Система управления исполнительным органом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
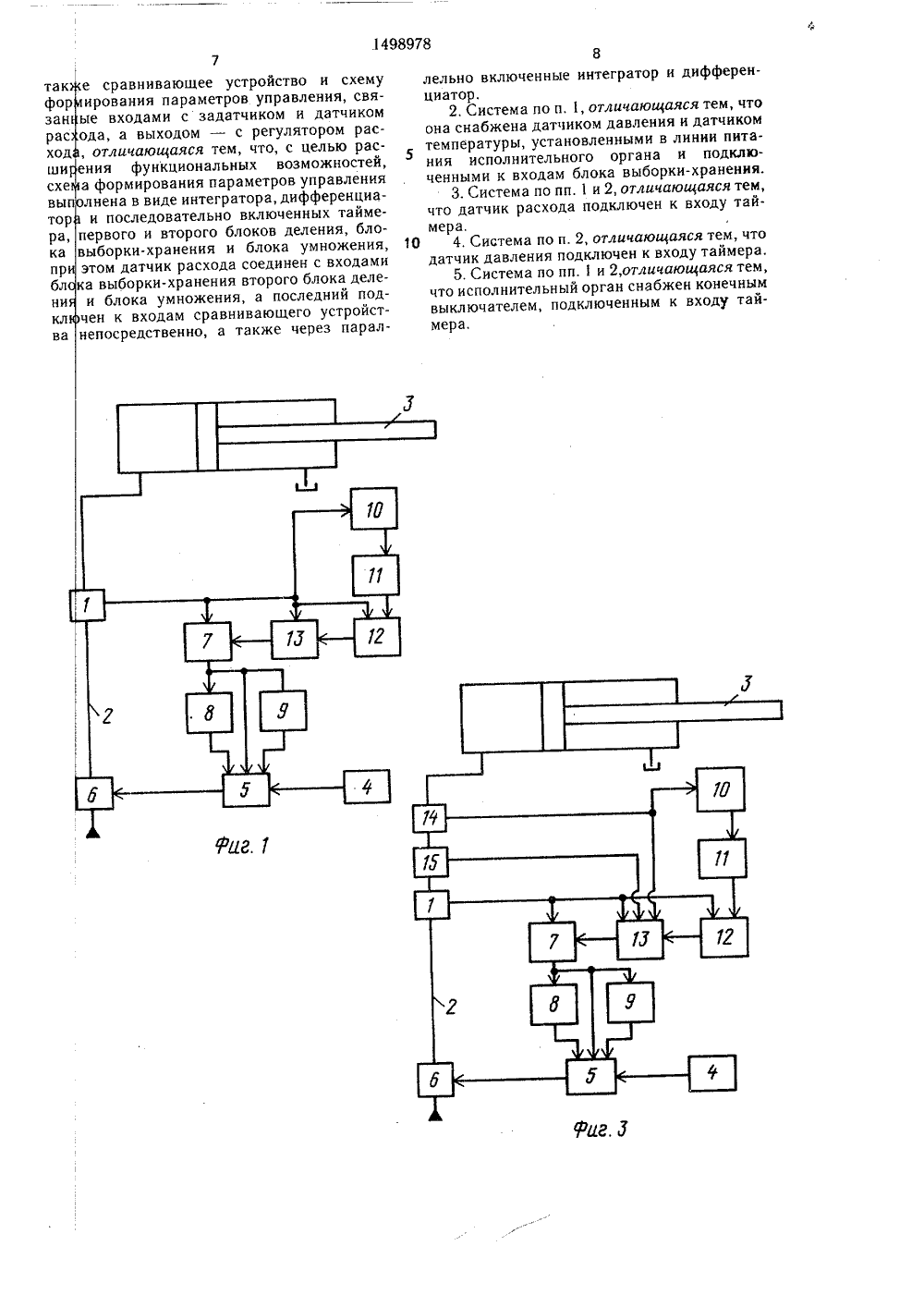
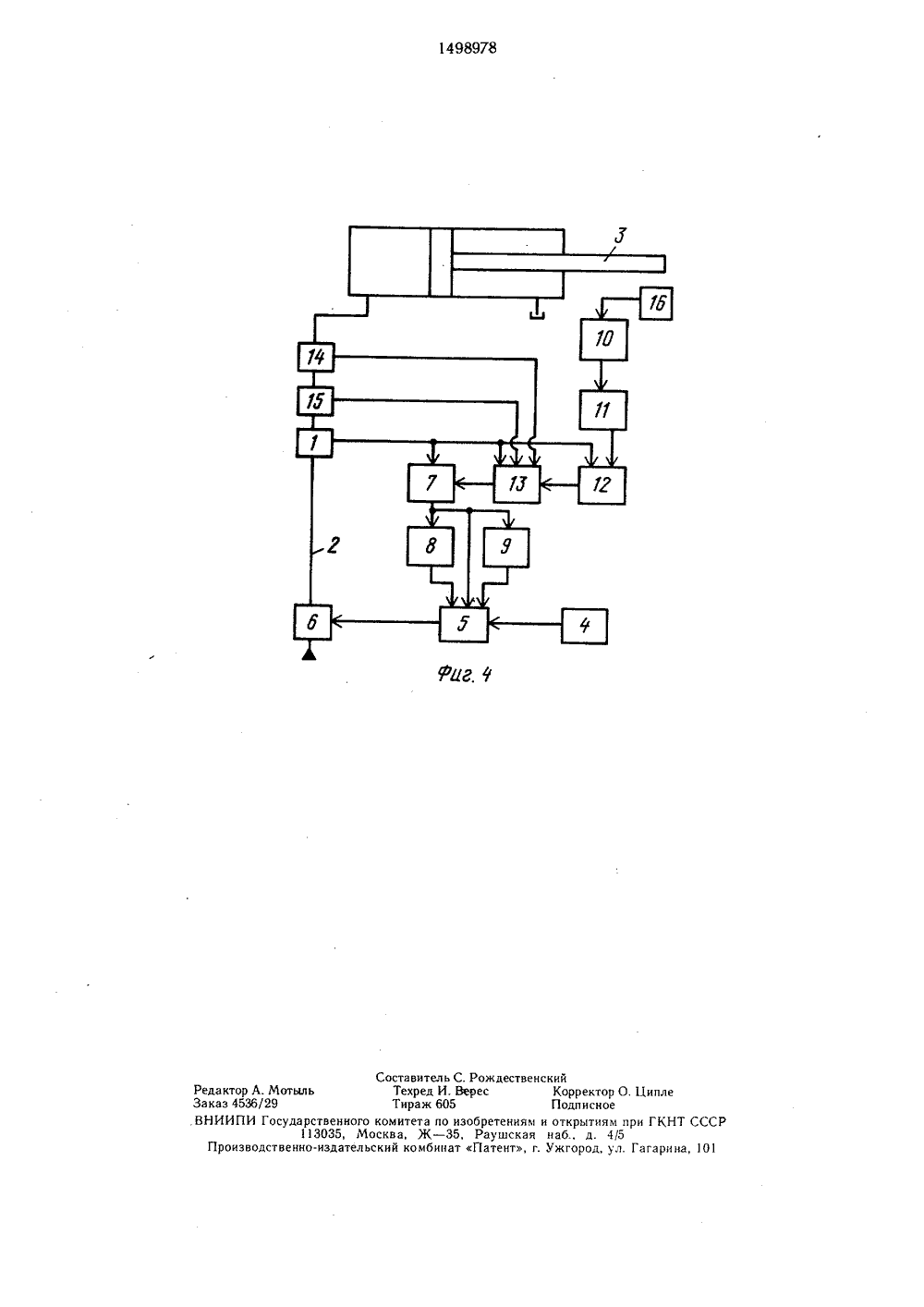
СОК.3 СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 119) (11) 49897 15 В 9 03 Г,1:г ЕН фиг 1 ГОСУДАРСТ 8 ЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИПРИ ГКНТ СССР ОПИСАНИЕ ИЗОБ К А ВТОРСКОМУ СВИДЕТЕЛЬ(71) Хабаровский политехнический институт(57) Изобретение м. б. использовано в приводах управления станков, промышленныхроботов и манипуляторов. Цель изобретения - расширение функциональных возможностей системы управления. В линии 2 питания исполнительного органа 3 последовательно установлены регулятор 6 и датчик (Д)расхода. Сравнивающее устр-во 5 и схема формирования параметров управления свя. заны входами с задатчиком 4 и Д 1, выходом - с регулятором 6. Схема выполнена в виде интегратора 8, дифференциатора 9 и последовательно включенных таймера 10, первого и второго блоков (Б) 11, 12 деления, Б 13 выборки-хранения и Б 7 умножения. Дсоединен с входами Б 13, 12, 7. Б 7 подключен к входам устр-ва 5 непосредственно и через параллельно включенные интегратор 8 и дифференциатор 9. Д 14, 5 давления и т-ры установлены в линии 2 и подключены к входам Б 13, Д 1, 4 подключены к входу таймера 10. Конечный выключатель органа 3 подключен к входу таймера 10. Использование выключателя позволяет уменьшить время диагностических движений, 4 з.п.ф-лы, 4 ил.1498978вода, содержащая аналогичные блоки с устройством по фиг, 3 и отличающаяся тем, что х отсутствует связь выхода датчика 14 давления с входом таймера 10, а также тем, что дополнительно содержит конечный выключатель 16, установленный на исполнительном 1 органе 3 и связанный с входом таймера 10. о Система (фиг, 1) работает следующимобразом.е После включения гидро(пневмо) привоО да, перед началом цикла рабочего движес ния по команде от задатчика 4 осущеи ствляется диагностическое движение исполнительного органа 3 от одного конечного положения до другого. Сигналы о начале и5 окончании диагностического движения исполнительного органа 3 поступают от датчика 1 в таймер 10, Таймер 10 срабатывает, а сигнал о времени диагностического движения поступает на вход первого блока 11 деления, где происходит определение20 скорости движения исполнительного органа 3 о между двумя конечными положениями(3) 3Изобретение относится к гидропневмоавоматике и может быть использовано в при одах управления станков, промышленны оботов и манипуляторов.Цель изобретения - расширение функ 1 иональных возможностей.