Система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 714350
Авторы: Дворниченко, Палиенко, Шумеляк

Текст
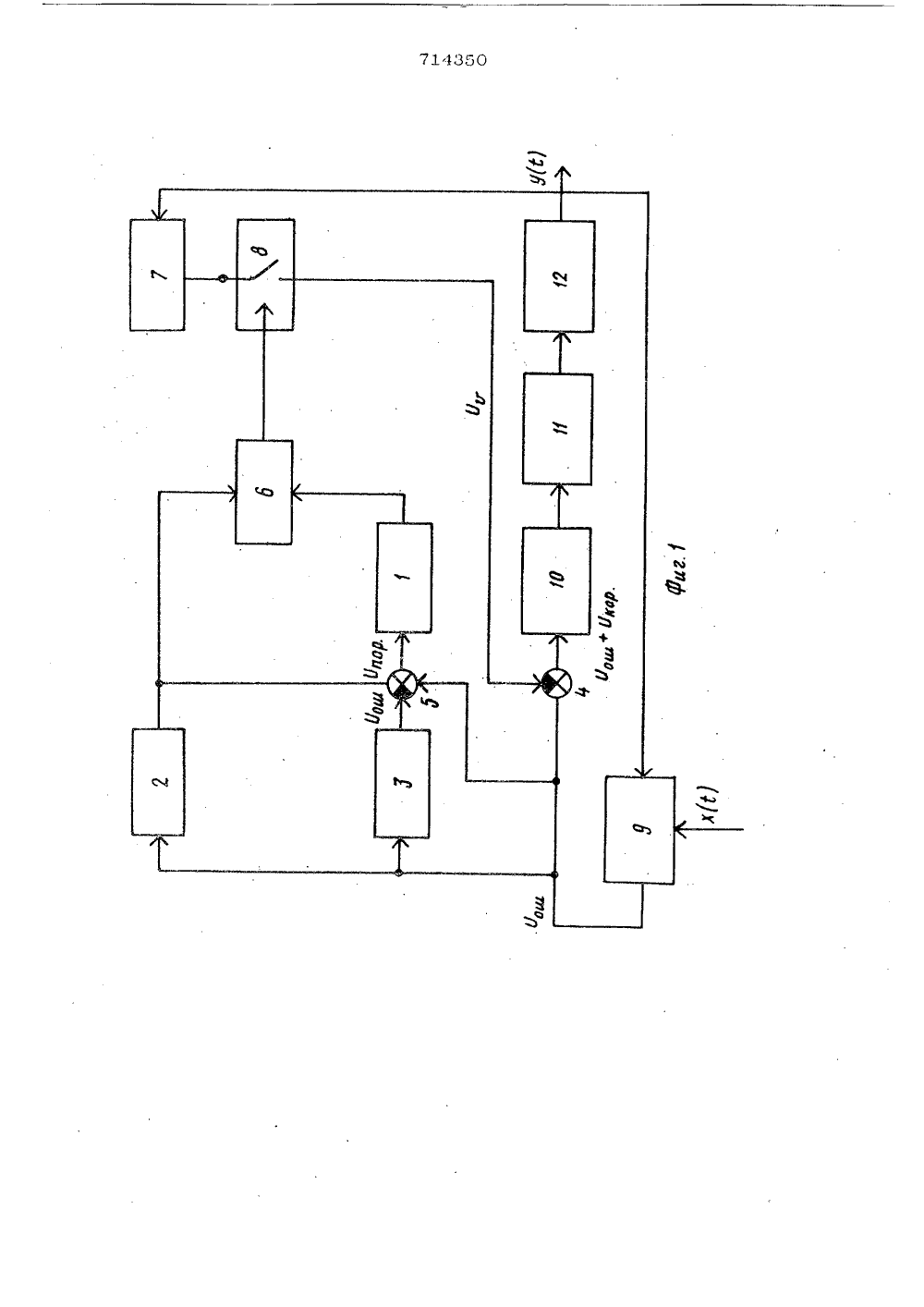
Союз Советски кСоцнапнстнческнкРеспубики т, свид-вуОпубликовано 05,02.80, Бюллетен ата опубликования описаниС Шумеляк 1) Заявитель 4) СИСТЕМА УП И 1Изобретение относится к облтоматики и может нвйти широкоение при построении вьсокоточнь 1щих систем.Известны системы упрввленирых имеются корректирующие устпредназначенные для коррекцииного процесса при скачкообрвэнни шибки 11,подключен к управляющему входу ключа21,Недостатком известной системы является то, что в ней принципиально отсутствует возможность устранения перерегулирования, а время переходного процессасистемы остается значительным ввиду того, что тормозящий сигнал с датчика скорости вводится беэ упреждения после того, квк сигнал рассогласования уже поменял свой знак (т.е. с опозданием). Прибольших скачкообразных изменениях сигнала рассогласования известная системаотрабатывает их с постоянной скоростьюпри насыщении усилительных каскадов(кроме участков разгона и торможения).Бель изобретения - устранение перерегулирования и уменьшение времени переходного процесса при скачкообразномизменении ошибки,Поставленная цель достигается тем,что в систему введвторой сумматор, иорганы, при этом вь переходом изменеи оИ вктеризуютсятО и не обеспе- перерегулиростемы хревли звцистранен эвестные сижностью приу лизкой по технической сущженному изобретению явля- содержащая измеритель я, выход которого через" о соединенные первый сумль и исполнительный мехао входом объекта регулиро- В скорости объекта регулирооторого через ключ подсое у первого сумматора, вналиигнвлов, выход которого д з чивают полногования.Наиболее бности к предлоется система,рвссогласоввнипоследоввтельнматор, усилитенизм связан сввния, датчикввния, выход кинеи ко входвтор знаков с 6 ) Дополнительное к а22) Заявлено 23.04.7 6присоединением заяви23) Приоритетен дифференцивтор,ервый и второй нульход измерителя рвс3 7143 согласования соединен со входами дифференциятора и второго нуль-оргеня, выходы первого и второго нуль-оргвнов подключены ко входам анализаторе энеков, входы второго сумматоре соединены с выходами измерителя рассогласования, дифференциатора и второго нуль-органе, а выход - со входом первого нуль-оргвня.Функциональная схеме предложенной системы предстввленв на фиг, 1, времен О ные диаграммы, иллюстрирующие работу системы, представлены ня фиг. 2. Системе содержит первый и второй нудь-органы 1, 2, дифференциетор 3, первый и второй сумматоры 4, 5, анализатор зне ков 6, датчик скорости 7, ключ 8, измеритель рвссоглесоввния 9, усилитель 10, исполнительный мехвнизм 11, объект регулирования 12, На фиг, 2 обозначены: Ощ сигнвд ошибкиф Цоц - сигнал про20 иэводной от ошибки Опор эталонный пороговый сигнал; О - сигнал скорости; О ; - корректирукзпий сигнал; 11 - момент изменения знака сигнала производной от ошибки;- момент равенства сигне ма производной. от ошибки сигналу ошибки и ПОроГОвому сигнелуфСистема рвбответ следующим образом.