Способ управления угловым положением космического аппарата при помощи инерционных исполнительных органов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1782221
Автор: Ануприенко

Текст
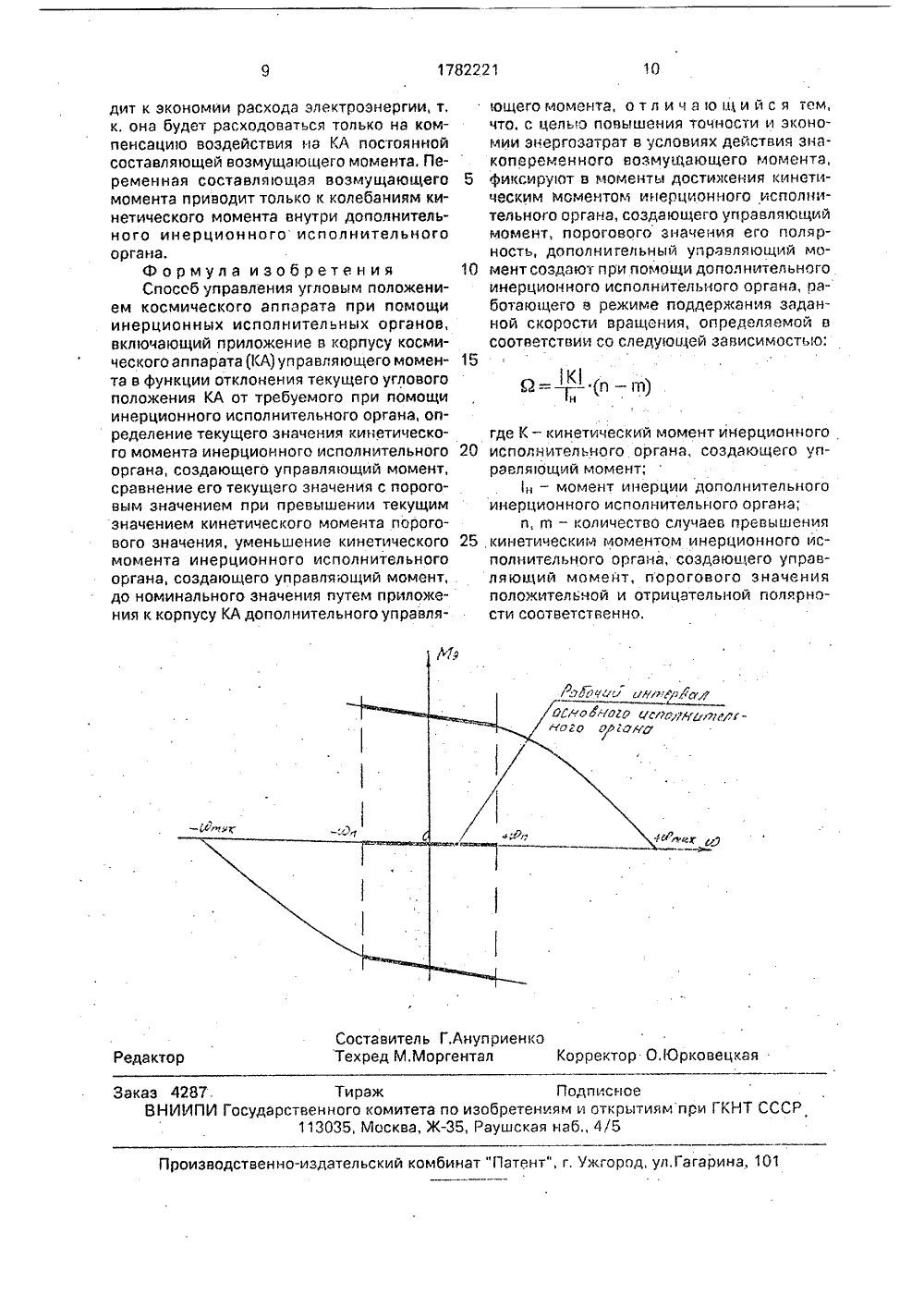
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК ГОСУДАРСТВЕННОЕ ПАТЕНТВЕДОМСТВО СССР(71) Киевский политехнический институт им.50-летия Великой Октябрьской социалистической революции(73) Киевский политехнический институт (56) Раушенбах Б,В., Токарь Е.Н. Управление ориентацией космических аппаратов. М.: Наука, 1974, с. 128-130.Алексеев К.Б. и Бебенин Г.Г, Управление космическими летательными аппарата- . ми. М.: Машиностроение, 1974, с. 218-225. (54) СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ПО-, ЛОЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА ПРИ ПОМОЩИ ИНЕРЦИОННЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ Изобретение относится к способам управления угловым положением космического аппарата и может быть использовано в прецизионных системах управления, исполнительными органами которых являются электромаховичные двигатели (ЭМД).Известны способы управления ориентацией в пространстве космических аппаратов (КА), в которых управляющие моменты создают с помощью реверсивных управля- ющих маховиков или ЭМД,В известных способам к корпусу КА прикладывают управляющий момент в функции отклонения текущего углового положения КА от требуемого при помощи инерционно)Ы 178222(57) Изобретение относится к способам управления угловым положением космического аппарата и может быть использовано а прецизионных системах управления, исполнительными органами которых являются электромаховичные двигатели, Целью изобретения является повышение точности и зкономии энергозатрат в условиях действия знакоперемен ного возмущающего момента. Поставленная цель достигается тем, что фиксируют в момент достижения кинетическим моментом инерционного исполнительного органа, создающего управляющий момент, порогового значения его полярность; дополнительный управляющий момент создают при помощи дополнительного инерционного исполнительного органа, работающего в режиме поддержания заданной скорости вращения, Д определяемой в соответствии с приведенной зависимостью. 1 ил,Ф а го исполнительного орган кущее значение кинети инерционного исполнител здающего управляющий м ют это текущее значен значением, при превыше чением кинетического мо значения уменьшают кин инерционного органа, соэ ющий момент, до номин путем приложения к кор тельного управляющего мИспользование инерц тельных органов вместо бенно эффективно при дли а, определяют теческого моментаьного органа, соомент, сравниваие с пороговым нии текущим знамента порогового етический момент дающего управляального значения пусу КА дополниомента.ионных исполниреактивнцх осотельных режимахориентации в условиях действия знакопеременного возмущающего момента, т. к, приэтом экономится рабочее тело для реактивных двигателей: рабочее тело тратится только на компенсацию действия постояннойсоставляющей возмущающего момента.Однако для получения Выш 8 указаннОГОположительного эффекта необходимо произВодить уменьшение кинетического моментаинерционного органа до номинального припомощи реактивных двигателей через интервалы времени Ту, кратные периоду изменения возмущающего момента Тв, т. е. Ту = КТв,где К - целое число. Период изменениявозмущающего момента Тв может бытьбольшим, например равным периоду обра щения КА вокруг планеты.