На фиг. 1 изображена схема системьправления исполнительным органом гидр пневмо) привода с датчиком расхода, под люченным к входу таймера в качеств игнализатора о начале и конце диагности еского движения; на фиг. 2 - то же, веденными в линию питания датчикам авления и температуры; на фиг. 3 - то же с использованием датчика давления, подклю ченного к входу таймера, в качестве сигна лизатора о начале и конце диагностичес кого движения; на фиг. 4 - то же, с ис пользованием конечного выключателя, под ключенного к входу таймера.Система управления (фиг. 1) содержи датчик 1 расхода (скорости), установлен ный в линии 2 питания исполнительног органа 3 гидро(пневмо) привода, задатчик 4, сравнивающее устройство 5, регулятор 6 и блок 7 умножения, связанный входом с выходом датчика 1, выход блока 7 умножения связан с входами интегратора 8, дифференциатора 9 и непосредственно с входом срав, нивающего устройства 5, выходы параллельно включенных интегратора 8 и дифференциатора 9 соединены с входами сравнивающего устройства 5. Кроме того, система содержит таймер 10, первый блок 11 деления, второй блок 12 деления и блок 13 выборки- хранения. Интегратор 8, дифференциатор 9 и последовательно включенные таймер 10, блоки 11, 12, 13 и 7 образуют схему формирования параметра управления.Таймер О связан входом с выходом датчика 1, выход таймера 10 связан с входом первого блока 11 деления, выход которого связан с входом второго блока 12 деления, причем другой вход второго блока 2 деления связан с выходом датчика 1, выход второго блока 12 деления связан с входом слака 13 выборки-хранения, другой вход блона 13 выборки-хранения связан с выходом дагчика 1, выход блока 13 выборки- хранения соединен с входом блока 7 умножения.Система управления исполнительным органом (фиг. 2) состоит из тех же блоков, что и устройство, представленное на фиг. 1, и в отличие от него содержит датчик 14 давления и датчик 15 температуры, установленные в линии 2 питания и соединенные с входами блока 13 выборки-хранения.Система (фиг, 3) отличается от фиг. 1 и 2 тем, что отсутствует связь датчика 1 с входом таймера 10 и введена новая связь между выходом датчика 4 давления и входом таймера 10.На фиг. 4 показана система управления исполнительным органом гидро(пневмо) при(1)где 1. - расстояние между двумя конечнымиположениями исполнительного органа 3;- время перемещения исполнительного органа 3 между конечными положениямии.ЗО Сигнал от датчика 1 о величине скорости рабочей среды в линии 2 питания во время диагностического движения поступает на вход второго блока 12 деления и одновременно на входы блока3 выборки-хранения и блока 7 умножения. Во втором блоЗ 5 ке 12 деления происходит вычисление отношения скорости перемещения исполнительного органа 3 и скорости рабочей среды в линии 2 питания в виде коэффициента соот- ношения 40(2)Угде и - скорость рабочей среды в линии 2питания. 