть применено в судостроении при изготовлении в ремонте гребных винтов.Известен способ статической балан сировки гребных винтов, заключающийся в том, что винт устанавливают на аэростатическую шайбу, размещенную на центрирующем шпинделе, центрируют гребной винт относительно центрирую- щего шпинделя, в полость аэростатической шайбы подают сжатый воздух, который создает подъемную силу, урав новешивающую массу гребного винта, в результате чего аэростатическая шайба с гребным винтом имеет возможность перемещаться и поворачиваться в горизонтальной плоскости, после чего определяют дисбаланс винта, который устраняют удалением неуравновешенной массы с лопасти винблизким по технической изобретению является спо ской балансировки гребзаключающийся в том, с винтом устанавливают опоры, измеряют дисбаи устраняют его снятием ли добавлением металла на ступицуинта (2. Недостатком способов являетсято, что они не учитывают разношаговость лопастей, вызывающую гидродинамическую неуравновешенность гребного винта, которая обусловливаетвозникновение знакопеременных нагрузок на подшипники дейдвудного устройства, главным образом иа кормовой дейдвудный подшипник, в связис тем,что при различной величине шагалопастей равнодействующая создаваемого ими упора не совпадает с осьювинта, сместившись от нее в стОронулопастей, имеющих наибольший шаг,на некоторое расстояние, котороеявляется плечом этой равнодействующей относительно оси, перпендикулярной оси винта и плоскости осевогосечения винта, в которой произошлоэто смещение. Произведение величины равнодействующей ( силы упора) на 25 это плечо дает момент, изгибающийгребной вал и вызывающий опорныереакции дейдвудных подшипников, создающих реактивный момент, равныйпо величине моменту силы упора и З 0 обратный ему по знаку.Встояние от опоры 9 до правого торца ступ ицы.Определив расстояние К - расстояние ЦТ винта от правого торца, замерами с места или по чертежу валопровода определяют расстояние 8 от плоскости переднего торца ступицы винта до середины кормового дейдвудного подшипника 12, а также расстояние 1 между серединами кормового дейдвудного подшипника 12 и носо вого дейдвудного подшипника 13, а также расстояние , от ЦТ винта 1 до середины носового дейдвудного подшипника 13.После этого приступают к стати ческой балансировке гребного винта, для чего определяют общую условную дебалансную массув по формуле М - . .М23 Ы20 где Ь - общая условная дебаланснаямасса, приложенная на радиусе К винта 1;М - момент суммарного упора .всех лопастей относительнооси, перпендикулярной осивинта и плоскости действияэтого момента - оси 00 ф; - диаметр гребного винта .1;. и - частота вращения гребноговинта 1.Эта формула выведена следующим образом.Допустим, что у гребного винта 1 (для простоты возьмем двухлопастный 35 винт). - шаг лопастей составляет Н и Н, причем Н, 7 Н.При вращений винта 1 эти лопасти создают упоры Р и Р, и для рассматриваемого случая (т.е. Н 1 Н) 40 Р Р, Как известно, упоры у лопастей винтов фиксированного шага при-. лагаются на расстоянии 0,7 В от оси винта (в точках А). Разйость упоров. (их геометрическая сумма) создает на этом плече момент суммарного упора лопастей относительно оси, перпендикулярной оси винта и плоскости действия этого момента (в данном слу чае, плоскости чертежа).Для компенсации воздействия этого момента (гидродинамической составляющей нагрузки) на дейдвудные подшипники 12 и 13 надо приложить к винту центробежную. силу й ., Ифгде Ср - масса винта,Ч - окружная скорость вращенияЦТ винта;д - ускорение свободного паде- б 0ння тела,а - величина смещения ЦТ винта-от оси вращения в результатедебаланса;и - частота вращения винта. б 5 Момент М суммарного упора создает нагрузку на .