Таким образом, недостатком известныхспОсобОВ яВляется то, что при их использо"вании необходимо производить уменьшение кинетического момента инерционногооргана через большие интервалы времени,а следовательно, необходимо предусмотреть большую величину порогового значениякинетического момента. Пороговое значениекинетического момента должно быть больше,чем амплитуда кинетического момента, вызванная действием переменной составляющей возмущающего момента, Этообстоятельство приводит к невозможностиобеспечения прецизионной орйектации КАиз-за нестабильности по времени моментной,характеристики исполнительного органа инеозможноси создания соль УГОДНО малоГО и салол угодно точноГО дозироВания управляющего момента.. ц известныхспособах с ГГбМоО 4 ьюинерционного исполнительного органа вь 1 полняют одновременно две Функции:оказывают управляющее воздействиена корпус КА;накапливают в нем кинетический момент из-за воздействия на корпус КА Внешних Возмущающих моментов, освобождаятаким образом корпус КА от ВышеуказанноГО кинетическОГО мОмента,Кинетический момент К, который накапливает инерциокный исполнительный орган,например ЭМД, в режиме прецизионной ориентации равенК3 Мвг 1огде- момент инерции маховика; в - скорость вращения маховика относительно корпуса КА абсолютным значением скОрости вращения корпуса КА в режиме прецизионной ориентации по сравнению с а можно пренебречь), Мв - внешний возмущающий момент; т - время.Несмотря на то, что внешние возмущающие моменты Мв, как правило, малы и имеют перисдическуо составляющую, из-за длительного времени работы амплитуды К, а следовательно, 3, может быть большой, Это требует использования ЭМД или с большимИли с большим инт 8 рвалОм рабочих скоростей + в, или с большими + вп одновременно. Большомусоответствует большой момент сопротивления вращению маховика Мс, который при выключенном ЭМД возмущает корпус КА. На большом интервалев увеличивается нестабильность моментной характеристики ЭМД, т, к.электродвигатели любого типа постоянноготока, асинхронные и даже гистерезисные) развивают оет, засй от сорос20. вращения их якоря или ротора. Кроме того,при больших в даже при малых размерах маховика ЗМД (малый ) увеличивается аэродинамическое сопротивление, а следовательно, и Мс Для возможности управления ориентацией необходимо, как минимум,чтобы электромагнитный момент Мэ ЭМД превосходил момент сопротивления вращению маховика Мт. к. Мс обычно больше, чем внешний возмущающий момент М Длянадежности можно допустить, чтобы Мэ2 МсТаким образом, из неравенства (2) следует, что минимальное значение управляющего момента, которое можно достичь, равно и колеблется в процессе управления в следующих пределах4 О Му= Мэ +Мс=(1+3)Мс.Р)Для Возможности обеспечения малыхэначекий управляющего момента Му и с малыми колебаниями по величине для прецизионного режима необходимо использовать45 ЗМД с малым моментом сопротивления, аследовательно, с малыми +й Но в этомслучае невозможна длительная работа, т. к.по мере накопления кинетического моментаК согласно выражению (1), в выйдет заБО пределы 4-в и необходимо будетчасто производить уменьшение накопленного кинетического момента К, растрачивая понапраснурабочеетело на усранение не постоянной, какэто разумно делать, а переменной составляю% щей кинетического момента, создаваемойдействием знакопеременного возмущаощегомом 8 нта,Целью изобретения является повыше-,ние точности управления угловым положением КА и экономии энергозатрат в условиях действия знакопеременного возмущающего момента.