Способ определения навигационных параметров для выполнения посадки летательного аппарата на дрейфующую льдину
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
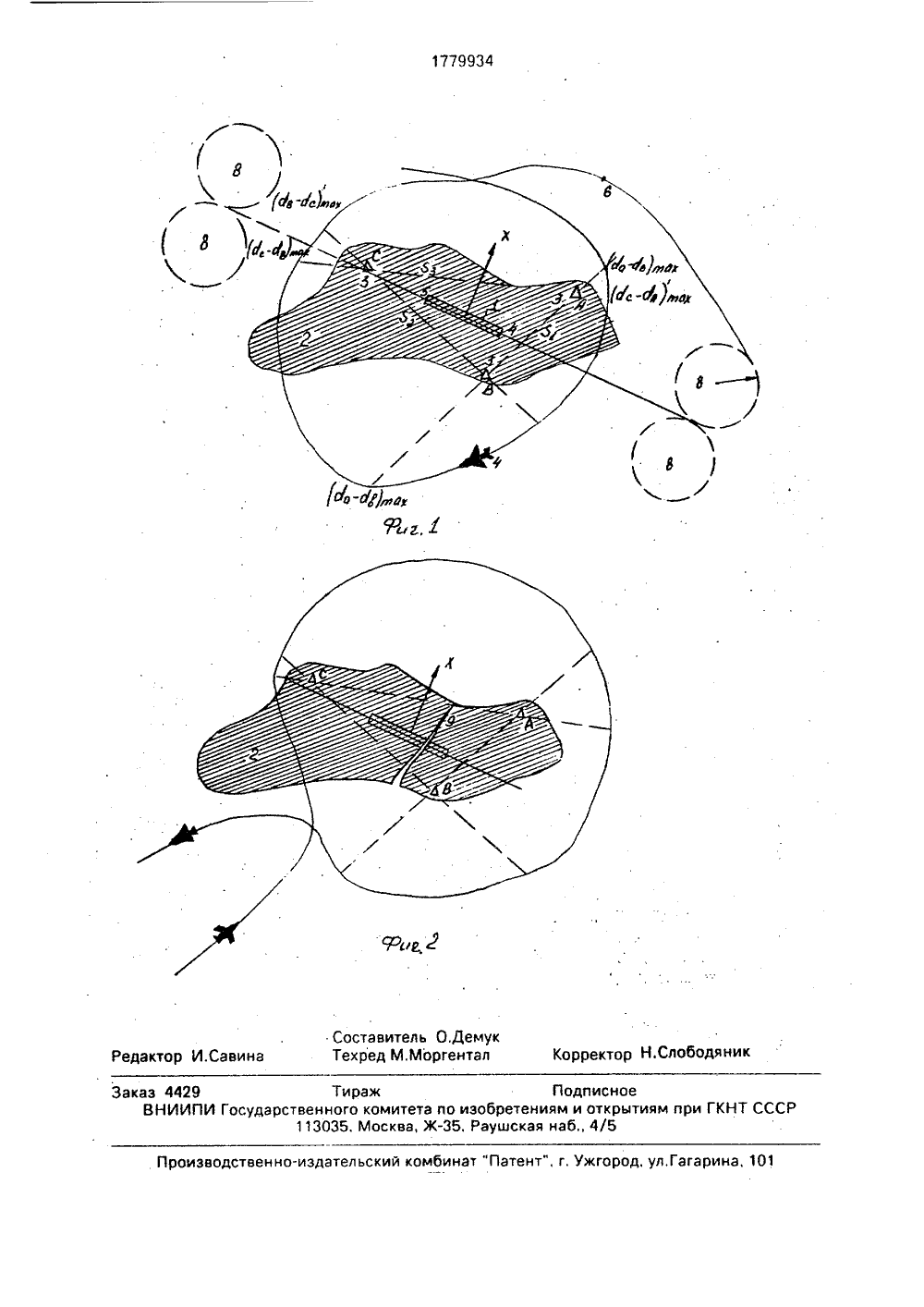
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 1779934 3/00, 6 01 Я 5 5 0 И ОБР ВТОРСКОМ ИДЕТЕЛЬСТВ Н,Абрамов ИГАЦИ- ПОЛНЕЬНОГОЬДИНУ гации. а нных паки летафующую ся павы игационго способа позвоэдход на посддк пько пои Визузль ГОСУДАРСТВЕННОЕ ПАТЕНТНОЕВЕДОМСТВО СССР(56) Хиврич И.Г. и др. Автоматизированное вождение воздушных судов. М.: Транспорт, 1985, с, 101-115.Белкин А.М. и др, Воздушная навигация: Справочник. М.: Транспорт, 1988. с. 192 в 2.(54) СПОСОБ ОПРЕДЕЛЕНИЯ НАВ ОННЫХ ПАРАМЕТРОВ ДЛЯ ВЫ НИЯ ПОСАДКИ ЛЕТАТЕЛ АППАРАТА НА ДРЕЙФУЮЩУЮ Л (57) Изобретение относится к нави именно к определению навигацио раметров для выполнения посад тельного аппарата (ЛА) на дрей льдину, Целью изобретения являет шение точности определения нав Изобретение относится к навигации, а именно к определению навигационных параметров для выполнения посадки на дрейФующие ледовые поля (льдины) в условиях их планово-аэимутальной нестабильности, возможной деформации отсутствия координат пунктов, наземного навигационного обеспечения,Известен способ подготовки и выполнения захода на посадку. в котором летательный аппарат (ЛА) выполняет подлет к району аэродрома и заход на посадку на взлетно-посадочную полосу (ВПП) по данным штурманской прокладки с исоользованых параметров и повышение безопасности посадки ЛА путем учета планово-азимутальной нестабильности и воэможности и возможной деформации ВПП, Способ заключается в том, что размещают на льдине ответчики, формируют при эталонном облете координаты ответчиков и ВПП, формируют и индицируют при всех последующих подлетах и посадках боковые уклонения, поправки к фактическому курсу и другие навигационные параметры, Перед выполнением захода на посадку производят контрольный облет, в результате которого устанавливают факт отсутствия деформации ВПП с формированием и индикацией сообщения о разрешении посадки, При этом навигационные параметры формируются в системе координат текущего положения льдины, что обеспечивается автоматическим формированием координат ответчиков и ВПП льдины, перед заходом на посадку устанавливается факт отсутствия деформаций льдины, 2 ил.еапЪ нием координат аэродрома, посадочногмагнитного путевого угла (азимута осВПП), той или иной установленной схемзахода на посадку. Формируемые при этонавигационные параметры: курсы и дальности рассчитываются в системах координау которых ориентация осей и местоположение центра заранее обусловлены, Привлекаемые при этом средства посадки обладаюмалой точностью выдаваемых линейныхуловых параметров.Использование данноляет произвести подлет ина дрейфующую льдину то1779934 30 35 40 4550 55 ном наблюдении летчика за ВПП, так как истинный или магнитный азимут оси ВПП в данном случае является неизвестным. Расчет линейных и угловых навигационных параметров при подлете и заходе на посадку даже при установке на льдине той или иной посадочной системы невозможен ввиду того, что штурман выполняет свои расчеты в системе координат, не связанной с положением льдины на момент данного подлета, что не позволяет автоматизировать процесс, Деформация же льдины в районе ВПП может быть выявлена только путем ее предварительного наземного обследования.