кормовой 12 и носовой 13 дейдвудные подшипники и реакции й(М) и й(М), причем максимальная часть нагрузки действует на кормовой подшипник. Разгрузить его можно реак цией от момента М, создаваемого центробежной силой 4,.вызванной искусственно созданным дебалансом винта 1.Момент И можно уравновесить моментом вК; где К- радиус винта, в - общая условная дебалансная масса, приложенная на радиусе винта К: т.е.,б а вК.Отсюда а=О 26 Подставляя это значение О.получают щ 1 1МСтКУДаМ щОпределив по этой формуле общуюусловную дебалансную массу в, приложенную на радиусе К винта, определяют дебалансные массы в,д и ИФ(см. Фиг. 3,. позиции 14 и 15 .Раскладывают общую услЬзную.массу в на систему координат,.длячего вертикальную ось (ось у) системы координат располагают по осилопасти, имеющей наибольший шаг.Дебалансные грузы 14 и 15 устанавливают на концы лопастей ипосле чего на этих же лопастях винта 1 устраняют материал; масса удаляемого материала соответствуетмассе в, что обеспечивает уравновешивание винта 1 с дебалансными Грузами 14 и 15, после этого снимают слопастей идебалансные грузы14 и 15, сообщая таким образомвинту 1 дебаланс, необходиыяй длятого, чтобы при вращении винта возникла центробежная сила й, раэгружающая дейдвудные подшипники 12 и 13.Причем кормовой дейдвудный подшипник12 полностью разгружается от знакопеременной составляющей, имеющейпричиной разношаговость винта 1. Нагрузка от этой составляющей носового подшипника 13 будет значительноуменьшена, вместе с тем носовой подшипник 13 является менее нагруженными, как правило, не определяет надежности и долговечности дейдвудногоустройства,При работе винта .сообщенный емуискусственный дебаланс смещает ЦТвинта от его оси, вследствие чегоот массы винта, приложенной с экс-,центриситетом относительно оси вращения, возникает центробежная сила.Момент этой силы компенсирует момент,возникающий от равнодействующей упоров, создаваемых лопастями, точкаприложения которой смещена от осивинта иэ"эа того, что всладстйие раз" нсшаговости лопастей упоры, создавае мые лопастями, не одинаковы.Таким образом исключается энакопеременная составляющая нагрузки на кормовой дейдвудный подшипник, возникающая в результате гидродинамической неуравновешенности гребного винта, и значительно снижается нагрузка на носовой дейдвудный подшипник, что вызывает надежность и дол говечность дейдвудных устройств,Формула изобретенияСпособ статической балансировкигребных винтов, заключающийся в том,что оправку с винтом устанавливаютна ножевые опоры, измеряют дисбалансвинта и устраняют его, о т л и ч а ющ и й с я тем, что, с целью повышения надежности и долговечности дейдвудных устройств путем разгрузкикормового и носового дейдвудныхподшипников, перед измерением дисбаланса винта определяют моментыупора его лопастей и координату ивеличину дебалансной массы, устраняющейреакцию от момента упора, устанавливают дебалансные грузы расчетной массы на концы соответствующих лопастей, а после устранениядисбаланса винта снимают с лопастейдебалансные грузы,Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССРР 540181, кл. 501 М 1/12, 19732, Беньковский Д,Д, и др. Техно"
СмотретьЗаявка
3324523, 31.07.1981
МУРМАНСКОЕ ОТДЕЛЕНИЕ ГОСУДАРСТВЕННОГО ПРОЕКТНО КОНСТРУКТОРСКОГО ИНСТИТУТА РЫБОПРОМЫСЛОВОГО ФЛОТА "ГИПРОРЫБФЛОТ"
ЛИШИН АНДРЕЙ БОРИСОВИЧ
МПК / Метки
МПК: G01M 1/12
Метки: балансировки, винтов, гребных, статической
Опубликовано: 15.02.1983
Код ссылки
<a href="https://patents.su/5-996882-sposob-staticheskojj-balansirovki-grebnykh-vintov.html" target="_blank" rel="follow" title="База патентов СССР">Способ статической балансировки гребных винтов</a>
Установка для правки лопастей гребных или воздушных винтов