Поставленная цель достигается тем, что фиксируют в момент достижения кинетическим моментом инерционного исполнительного органа, создающего управляющий момент, порогового значения его полярность, дополнительный управляющий момент создают при помощи дополнительного инерционного исполнительного органа, работающего в режиме поддержания заданной скорости вращения, определяемой в соответствии со следующей зависимостьюИ --- (и - щ),К где К - пороговое значение кинетического момента инерционного исполнительного органа, создающего управляющий момент;1 н - момент инерции дополнительного инерционного исполнительного органа;п, а - количество случаев превышения кинетическим моментом инерционного исполнительного органа, создающего управляющий момент, порогового значения положительной и отрицательной полярности соответственно.На чертеже изображена моментная характеристика инерционного исполнительного органа, при этом аьх - скорость холостого хода или синхронная скорость, . йЬ - приемлемый для управления диапазон в в части стабильности электромагнитного момента Мэ и момента сопротивления вращению МсИзобретение выполняется следующим образом.С целью создания малого по величине управляющего момента выбирают инерционный исполнительный орган малой мощности с малым моментом. инерции 1, а следовательно, с малым моментом сопротивления вращению. Исходя из конфигурации моментной характеристики выбранного инерционного исполнительного органа, а также учитывая зависимость его момента сопротивления от скорости щ, определяют приемлемый рабочий диапазон скоростей + вп, так чтобы на этом диапазоне сохранялась требуемая зависимость электромагнитного момента Мэ от скорости, например, чтобы Мэ = сопз 1 с определенной степенью точности или крутопадающая характеристика для автоматического внесения в процесс управления элемента затухания колебаний.Вначале, когда накопленный КА кинетический К=11,1, управляюториен 4З 0 гдеКи = 1 ы и- пороговое значениекинетического момента инерционного исполнительного органа, создающего управляющий момент,Дополнительный момент Мд при измеЗ 5 нении скорости вращения дополнительногоинерционного исполнительного органа ра- вен Мд=1 н й,(5) 40где И - производная ат ЙДля того, чтобы этот дополнительнцймомент Мд не нарушил прецизионную ориентацию, он должен быть меньше, чем уп равляющий момент основного инерционногоисполнительного органа. Это условие достигается обеспечением соответствующей скорости изменения частоты питания, т. к,50 0 =С 1,где С - коэффициент пропорциональности,Й=О . (7)55 С учетом (7) иэ (5) допустимая скорость изменения частоты питания дополнительного инерционного исполнительного органа не должна превышать следующей величины тацией КА любым выбранным способом и при этом определяют К, измеряя и и умножая ее на известный измеренный на Земле момент инерции. Если с течением времени 5 из-за внешних возмущающих моментов накопленный кинетический момент станет равным К 1= Ь = 1 ип 1, то фиксируют его полярность (положительная или отрицательная) и создают дополнительный управля ющий момент при помощи дополнительногоинерционного исполнительного органа, Таким дополнительным инерционным исполнительным органом, например, может быть ЭМД гистерезисного типа, синхронная ско рость которого определяется частотой питания его обмоток. Дополнительный инерционный исполнительный орган может уже иметь большой момент инерции 1 н и большой диапазон рабочих скоростей й аъ, а 20 следовательно, большой момент сопротивления, Медленно изменяя частотупитания такого дополнительного инерционного исполнительного органа, добиваются того, .чтобы скорость вращения его маховика ста ла равной:1782221 авитель Г.