Наиболее близким техническим решением по выполняемым операциям является способ определения навигационных параметров и автоматического захода на посадку с использованием авиационного навигационного комплекса АНК. В этом способе при подлете и заходе на посадку формируются и индицируются боковые уклонения ЛА от линии заданного пути, заданный курс и дальность до заданной точки. На участке подлета эти параметры вырабатываются по данным инерционной системы, а при заходе на посадку по данным курсового и глиссадного радимаяков,К недостаткам данного способа относятся следующие,перед полетом требуется введение координат аэродрома, радионавигационных точек, а также азимута оси ВПП, введение . же этих данных применительно к ВПП дрейфующей льдины вообще не представляется возможным;системы координат курсового и глиссадного радиомаяков на дрейфующей льдине не связаны с используемой на борту системой координат, и поэтому информация от этих радиомаяков не может быть использована вычислителем в автоматическом режиме;деформация ледового поля в районеВПП на момент посадки никак не учитывается с помощью привлекаемых навигационных средств, учет же этого фактор возможен только при наличии геодезического обеспечения, что исключает возможность автоматизации с учетом деформаций;кроме того, привлекаемое в данном случае навигационное оборудование требует наличия на льдине обслуживающего персонала, что в большинстве случаев является невозможным по целому ряду объективных причин;привлекаемые в способесредства обладают малой точностью формирования угловых и линейных параметров. 5 10 15 20 Целью изобретения является повышение точности определения навигационных параметров и повышение безопасности посадки путем учета планово-азимутальной нестабильности и возможной деформации взлетно-посадочной полосы (ВПП).Поставленная цель достигается тем, что в способе определения навигационных параметров для выполнения посадки ЛА на дрейфующую льдину, включающем определение и индикацию в полете заданного курса, высоты, бокоеого отклонения и дальности до заданной точки, дополнительно размещают на льдине не менее трех ответчиков дальномерной системы так, чтобы образуемая ими фигура содержала внутри себя ВПП, измеряют в процессе эталонного облета; осуществляемого с внешней стороны совокупности ответчиков,.дальности от . ЛА до каждого из ответчиков, при завершении облета формируют разности измеренных дальностей до каждой из пар ответчиков, определяют их максимальные по абсолютной величине значения, производят визуальную посадку ЛА на ВПП льдины, измеряют дальности до ответчиков в моменты нахождения ЛА на концах ВПП, определяют и регистрируют координаты ответчиков, концов ВПП, по определенным параметрам формируют посадочную траекторию в схемах заходов на посадку с правого и левого кругов с разных концов ВПП в системе координатльдины с началом в центре ВПП и ориентацией одной из ее осей вдоль оси ВПП, при выполнении каждого из последующих подлетов измеряют дальности до ответчиков, формируют индицируемые навигационные параметры: заданный курс, высоту, боковое отклонение и дальность в системе координат льдины, перед следующей .