Номер патента: 305000
Опубликовано: 01.01.1971
Авторы: Боровков, Горьковский, Кулик
МПК: B21D 3/10
Метки: винтов, воздушных, гребных, лопастей, правки
...выбитыми на нижней рабочей плите штампа Удаление от оси винта,На транспортирующем устройстве подвигают каретку до совпадения указательной стрелки каретки с делением шкалы суппорта в соответствии с данными, выбитыми на нижней плите штампа Поперечная подача.С помощью ходового винта подвигают суппорт транспортирующего устройства в сторону штампа до совпадения указательной стрелки суппорта с делением шкалы на параллелях в соответствии с данными, выбитыми на никней рабочей плите штампа Продольная подача, Эта операция может быть выполнена лишь совместно с подьемом и поворотом винта, а также опусканием верхней плиты штампа вниз,При продольной подаче винта к штампу производят подъем винта в тех случаях, когда заводимая в штамп лопасть...
Устройство для восприятия упора на гребном валу

Номер патента: 358208
Опубликовано: 01.01.1972
Авторы: Башун, Золотухин, Карпов, Мамедов, Хвостов
МПК: B63H 23/34
Метки: валу, восприятия, гребном, упора
...мощности; нафиг. 3 - то же, к водометному движителюзначительной мощности.Устройство выполнено в виде гидроцилиндра 1, соосно смонтированного на гребномвалу 2, который опирается на подшипники 3и несет на себе гребной винт 4 (рабочее колесо) и поршень 5 гидроцилиндра 1.Возникающий при работе движителя упорчерез гребной вал 2 и поршень 5 передаетсярабочей жидкости, заключенной в напорнойполости силового гидроцилиндра 1, а далее -на корпус судна. Для восполнения утечекрабочей жидкости из напорной полости силового гидроцилиндра через зазор между вращающимся поршнем и корпусом гидроцилиндра рабочая жидкость подается в напорную по лость гидроцилиндра под необходимым давлением через напорный патрубок б. Отвод утечек осуществляется через...
Способ снижения момента трения в трехколенном подшипнике качения

Номер патента: 148664
Опубликовано: 01.01.1962
Автор: Колотенков
МПК: F16C 39/06
Метки: качения, момента, подшипнике, снижения, трения, трехколенном
...подшипника, будут по своей природе аналогичными силам трения в обычном трехколечном подшипнике. При вращении промежуточного кольца подшипника только в одном направлении силами трения внутреннее кольцо, а следовательно, и ось прибора, будут увлекаться в направлении вращения промежуточного кольца.Рассмотрим случай, когда сепаратор несколько заторможен 1 фиг. 2). Сила трения Мь возникающая между шариком и внутренним кольцом, действует в направлении вращения промежуточного кольца.Сила Т 1 - тормозящее действие сепаратора на шарик, направлсНа В СтОрОНу, ПРОтИВОПОЛОКНу 1 С дсйСтВИЮ СИЛЬ 1 Мк СИЛа Т (ПрИЛОжЕН- ная по центру шара) вызывает крутящий момент вокруг точки Л, ко148664 торый приводит к возникновению силы 0,5 Ть в точке О касания шара...
Способ балластировки трубопровода с произвольным очертанием оси в горизонтальной плоскости на болоте

Номер патента: 1820131
Опубликовано: 07.06.1993
Авторы: Богушевская, Димов, Сумароков
МПК: F16L 1/028
Метки: балластировки, болоте, горизонтальной, оси, очертанием, плоскости, произвольным, трубопровода
...перепад 58 С и показана на 10 рисунке. Как следует из расчета, есть два участка с максимальной величиной поперечных перемещений в противоположные от оси трубы стороны: первый - с центром в точке 8 (Оз=б 1 см), слева и справа от точки 8 15 величина перемещений уменьшается до нуля в точке 11 и за пределами точки 1. Второй с центром в точке 19 (О 1 э=81 см), для которого перемещения равны нулю в точке 11 и на другой половине компенсатора за преде лами оси симметрии, На обоих этих участках балластировку следует производить с переменным шагом, нарастающим от точек 8 и 19 слева и справа от них до сечений, где О=О. Величину Р - расчетное сопротивле ние основания поперечному перемещению трубы по.горизонтали вычисляют из равенства:=0,31...
Устройство для измерения осевого усилия и крутящего момента на валу гребного винта

Номер патента: 468114
Опубликовано: 25.04.1975
Автор: Осипов
МПК: G01L 1/08
Метки: валу, винта, гребного, крутящего, момента, осевого, усилия
...ему, Чувствительныйэлемент имеет достаточно большую поперечную жесткость, которая к тому же может регулироваться соответствующим выбором поперечного сечения колец и их количест ва, Относительное смещение втулки и валапреобразуется в частотно-модулированный,электрический сигнал дифференциальныминдуктивным преобразовательным элементом, магнитные системы 11 которого размешены внутри пружины 6,Измерительный преобразователь крутяшего момента расположен за ступицей вин-,та. Его чувствительный элемент 12 представляет собой полый цилиндр, выполненный за одно целое с валом. Магнитные системы дифференциально включенных генераторов размещены в диаметрально противоположных точках у одного из концов чувствительного элемента, при этом...
Предыдущий патент: Устройство для определения момента инерции тела спортсмена
Следующий патент: Способ балансировки зубчатых механизмов
Случайный патент: Пустотообразователь