45 Сигнал о величине коэффициента соотношения с выхода второго блока 12 деления поступает на вход блока 13 выборки-хранения, где коэффициент соотношения ставится в соответствии с величиной, полученной от датчика . Значение коэффициента К из 50 блока 13 выборки-хранения поступает навход блока 7 умножения,После начала рабочего движения исполнительного органа 3 сигнал от датчика 1 поступает на вход блока 7 умножения. В блоке 7 умножения происходит определение 55 скорости рабочего движения исполнительного органа 3Сигнал из блока 7 умножения поступает на вход сравнивающего устройства 5. Одновременно этот сигнал поступает на входы интегратора 8 и дифференциатора 9, сигналы с выходов которых о величине перемещения и ускорения поступают, на входы сравнивающего устройства 5, в котором происходит сравнение поступивших сигналов о величине перемещения, скорости и ускорения исполнительного органа 3 с сигналами, поступающими на входы сравнивающего устройства 5 от задатчика 4. По результатам сравнения на выходе сравнивающего устройства 5 возникает управляющий сигнал, поступающий на вход регулятора 6, установленного в линии 2 питания.В процессе работы гидро(пневмо)привода диагностические движения повторяются через определенные промежутки времени в соответствии с программой, определяемой задатчиком 4, В процессе этих диагностических движений происходит вычисление коэффициента соотношения скорости перемещения исполнительного органа 3 и скорости рабочей среды в линии 2 питания по формуле (2). Значения полученных величин коэффициента соотношения скорости К при определенных значениях скорости рабочей среды У в линии 2 питания поступают на вход блока 3 выборки-хранения и запоминаются вместе с полученным значением скорости рабочей среды.В процессе рабочего движения сигнал от датчика 1, установленного в линии 2 питания, поступает на вход блока 7 умножения и блока 13 выборки-хранения. При этом коэффициент соотношения скоростей К для определения скорости рабочего движения исполнительного органа 3 по формуле (3) берется в блоке 13 выборки-хранения в соответствии с величиной скорости рабочей среды К полученной от датчика 1, установленного в линии 2 питания, и поступает на вход блока 7 умножения, где и происходит вычисление скорости рабочего движения исполнительного органа 3.Система (фиг. 2) работает аналогично устройству на фиг. 1 за исключением того, что после определения скорости диагностического движения исполнительного органа 3 между думя конечными положениями по формуле (1) сигнал от датчика 1 поступает на вход блока 3 выборки-хранения одновременно с сигналами от датчиков 14, 15 давления и температуры, установленных в линии 2 питания. Затем происходит определение коэффициента соотношения скоростей во время диагностического движения