посадкой осуществляют контрольный облет с внешней стороны совокупности ответчиков, измеряя и регистрируя те же параметры, что и при эталонном объекте после облета при расхождениях между соответствующими полученными из эталонного и контрольного облетов максимальными по абсолютной величине разностями дальностей, не превышающих для всех пар ответчиков порогового значения, формируют и индицируют команду на разрешение посадки, а при превышении порогового значения хотя бы для одной из пар ответчиков формируют и инициируют команду на эапрет посадки, при выполнении посадки заданный курс и высоту определяют в виде поправок к соответственно фактическимкурсу и высоте,На фиг.1 приводится взаимное расположение льдины, ответчиков и трасса кругово 177993410 15 20 25 30 35 40 45 50 55 го эталонного облета при создании навигационного обеспечения; на фиг.2 - ситуация, когда. через ВПП проходит трещина льдины,Способ осуществляется следующим образом.При выборе ВПП 1 на льдине 2 (ледовом поле) производится произвольная установка не менее трех ответчиков 3 (А,В,С) дальномерной системы таким образом, чтобы наряду с обеспечением наилучшей геометрической засечки с них обеспечивался охват извне полученной из них совокупности фигурой (в данном случае треугольником АВС) поверхности ВПП. ЛА 4 с запросчиком дальномерной системы и бортовой цифровой ЭВМ (БЦВМ) выполняет эталонный облет извне по отношению к этой совокупности ответчиков 3, При выполнении облета производится непрерывное измерение дальностей от ЛА до каждого из ответчиков с частотой опроса каждого из них не менее 5 Гц, Полученные дальности по мере их поступления обрабатываются ВБЦВ в реальном масштабе времени. В ходе вычисленийформируются приведенные к горизонтальной плоскости по данным высотомера разности дальностей для каждой из парответчиков, Из геометрических построенийочевидно, что где бы ни :аходился ЛА, мак, симальная разность дальностей до двух ответчиков будет только в момент нахожденияЛА на одной линии с этими двумя ответчиками и при этом она будет равна расстоянию между ответчиками, то есть Я 1, Я 2 и Яз(фиг,1).При выполнении эталонного облета летчик с пульта управления (ПУ) формирует нажатием кнопки команды начала и концаоблета, причем конец облета можно дляобеспечения надежности формировать с перекрытием начала облета,С начала облета и до его конца БЦВМпринимает коды дальностей, формирует ихфизические значения и заносит в ОЗУ разности дальностей, При появлении командыконца облета БЦВМ прекращает считыватьдальности и, используя фильтрацию по методу наименьших квадратов, формируетприменительно к схеме, указанной на фиг.1,следующие значения расстояний между ответчиками: Я = /СА - ОВ/пах = /ОА дВ/ щах; Я 2 = /сВ Ьс/щах = /ЬВ - ос/ щах, Я 2 = ИС ОА/щах = /СС ОА/ вах. Полученные значения запоминаются на магнитном накопителе БЦВМ, Выполнив эталонный облет, летчик выполняет визуальную посадку на ВПП и путем рулежки на полосе с ПУ формирует команды на измерение дальностей в момент нахождения ЛА на концах В ПП, то есть в точках 4 и 5 (фиг,1), По дальностям от ответчиков до концов ВПП и расстояниям между ответчиками БЦВМ формируют координаты ответчиков, концов ВПП и азимут ВПП в системе координат льдины, ориентированной осью по оси ВПП с началом в центре ВПП (см. фиг.1),При последующих штатных подлетах к льдине выполняются следующие операции,При выходе ЛА в район расположения льдины на удалении 100 - 50 км производится переход на автоматическое наведение непосредственно на центр ВПП льдины, По команде с ПУ запросчик начинает формировать дальности до ответчиков и передавать их. на обработку в БЦВМ, По дальностям формируются текущие координаты ЛА в системе координат льдины,По координатам двух точек трассы, удаленных друг от друга на расстояние 150 - 200 м, формируется текущий. курс в системе координат льдины, Одновременно с этим в той же системе формируется текущий курс на точках начала координат (центр ВПП). Разность между этими двумя курсами является поправкой к текущему истинному или магнитному курсу ЛА, Данная поправка индицируется летчику, задачей которого является путем разворота ЛА свести ее к нулю, причем угол сноса в данном случае не влияет на индицируемую курсовую поправку.