При отработке медленно меняющихся управляющих сигналов в установившемся ЗО режиме следящая системе работает кяк линейная системе с малой скоростной сшибкой. 5 О 4Сигнал ня выходе дифференциатора 3(Ооа) при этом имеет форму, показаннуюнефиг, 2, б,Тяк кяк в моменты времени от О до1 знак указанного сигнала и соответственно знак сигнале ня выходе нуль-органа 1 щюдолжяет соответствовать знакусигналя 5 на выходе нуль-органа 2 тоключ 8 остается закрытым и системапри отработке сигнала ошибки рязгоняе-.ся по предельной кривой. Несмотря ня то,что в момент времени 1 сигнал ня выходе дифференциаторв 3 меняет знак, знаксигнала нв выходе суммвторя 5 не меняется, тяк квк сигнал ошибки Осы превышает по абсолютной величине сигнел ОоНя фиг, 2, а счгнеды Ц и Цп понорказаны с обратным знаком, Система отрабатывает сигнал ошибки по предельнойкривой (с максимальной 1 скоростью).В момент времени С сигнал ошибкисравнивается по величине с сигналом нявыходе дифференцияторв 3, знак сигналанв выходе сумматоре 5, я следовательно,и не выходе нуль-органа 1 меняется.Ввиду несоответствия знаков нв входех анализатора знаков 6 на его выходе начиняет формироваться импульс упрявлякю егосигнала ( Опо не фиг. 2, в), открывающий ключ 8. Сигнал обратной связи сдатчика скорости 7 начиняет вводитьсячерез сумматор 4 в усилительный трактсистемыВеличине сигнала производной от ошиб- з 5 ки тощ т.е, сигнал нв выходе дифференаиетора 3 близок к нулю и не превышает установленного порогового значения О пор) которое задается суммированием в необходимом масштабе сигнала с выхода нуль40 оргвна 2, определяющего знак сигнала ошибки и сигнала ошибки, Поэтому знак сагналов на выходе сумматора 5 и нуль- органа 1 соответствует знаку сигнала ня выходе нуль органа 2. При этом управляющий сигнал на выходе анализаторе знаков 6 отсутствует, ключ 8 закрыт и сигнвл скоростной обратной связи не подается нв вход сумматора 4, Выходной сигнал сумматора 8 соответствует входному сиг 50 неду ошибки.При появлении на входе системы задающего сигнала, вызывающего скачкообразное, ступенчатое изменение ошибки, систе 55 мя отрябвтывяет его с максимальной скоростью, установившейСя после участке разгона двигвтеля (см. фиг. 2, я, г моменты времени от О до 1 ). Величине и коэффициент суммированиякорректирующего сигнала (фиг. 2, д) выбираются достеточно большими по сравнению с величиной и коэффициентом суммирования сигнала ошибки. Поэтому в момент времени 1 сигнал ня выходе сумматора 4 меняет знак на противоположный, соответственно знаку корректирующего сигнале. Зв счет создения режиме противовключения путем подключения глубокой жесткой обратной связи в моментначинается интенсивное торможение в системе (учесток Ф,- нв фиг. 2).