Анупед М,Моргента нко рактор Техр л Корректор О, Юрковецкал аказ 4287. ВНИИПИ Г оерытиям при ГКНТ СССР Подптениям и оская наб., 4 Тиражрственного ко113035, Мо тета по изоб ва, Ж, Ра жгород, ул,Гагарина, 101 оизводственно-издательский комбинат "Патент дит к экономии расхода электроэнергии, т, к. она будет расходоваться только на компенсацию воздействия иа КА постоянной составляющей возмущающего момента. Переменная составляющая возмущающего момента приводит тольо к колебаниям кинетического момента внутри дополнительного инерционного исполнительного органа.Формула изобретения Способ управления угловым положением космического аппарата при помощи инерционных исполнительных органов, включающий приложение в корпусу космического аппарата(КА) управляющего момента в функции отклонения текущего углового положения КА от требуемого при помощи инерционного исполнительного органа, определение текущего значения кинетического момента инерционного исполнительного органа, создающего управляющий момент, сравнение его текущего значенил с пороговым значением при превышении текущим значением кинетического момента порогового значения, уменьшение кинетического момента инерционного исполнительного органа, создающего управляющий момент, до номинального значения путем приложения к корпусу КА дополнительногоуправляющего момента, о тп и ч а ю щ и й с я тем, что, с целью повышения точности и экономии энергозатрат в условилх действия знакопеременного возмущающего момента, 5 фиксируют в моменты достижения кинетическим моментом инерционного исполнительного органа, создающего управллющий момент, порогового значенил его полярность, дополнигельный управляющий мо мент создают при помощи дополнительногоинерционного исполнительного органа, работающего в режиме поддержания заданной скорости вращенил, определяемой в соответствии со следующей зависимостью: где К - кинетический момент инерционного 20 исполнительного органа, создающего управля ощий момент;1 н - момент инерции дополнительногоинерционного исполнительного органа;и, п 1 - количество случаев превышенил 25 кинетическим моментом инерционного исполнительного органа, создающего управляющий момент, порогового значения положительчой и отрицательной полярности соответственно,
СмотретьЗаявка
4872523, 31.07.1990
КИЕВСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. 50-ЛЕТИЯ ВЕЛИКОЙ ОКТЯБРЬСКОЙ СОЦИАЛИСТИЧЕСКОЙ РЕВОЛЮЦИИ
АНУПРИЕНКО ГЕННАДИЙ ЕФРЕМОВИЧ
МПК / Метки
МПК: B64G 1/24
Метки: аппарата, инерционных, исполнительных, космического, органов, положением, помощи, угловым
Опубликовано: 15.12.1992
Код ссылки
<a href="https://patents.su/5-1782221-sposob-upravleniya-uglovym-polozheniem-kosmicheskogo-apparata-pri-pomoshhi-inercionnykh-ispolnitelnykh-organov.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления угловым положением космического аппарата при помощи инерционных исполнительных органов</a>
Способ определения перемещения рабочего органа исполнительного механизма гидропривода

Номер патента: 1377497
Опубликовано: 28.02.1988
МПК: F15B 19/00
Метки: гидропривода, исполнительного, механизма, органа, перемещения, рабочего
...Москва, Ж, Раушская наб д,4/5ф.Производственно-полиграфическое предприятие, г,ужгород, ул,Проектная,4 Изобретение относится к машино-,.строению и может быть использовано всистемах автоматического управлениягидроприводами. Цель изобретения - повышение надежности при эксплуатации в условиях с повышенной вибрацией, влажностью, температурой. 30 Предлагаемый способ осуществляетсяследующим образом.115 При работе гидропривода измеряют расход, температуру и давление .в гид ролинии питания исполнительного механизма и по предварительно полученной зависимости перемещения рабочего ор гана исполнительного механизма от расхода в гидролинии питания при различных значениях температуры и давления рабочей жидкости определяют величину перемещения рабочего...