Одновременно с этим формируется и индицируется дальность до центра ВПП, а также рекомендуемая дальность до начала контрольного облета, При достижении льдины летчик, ориентируясь на индицируемые дальности, выводит ЛА на контрольный облет ответчиков (фиг.2). Выполняемые при этом операции аналогичны операциям эталонного облета, причем траектория контрольного облета может быть произвольной, При поступлении в ПУ команды конца контрольного облета БЦВМ, используя аналогичные эталонному облету вычисления, формирует контрольные расстояния между ответчиками и производит сравнение всех соответствующих эталонных и контрольных максимальных разностей дальностей (разность между эталонными и контрольными расстояниями между ответчиками), Если из сравнения установлено, что расхождение для каждой из пар ответчиков не превышает порогового значения, которое применительно к предполагаемому бортовому устройству равно 0,5 м, то фордируется и индицируется команда разрешения посадки;5 10 20 25 30 35 40 45 При этом на всех участках 6 - 4 (фиг,1) БЦВМ формирует и индицирует боковое уклонение от заданной траектории на данном участке, поправку к фактическому курсу и рассогласование между фактической и заданной высотами.В случае, если установлено, что по данным контрольного облета расстояния хотя бы для одной пары ответчиков отличаются от эталонных значений, то зто означает деформацию льдины в районе ВПП 9 (фиг.2), В этом случае формируется и инициируется команда на запрет посадки и летчик принимает решение или на визуальную посадку в другой части льдины, или о возврате на исходный или запасной аэродром.Способ реализуется с помощью галсовой радионавигационной системы, содержащей бортовое оборудование в составе блока запросчика, блока обработки сигналов с пультом управления на базе БЦВМ , типа ТС-101 с соответствующими аппаратна-программными средствами и блока антенно-фидерных устройств, а также наземного оборудования в виде трех или более ответчиков.Дальность действия системы 400 км, точность измерения дальностей + Д х 10Предложенный способ позволяет обеспечить безопасность посадок ЛА как на дрейфующие, так и на неподвижные ледовые поля (льдины) в сложных метеоусловиях с отсутствием возможности определения координат ответчиков и геодезического контроля за деформацией ВПП.Формула изобретения Способ определения навигационныхпараметров для выполнения посадки летательного аппарата на дрейфующую льдину, включающий определение и индикацию в полете заданного курса, высоты. бокового отклонения и дальности до заданной точки, от л и ч а ю щи й с я тем, что, с целью повышения точности определения навигационных параметров и повышения безопасности посадки путем учета планово-азимутальной нестабильности и возможной деформации взлетно-посадочной полосы (ВПП), дополнительно размещают на льдине не менее трех ответчиков дальномерной системы так, чтобы образуемая ими фигура содержала внутри себя ВПП, измеряют в процессе эталонного облета, осуществляемого с внешней стороны совокупности ответчиков, дальности