по формуле (2). Далее сигнал о величине коэффициента соотношения с выхода второго блока 12 деления поступает на вход блока 13 выборки-хранения, где коэффициент соотношения ставится в соответствии с величинами, полученными от датчика 1, датчика 14 давления и датчика 15 температуры. После начала рабочего движения скорость движения исполнительного органа 3 определяется аналогично описанию работы устройства на фиг.по формуле (3). Аналогичным образом происходит и дальнейшая обработка величины скорости исполнительногооргана 3.В процессе работы гидро(пневмо) привода при осуществлении диагностическихдвижений значения полученных коэффициен.О тов соотношения скоростей К поступают навход блока 13 выборки-хранения вместе свеличинами расхода (скорости), давления,температуры от датчиков 1, 14, 15 и запоминаются.В процессе рабочего движения коэффициент соотношения скоростей К для определения скорости рабочего движения исполнительного органа 3 по формуле (3) берется в блоке 13 выборки-хранения в соответствии с поступившими в блок 13 выборки 20 хранения величинами расхода (скорости),давления и температуры рабочей среды в линии 2 питания от датчиков 1, 4 и 15. Значение выбранного коэффициента К поступаетна вход блока 7 умножения, где и проис 25 ходит определение скорости рабочего движения исполнительного органа 3.Система (фиг. 3) работает аналогичносистеме на фиг. 2 за исключением того,что сигнал о начале и конце диагностического движения подает не датчик 1 расхо 30 да, а датчик 14 давления.Система (фиг. 4) работает аналогичноустройству на фиг, 3. В этом случае сигнало начале и конце диагностического движенияподает конечный выключатель 16, что позволяет сократить величину диагностическо 35 го движения.Таким образом, предлагаемая системапозволяет находить действительные перемещения исполнительного органа по скорости или по расходу рабочей среды в линии питания, позволяет как позициониро 40 вать рабочий орган, так и программно управлять скоростью движения исполнительного органа, его ускорением и торможением,использование же диагностической информации позволяет повысить точность, так какдиагностическая информация измеряется приразличных параметрах рабочей среды, чтодает уточненные значения скорости и ускорения движения исполнительного органа и всвою очередь более точные значения перемещений исполнительного органа, а исполь 50 зование конечного выключателя позволяетуменьшить время диагностических движений,Формула изобретения551. Система управления исполнительныморганом, содержащая регулятор и датчик расхода, последовательно установленные в линии питания исполнительного органа, а7так е сравнивающее устройство и схему фор ирования параметров управления, связан ые входами с задатчиком и датчиком рас