При этом одновременно со снижением скорости и продолжающимся уменьшением сигнала ошибки происходит уменьшение сигналя не выходе дифференциаторя 3,Момент включения жесткой обратной связи выбирается исходя из того, чтобы при снижении ошибки до нулевого или установившегося значения скорость в системе успела уменьшится до нулевой или установившейся и чтобы время торможения в системе было минимальным.7143 В ревльной системе момент включения1 зввисит от ее пврвметров (моментовнагрузки и инерции, редукции, постояннойвремени усилителя и исполнительногомеханизме) и выбирвется ссовстствукбуцим месштвбу суммироввния текущих значений сигнелов Ре Входах сумметорвПРи этом поРоговый сигнел О Г 1 ор,подввеемый нв сумматор 5 с выхода нульоргана Ь, мало влияет не время включеция 10тормоз 1 цего сигнала тек кек суммируется с очень малым коэффициентом, в реальных системвх в 50-Ь 00 рвз меньшйм,чем другие сигнвпы. В момент времениъкогде скорость и ошибка принимают ус теновившееся значение, сигнал нв выходедифференцивторе 3 ствновится близким кнулю, и следовательно, меньше порогового сигнеле звдвваемого с выхода нульоргене Ь, С этого момента знак сигнала 20не выходе сумматора 5 сновв меняетсянв первоначальный и ключ 8 зекрыввется.Зе счет того, что пороговый сигналзадватся с выходе нуль-органе Ь, егосигнвл оказывается евтометическн синхронизированным со знаком снгнеле ошибки.Кек видно иэ вышеизложенного, в системе введене ввтометическея зевиснмостьначала торможения от величины сигналапроизводной от ощи 5 ки следовательно, отскорости отреботки системой задевшегосигнелв с одной стороны и от величиныскачкообразного кзменения ошибки - сдругойфМомент нечвлв коррекции переходногопроцессе ввтомвтически уствневливеетсятаким, чтобы при сннкении ошибки до нулевого (установившегося) значения скорость отработки системой задающего сиг 40нвлв уменьшилась до установившегосязнвчения, после .ого происходит отключение тормозящего сигнала скоростной обратной связи,В испытвнной следящей системе, звм 45кнутой по углу, зедеввлись скачки сигнвв ( олв ошибки в дивпезоне от 3 до 60При этом неблюделесь форме переходногопроцесса, представленная нв фиг, Ь,50Теким обрезом, в системе переходной процесс корректируется евтомвтяческой регулировкой времени воздействия тормозящего сигнелв скоростной обратной связи в эевисимости от величины сквчкообразного изменения ошибки и от скорости ее изменения. Формула изобретения Система упрввленяя, содержащая иэмеритсль рессоглесовення, выход которого через последовательно соединенные первый сумматор, усилитель и исполнитель Мй мехениэм связан со входом обьектв регулировения, датчик скорости объекте регулирования, выход которого через ключ подсоединен к входу первого сумметорв, анализатор знаков сигнвлов, выход которого подключен к управляющему входу ключе, о т л и ч е ю щ в я с я темчто, с целью устранения перерегулироввняя и уменьшения времени переходного процессе системы при сквчкообрвэном изменении ошибки, в систему введены дифференцивтор, второй сумматор, первый и второй нуль оргены при этом выход измерителя рвссоглеоевения соединен со входами диффе ренциеторе к второго нуль-органа, выходы первого и второго нуль-органов подключены ко входам внвлизвторе знаков входы второго