от ЛА до каждого иэ ответчиков, при завершении облета формируют разности измеренных дальностей до каждой иэ пар ответчиков,определяют их максимальные по абсолютной величине значения, производят визуальную посадку ЛА на ВПП льдины, измеряют дальности до ответчиков в моменты нахождения ЛА на концах ВПП, определяют и регистрируют координаты ответчиков, концов ВПП, по определенным параметрам формируют посадочную траекторию в схемах заходов на посадку с правого и левого кругов с разных концов ВПП в системе координат льдины с.началом в центре ВПП и ориентацией одной из осей вдоль оси ВПП, при выполнении каждого из последующих подлетов измеряют дальности до ответчиков, формируют индицируемое навигационные параметры - заданный курс, высоту. боковое отклонение и дальность в системе координат льдины, перед следующей посадкой осуществляют контрольный облет с внешней стороны совокупности ответчиков, измеряя и регистрируя при этом те же параметры, что и при эталонном облете, после облета при расхождениях между соответствующими полученными из эталонного и контрольного облетов максимальными по абсолютной величине разностям дальностей. не превышающих для всех пар ответчиков порогового значения, формируют и индицируют команду на разрешение посадки. при превышении порогового значения хотя бы для одной пары ответчиков формируют и индицируют команду на запрет посадки, при выполнении посадки заданный курс и высоту определяют в виде поправок к соответственно фактическому курсу и высоте,1779934Ф/юФСоставитель О,Демукедактор И.Савина Техред М.Моргентал Корректор Н,Слободян кэз 4429 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ ССС113035, Москва, Ж, Раушская наб 4/5оизводственно-издательский комбинат "Патент", г, Ужгород, ул,Гагарина, 101
СмотретьЗаявка
4891002, 06.11.1990
НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "ВЗЛЕТ"
ЛЫКОВ ВЛАДИМИР АРКАДЬЕВИЧ, РОНЖИН ГЕННАДИЙ АЛЕКСЕЕВИЧ, АБРАМОВ КОНСТАНТИН НИКОЛАЕВИЧ, ФИЛИППОВ ДМИТРИЙ СЕРГЕЕВИЧ
МПК / Метки
МПК: G01C 23/00, G01S 5/00
Метки: аппарата, выполнения, дрейфующую, летательного, льдину, навигационных, параметров, посадки
Опубликовано: 07.12.1992
Код ссылки
<a href="https://patents.su/5-1779934-sposob-opredeleniya-navigacionnykh-parametrov-dlya-vypolneniya-posadki-letatelnogo-apparata-na-drejjfuyushhuyu-ldinu.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения навигационных параметров для выполнения посадки летательного аппарата на дрейфующую льдину</a>
Устройство измерения угловых координат систем посадки

Номер патента: 1252747
Опубликовано: 23.08.1986
Авторы: Баскаков, Говс, Гришин, Дьяконова, Кузнецов, Максименко, Чирицо
МПК: G01S 7/36
Метки: координат, посадки, систем, угловых
...вход каждого компаратора подаются опорные напряжения верхнего и нижнего порогов, представляющие собой сумму напряженийс выхода запоминающего блока и напряжения смещения, формируемогодля каждого входа отдельно. Свыходов кокараторов 18 сигнал черезэлемент И 20 поступает на генератор7(14) строба, на выходе которого поистечении определенного времени СсФормируется строб-импульс определенной длительности. Генератор стробареализован на двух времяэадающих устройствах: первое отсчитывает времяот начала импульса на выходе блокаанализа до окончания переходногопроцесса на выходе ФНЧ ( ),а второезапускается от выходного сигналапервого и Формирует строб-импульсс длительностью, достаточной дляполного заряда конденсатора запоминающего...