ода, а выходом - с регулятором расход, отличающаяся тем, что, с целью расши ения функциональных возможностей, схе а формирования параметров управления вып лнена в виде интегратора, дифференциатор и последовательно включенных таймера, первого и второго блоков деления, блока выборки-хранения и блока умножения, пр этом датчик расхода соединен с входами бл ка выборки-хранения второго блока делени и блока умножения, а последний подкл чен к входам сравнивающего устройства непосредственно, а также через парал 8лельно включенные интегратор и дифференциатор.2. Система по п. 1, отличающаяся тем, чтоона снабжена датчиком давления и датчикомтемпературы, установленными в линии питания исполнительного органа и подключенными к входам блока выборки-хранения.3. Система по пп. 1 и 2, отличающаяся тем,что датчик расхода подключен к входу таймера,1 О 4, Система по и. 2, отличающаяся тем, чтодатчик давления подключен к входу таймера.5. Система по пп. 1 и 2,отличающаяся тем,что исполнительный орган снабжен конечнымвыключателем, подключенным к входу таймера.1498978 Раг итель С. Рождесред И. Вересаж 605та по изобретенЖ - 35, Раушсмбинат Патен ст Те Ти р О. Ципле ИПИ Государственного комит 113035, Москва,оизводственно-издательский коРедактор А. МотЗаказ 4536/29ВНИ твенскийКорректоПодписииям и открытикая наб., д.т, г. Ужгород,м при ГКНТ СССР
СмотретьЗаявка
4322348, 10.11.1987
ХАБАРОВСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
ЯЗЫКОВ ВЯЧЕСЛАВ АНДРЕЕВИЧ, ПЕРОВ ЮРИЙ НИКОЛАЕВИЧ
МПК / Метки
МПК: F15B 9/03
Метки: исполнительным, органом
Опубликовано: 07.08.1989
Код ссылки
<a href="https://patents.su/5-1498978-sistema-upravleniya-ispolnitelnym-organom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления исполнительным органом</a>
Способ определения перемещения рабочего органа исполнительного механизма гидропривода

Номер патента: 1377497
Опубликовано: 28.02.1988
МПК: F15B 19/00
Метки: гидропривода, исполнительного, механизма, органа, перемещения, рабочего
...Москва, Ж, Раушская наб д,4/5ф.Производственно-полиграфическое предприятие, г,ужгород, ул,Проектная,4 Изобретение относится к машино-,.строению и может быть использовано всистемах автоматического управлениягидроприводами. Цель изобретения - повышение надежности при эксплуатации в условиях с повышенной вибрацией, влажностью, температурой. 30 Предлагаемый способ осуществляетсяследующим образом.115 При работе гидропривода измеряют расход, температуру и давление .в гид ролинии питания исполнительного механизма и по предварительно полученной зависимости перемещения рабочего ор гана исполнительного механизма от расхода в гидролинии питания при различных значениях температуры и давления рабочей жидкости определяют величину перемещения рабочего...