сумматора соединены с выходами иэмернтеля рессоглвсоввния, дифференцивторе и второго нуль-оргвнв, в выходсо входом первого нуль-оргвнв. Источники информации,принятые во внимание при экспертизе1, Нелннейные корректирующие устройства в системах автоматического управления, под ред, Топчеевв М., Машиностроение", 1971, с. 106-11 Ь. Ь Хлыпвло Ес И. Нелинейные корректирующие устройства в автоматических системех, М., Энергия", 1973, с 89, рис. Ь(прототип).714350 Составитель Ю Глвдковв Техред .М. Петко Корректор Т. Скворцовазу Зека Филиал ППП "Патентф, г, Ужгород, ул. Проектная,86/44 ЦНИИ по 113035Тираж. 956ПИ Государственного елвм иэобретений Москнв, Ж, Р Подписноекомитета СССРоткрытийшсквы наб., д. 4/
СмотретьЗаявка
2353243, 23.04.1976
ПРЕДПРИЯТИЕ ПЯ В-8117
ДВОРНИЧЕНКО АНАТОЛИЙ ЮРЬЕВИЧ, ПАЛИЕНКО ГРИГОРИЙ ГРИГОРЬЕВИЧ, ШУМЕЛЯК ЛЕОНИД СИДОРОВИЧ
МПК / Метки
МПК: G05B 11/01
Метки:
Опубликовано: 05.02.1980
Код ссылки
<a href="https://patents.su/5-714350-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления</a>
Устройство для углового смещения нуль-сигнала сельсинных передач

Номер патента: 189904
Опубликовано: 01.01.1967
Авторы: Анценгрубер, Теи
МПК: G08C 19/08
Метки: нуль-сигнала, передач, сельсинных, смещения, углового
...осуществляется с регулировкой по амплитуде и фазе, например, от магнитного усилителя. Это позволяет получать сдвиг нуль-сигнала с высокой точностью на угол, пропорциональный управляющему напряжению,На фиг. 1 изображена схема предустройства (вариант); на фиг. 2 - гвисимости выходного напряжения сгла поворота су.Устройство включает два сельсина-датчика 1 и 2, сельсин-приемник 3 и магнитный усилитель 4, Фазовые обмотки сельсинов 2 подключены встречно обмоткам сельсинов 1 и 3. Роторы сельсинов 1 и 2 механически жестко соединены между собой со сдвигом в 60 относительно одноименных фазовых обмоток статоров,Электрический сигнал управлениступает на управляющую обмотк4, в результате чего изменяется афаза напряжения на обмоткесельсина...
Преобразователь дельта-модулированного сигнала в сигнал с импульсно-кодовой модуляцией

Номер патента: 1128385
Опубликовано: 07.12.1984
Авторы: Брунченко, Власюк, Охинченко
МПК: H03K 13/24
Метки: дельта-модулированного, импульсно-кодовой, модуляцией, сигнал, сигнала
...с шиной 3 синхронизации, выходы реверсивного счетчика 1 являются выходом 4 устрой ства, счетчик 5, первый и второй Р- триггеры 6 и 7, элемент 8 ИСКЛЮЧАЮЩЕЕ ИЛИ-НЕ, первый и второй логические блоки 9 и 10, причем шина 3 синхронизации соединена с входом счетчика 5 и входами синхронизации первого и второго 2 -триггеров 6 и 7, авыход старшего разряда реверсивногосчетчика 1 подключен к первому входупервого логического блока 9, к первому входу элемента 8 ИСКЛЮЧАЮЩЕЕИЛИ-НЕ и к входу первогоЮ -триггера6, выход которого соединен с вторымвходом элемента 8 ИСКЛЮЧАЮЩЕЕ ИЛИ-НЕ,выход которого подключен к входуустановки в "0" счетчика 5, а выходсчетчика 5 - к первому входу второгологического блока 10, выход которого соединен с 3 -входом второго...