Устройство для автоматического управления инерционным объектом при ограниченном управляющем воздействии

Номер патента: 1084729
Опубликовано: 07.04.1984
Авторы: Карпов, Липатов, Половинчук
МПК: G05B 11/06
Метки: воздействии, инерционным, объектом, ограниченном, управляющем
...основной контур управления, образованный последовательно соединенными формирователем сигнала ошибки, усилителем-преобразователем обладающим насыщением, испол 35 нительным органом и объектом управления, выход которого соединен с вторым входом формирователя сигнала ошибки, и дополнительный контур, образованный последовательно соединен-, ными дифференциатором, первым ключом, первым релейным блоком и вторым релейным блоком, выход которого соединен с вторым входом усилителя-преобразователя и вторым входом первого клф фа Г 23Недостатком данного устройства является большое перерегулирование колебательность и время переходного процесса при значительной величине произведенной ошибки в момент выключе 50 ния форсирующего управления, что особенно...
Устройство фиксации подвижного исполнительного органа
Номер патента: 1137674
Опубликовано: 27.05.1996
МПК: B23Q 1/28
Метки: исполнительного, органа, подвижного, фиксации
1. Устройство фиксации подвижного исполнительного органа, содержащее упор, выполненный в виде трех жестких элементов, установленных в корпусе по направлению силового воздействия, первый из которых размещен с возможностью возвратно-поступательного движения в указанном направлении, а второй - шарнирно соединен с первым с возможностью поворота в одну сторону, отличающееся тем, что, с целью упрощения конструкции и повышения надежности, оно снабжено инерционной массой, установленной на втором элементе со стороны возможного поворота, первый элемент выполнен подпружиненным относительно корпуса, а третий элемент жестко закреплен в корпусе.2. Устройство по п.1, отличающееся тем, что оно снабжено моментным фиксатором, размещенным в корпусе с...
Устройство для защиты исполнительного органа с резервированием

Номер патента: 1675994
Опубликовано: 07.09.1991
Авторы: Гадяцкая, Гадяцкий, Улановский
МПК: H02H 3/08
Метки: защиты, исполнительного, органа, резервированием
...питания напряжение на его управляющем электроде равно нулю вследствие разряженного состояния конденсатора 9, Постоянная времени цепи второй резистор 7 - конденсатор 9 выбрана таким образом, что время роста напряжения на конденсаторе 9 при его заряде до значения открытия тиристора 2 больше, чем время открытия тиристора 1. После откры 5 10 15 20 25 30 35 40 45 50 тия тиристора 1 напряжение на конденсаторе 9 устанавливается недостаточным для открытия тиристора 2.При увеличении тока по какой-либо причине через исполнительный орган -(например, вследствие короткого замыкания в нем) сверх допустимого значения, произойдет расплавление плавкой вставки предохранителя 3. Это вызовет обрыв цепи питания исполнительного органа 4 и анодной...
Способ позицирования подвижного исполнительного органа прецизионного станка

Номер патента: 585951
Опубликовано: 30.12.1977
МПК: B23Q 1/28
Метки: исполнительного, органа, подвижного, позицирования, прецизионного, станка
...и точности межцентровых расстояний отверстий, обработанных на станке, за счет снижения величины смещения исполнительных органов.Поставленная цель достигается тем, что включение привода зажимного механизма осуществляется до момента окончательной устанонки исполнительного органа в требуемое положение (требуемую координату),При подходе узла к требуемому положению он движется (на станке 2 Д 45 ОПр) со скоростью (1,6 мм/мин от электродвигателя медленных перемещений. В момент, когда узел не дошел до основной риски штриховой меры, соответствующей целому числу миллиметров заданного размера на 10 - 15 мкм, дается команда на включение привода механизма фиксации.Корректор Л. Котова Редактор Чепайкина Заказ 2709/17 Изд.997 Тираж 1207...
Предыдущий патент: Аэродинамический элемент летательного аппарата
Следующий патент: Поддон
Случайный патент: Запорное устройство крышки люка полувагона