Система управления скоростью движения транспортного средства

Номер патента: 1537575
Опубликовано: 23.01.1990
Авторы: Гришкевич, Кравец, Кравцов, Резников, Черванев
МПК: B60K 41/00
Метки: движения, скоростью, средства, транспортного
...18 (Ь 1 з=1), выполняющего выпуск сжатого воздуха из управляющей полости А модулятора 11 в атмосферу. Переход к блоку 88.Блок 88. Проверяется наличие давления в управляющей полости А модулято 1537575 105 10 15 20 ра 11. Если давление равно атмосферному (Р=О), то осуществляется переход к блоку 89, если нет - на блок 70.Блок 89. Обесточивается электропневмоклапан 16 (Си=О), обеспечивающий подачу сжатого воздуха на вход модулятора 11.Блок 90. Обесточивается электропневмоклапан 17 (Оп=О), обеспечивающий выдержку давления в управляющей полости А модулятора 11. Выполняется переход к блоку 91.Блок 91. Обесточивается электропневмоклапан 18 (Ув=О), обеспечивающий выпуск сжатого воздуха из управляющей полости А модулятора 11 в атмосферу....
Гидравлический привод исполнительного органа металлорежущего станка

Номер патента: 1021567
Опубликовано: 07.06.1983
Авторы: Володько, Горский, Дривень, Жилинский, Кузьмич, Тилигузов
МПК: B23Q 15/00
Метки: гидравлический, исполнительного, металлорежущего, органа, привод, станка
...блок 14, выполненный с возможностью настройки его параметров. Один вход суммирующего усилителя 13 соединен с задатчиком давления 2, другой через корректирующий блок 14 - с датчиком давления 11, а выход - с электромеханическим3преобразователем 10 гидравлического усилителя 9. Корректирующий блок 14 связан с датчиком скорости 15 исполнительного органа 2 через систему регулирования, которая включает в себя задатчик 16, блок сравнения 17 сигналов датчика 15 и задатчика 6 и механизм настройки 18 корректирующего блока 14. Один вход блока сравнения 1 соединен с датчиком 15, другой - с задатчиком 16, а выход - механизмом настройки 10 корректирующего блока 14.Гидравлический привод исполнительного органа металлорежущего станка работает...
Устройство для автоматической синхронизации скоростей рабочих органов посевного агрегата со скоростью движения трактора

Номер патента: 144654
Опубликовано: 01.01.1962
Автор: Безуглый
Метки: автоматической, агрегата, движения, органов, посевного, рабочих, синхронизации, скоростей, скоростью, трактора
...посевного агрегата пропорциональность между условиями и линейными ускорениями нарушается, что приводит в свою очередь к нарушению равновесия моста блока сравнения и сдвигу фазы команды датчика 9. Величина рассогласования моста, пропорциональная разности углового и линейного ускорений в данный момент, то есть пропорциональная второй производной пути проскальзывания по времени, используется для коррекции, осуществляемой по следующей цепи: сигнал рассогласования (преобразованный и усиленный) -исполнительный двигатель б - :-дифференциал 7 - ротор датчика 9,Ввод корректирующих команд в обмотку управления исполнительного двигателя осуществляется двояко:а) по отклонению, возникающему во время проскальзывания колес сеялки, которое получается в...
Датчик положения исполнительного органа(

Номер патента: 177764
Опубликовано: 01.01.1966
Автор: Шарин
МПК: G01B 7/00, G05B 19/02
Метки: датчик, исполнительного, органа, положения
...делений шкалы точного отсчета,Изменяя число ламелей шкал, можно вочень широких пределах изменять разрешающую способность от 0,05 до 0,0005 яд (пришаге винта 5 11 лг и передаточном отношении,равном единице).Все сказанное выше будет справедливымтакже, если изготовить шкалу с пазами, параллельными образующей барабана (фиг, 1, б),и для точного отсчета перемещать щетку поВИНТОВой ЛИНИИ.В корпусе 1 (фцг. 2) на стакане 2.неподвижно закреплен текстолитовый барабан 3 с бронзовыъ 1 И ламелямц, Вал 4 сОединяется с винтОмподачи исполнительного органа автомата и передает вращателы 1 ое движение щеткодержателю 5 и щеткам, которые контактируют с ламелями барабана. Щетками являются контактные пластины реле МЕУ, Лимб б позволяетпроизводить визуальный...
Предыдущий патент: Мультипликатор давления
Следующий патент: Система регулирования скорости гидродвигателя
Случайный патент: Двухкамерный карбюратор для двигателя внутреннего сгорания