Преобразователь дельта-модулированного сигнала в сигнал с импульсно-кодовой модуляцией

Номер патента: 1216831
Опубликовано: 07.03.1986
Авторы: Савельев, Строд, Хофмаркс
МПК: H03M 7/36
Метки: дельта-модулированного, импульсно-кодовой, модуляцией, сигнал, сигнала
...когда на первый вход анализатора 2 полярности поступает нулевая пачка импульсов при наличии высокого логического уровня на втором входе анализатора полярности), то сигналявляется инверсным по отношению к сигналу 3 . На втором выходе анализатора 2 полярности при этом присутствует высокий логический уровеньПоскольку в общем случае частоты дискретизации ДМ и ИКМ сигналов различны, то для формирования выходно 12168311, Преобразователь дельта-модулированного сигнала в сигнал с импульс но-кодовой модуляцией, содержащий реверсивный счетчик, блок управления и триггеры задержки, входы которых подключены к выходам соответствующих разрядов реверсивного счетчика, первый и второй входы которого соединены с соответствующими выходами блока...
Система телемеханики с временным разделением

Номер патента: 365726
Опубликовано: 01.01.1973
Автор: Чагров
МПК: G08C 15/10
Метки: временным, разделением, телемеханики
...разделении сигналов и более восьми - при кодо импульсной передаче сообщений в передаю3щем 1 и приемном 2 устройствах перед формирователями-распределителями б и 7 установлены трехфазные индукционные фазорасщепители 4 и 5.Трехфазные индукционные фазорасщепители 4 и 5 в приемном 2 и передающем 1 устройствах системы телемеханики преобразуют исходную трехфазную систему напряжения в фазовые системы напряжения с числом фаз, позволяющим с помощью логических элементов И за период исходного синхронизирую- щего напряжения формировать импульсные сигналы одной полярности в количестве, равном новому числу фаз, п=т)3.Трехфазный индукционный фазорасщепитель состоит из статора и ротора. На статоре размещена первичная трехфазная обмотка. На роторе...
Способ формирования трехуровневого управляющего сигнала в релейных системах управления динамическим объектом и релейный регулятор для механизации этого способа

Номер патента: 1777119
Опубликовано: 23.11.1992
Автор: Леденев
МПК: G05B 11/14
Метки: динамическим, механизации, объектом, регулятор, релейный, релейных, сигнала, системах, способа, трехуровневого, управляющего, формирования, этого
...и отпускэния 15 пятого релейного элемента 20, Рз = 1(Р= 1,В 5 = 1), Рз - выходной сигнал третьего элемента И 9 удерживает первый триггер 22 в нулевом состоянии, Р 4 = 0 (Р 4 = 1), Р 4 и Р 4 - соответственно прямой и инверсный выхо ды четвертого элемента И 10, Т 2 = 0 (Т 2 = 1),Т 2 и Т 2 - прямой и инверсный выходы второ-.го триггера 13, К 2 = О, К 2 - выходной сигнал второго ключа 19 равен нулю, так как этот ключ закрыт сигналом Т 2 = О. Вб = 1, Вв - 25 выходной сигнал шестого релейного элемента 21, йб = 1, так как К 2-д, - д - уровень срабатывания и отпускания шестого релейного элемента 21, Р 5 = 0 (Р 4 = 1, Во = 1), Р 5 - выходной сигнал пятого элемента 30 И 11, Рб = 0 (Т 1 = 1, Вз = 0), Рб - выходнойсигнал шестого элемента И...
Предыдущий патент: Регулятор
Следующий патент: Следящая система
Случайный патент: Штамм -2384, используемый для очистки промышленных сточных вод коксохимических производств от роданидов