Устройство определения угловых координат радиотехнической системы посадки
Номер патента: 573074
Опубликовано: 10.09.1999
Авторы: Громов, Пахолков, Смирнов, Штерляев
МПК: G01S 1/54
Метки: координат, посадки, радиотехнической, системы, угловых
Устройство определения угловых координат радиотехнической системы посадки, включающее наземное оборудование, содержащее возбудитель, выход которого подключен к первому входу фазового манипулятора, второй вход которого соединен с выходом кодирующего блока преамбулы, а выход фазового манипулятора соединен с первым входом коммутатора антенн, первый выход которого подключен к входу слабонаправленной передающей антенны преамбулы, второй выход - к антенне сканирующего луча, а второй вход коммутатора антенн соединен с первым выходом синхронизатора, второй выход которого соединен с входом кодирующего блока преамбулы, а также бортовое оборудование, содержащее приемную антенну, соединенную с входом...
Устройство измерения угловой координаты системы посадки
Номер патента: 1760868
Опубликовано: 27.09.1995
Авторы: Криворучко, Пименов, Пономаренко
Метки: координаты, посадки, системы, угловой
1. УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВОЙ КООРДИНАТЫ СИСТЕМЫ ПОСАДКИ, содержащее блок вычисления коэффициента разнослышимости, выход которого является выходом устройства, отличающееся тем, что, с целью повышения точности измерения угловой координаты, в него введены последовательно соединенные компаратор, измеритель длительности импульса, первый блок сравнения кодов, первый элемент НЕ и элемент И, последовательно соединенные второй элемент НЕ и измеритель длительности паузы, а также второй блок сравнения кодов и генератор тактовой частоты, при этом первый вход компаратора соединен с сигнальным входом блока вычисления коэффициента разнослышимости и является входом устройства, второй вход компаратора является входом напряжения порога, выход цифрового...
Устройство посадки летательных аппаратов

Номер патента: 519951
Опубликовано: 23.05.1982
Авторы: Мировицкий, Назаров, Пичугин, Самсонов, Шанин
МПК: B64D 45/08, G01C 21/00
Метки: аппаратов, летательных, посадки
...определяется положением ЛА относительно центра зоны посадки. Заметим, что блок 5 логики содержит алгоритмы управления сканированием, которые выбираются с таким расчетом, чтобы минимизировать количество операций управления ЛА, необходимое для выведения его ла траекторию снижения в зоне посадки.Прошедшее через апертуру излучение поступает на линзу 6, осуществляющую прямое Фурье-преобразование. В фокальной плоскости этой линзы установлен голографический фильтр 8, согласованный на участок поверхности с профилем, пригодным для надежного осуществления посадки. В зависимости от требований полетного задания, голографический фильтр 8 может быть сменным. Линза 7 предназначена для выполнения обратного Фурье-преобразования, В фокальной плоскости...
Устройство для формирования сигнала управления летательным аппаратом при заходе на посадку

Номер патента: 1720933
Опубликовано: 23.03.1992
Автор: Барабаш
МПК: B64C 13/00, B64C 13/18
Метки: аппаратом, заходе, летательным, посадку, сигнала, формирования
...измеряющее дальность от ЛА до контрольной точки О, равноудаленной от торцов ВПП Яц (фиг, 2), в вычитающее устройство 4,2, куда поступает сигнал с задатчика 4,1, пропорциональный длине ВПП (1 впп), происходит коррекция величины Зц, компенсирующая удаление от торца ВПП до контрольной точки О, Скорректированная величина Б пропорциональна удалению ВС от торца ВПП,В делителе 4.3 по сигналам Я исти полета) рассчитывается времягося полета до торца ВПП=ИЧ, (1)Задатчик 4,8 вырабатывает сигнал, пропорциональный выбранному углу наклона глиссады О, который преобразовывается синусным преобразователем 4,4 в сигнал, пропорциональный з 1 п О . По величинам з 1 п О и Я в умножителе 4,5 рассчитывается требуемая высота в данный момент для полета...
Предыдущий патент: Способ определения разности углов планетной рефракции на двух длинах волн
Следующий патент: Преобразователь сигнала в его среднее значение
Случайный патент: Чаесборочный аппарат