Устройство для управления процессом выбора зазоров механических передач в двухдвигательном электроприводе поворота экскаватора
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
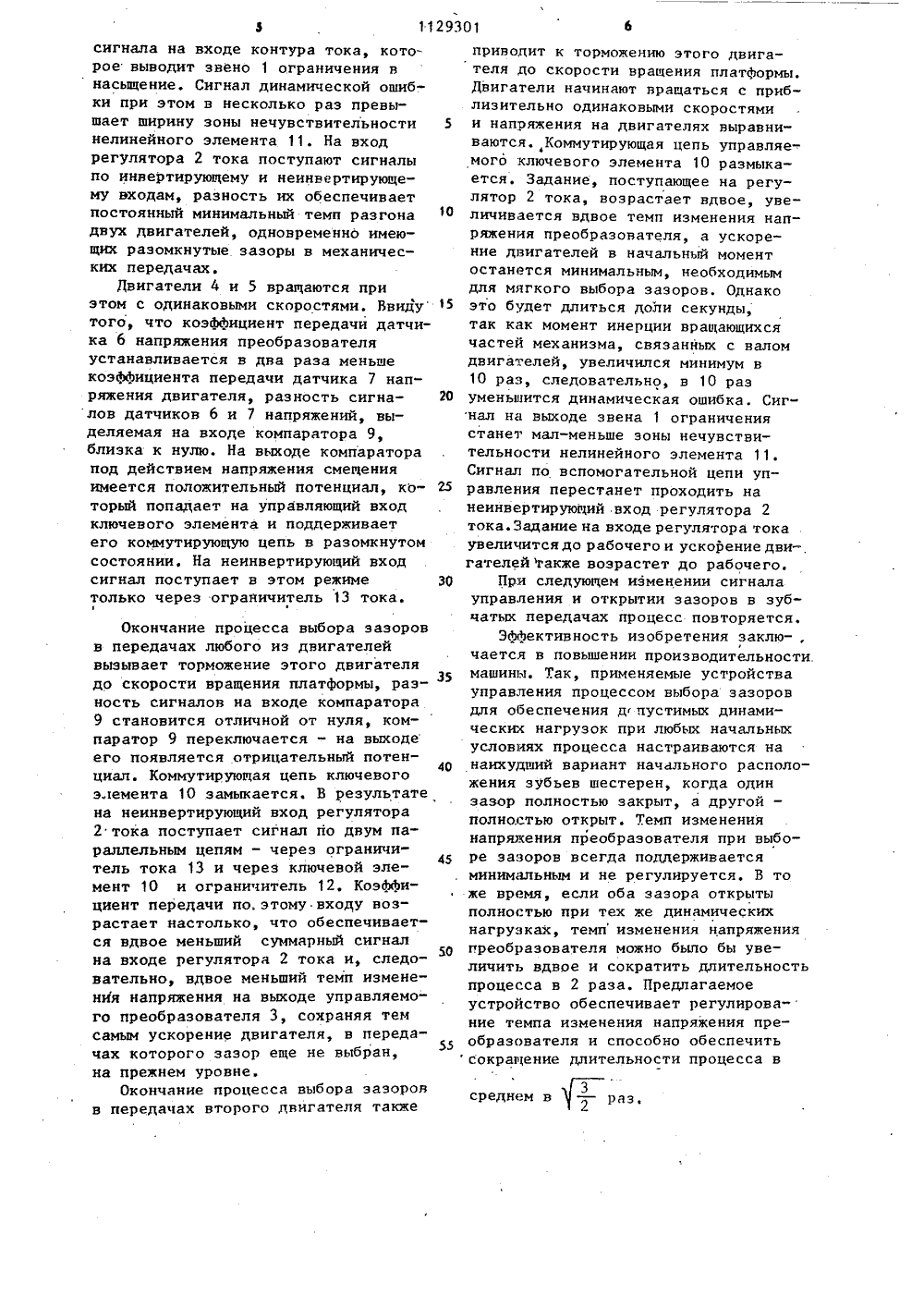
(71)деначескобъед один непоср атчнк тока и челью ст 3)(56) 1. Авт У 412358, к2, Автор У 1015053, (прототип),(54)(57) УСТПРОЦЕССОМ ВЬКИХ ПЕРЕДАЧРОПРИВОДЕ ПОсодержащее дэлемент, звподключеннорального реторого соедиго преобраз ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЬПИЙ ПИСАНИЕ И К АВТОРСКОМУ СВИДЕТЕЛ 3615476/29-0304.07.8315,12.84. Бюл. Р 46В.И. Ключев, В.Н,Остриров,авченков, 1 О.Т.Калашников,ошевой и В.И.ПузановМосковский ордена Ленина и орОктябрьской Революции энергетий институт и Производственноеинение "Ново-Краматорский .машоительный завод622.022.74(088.8) рское свидетельство ССС, Е 02 Г 9/20.кое свидетельство СССРл, Е 02 Р 9/20, 1981 РОИСТВО ДЛЯ УПРАВЛЕНИЯ БОРА ЗАЗОРОВ МЕХАНИЧЕСВ ДВУХДВИГАТЕЛЬНОМ ЭЛЕКТВОРОТА-ЭКСКАВАТОРА, атчик тока, ключевой но ограничения, выходом к первому входу интегулятора трка, выход конен с входом управляемователя, выходы которого едственно, а другои через д подключены к последовательно соединенным двигателям, о т - л ающееся тем,что, с ц повышения надежности работы, оно снабжено датчиком напряжения управляемого преобразователя, датчиком напряжения одного из двигателей, компаратором, нелинейным, элементом с зоной нечувствительности и двумя ограничителями тока, выходы датчика напряжения управляемого преобразователя и датчика напряжения одного из двигателей подключены соответственно к первому и второму входам компаратора, выход которого подключен к управляющему входу ключевого элемента, выход датчика тока подключен к входу звена ограничения, выход которого подключен также к входу нелинейного элемента с зоной нечувствительности, выход которого подключен к входу ключевого элемента непосредстьенно и через один ограничитель тока к второму входу интегрального регулятора тока, выход ключевого элемента подключен через другой ограничитель тока к третьему входу интегрального регулятора тока.11293Изобретение относится к автомати- зированному управлению многодвигательными электроприводами механизмов поворота одноковшовых и роторных экскаваторов, отвалообразователей и кранов, имеющих относительно большие значения приведенных к валу двигателя зазоров механических передач и момЕнта инерции механизма (в десять и более раз превышающего суммарный 1 О момент инерции двигателей), оборудованных электроприводами постоянного тока по системе УП-Д со структурой подчиненного регулирования координат.При переходных процессах в ука занных электроприводах неизбежны моменты, когда двигатели не имеют механической связи с маховой массой поворотной платформы, т.е. в зубчатых передачах есть зазор, При этом 20 двигатель может разгоняться до значительных скоростей, накапливать больную кинетическую энергию. В момент зацепления передач .практически вся накопленная кинетическая энергия 25 затрачивается на деформацию зубьев и валов, вызывает существенные динамические нагрузки, что в конечном счете приводит к преждевременному выходу из строя механизмов, снижает З 0 производительность машин. Известно устройство для управления электроприводами механизмов экскаватора, которое содержит последовательно включенные управляемый 35 преобразователь и двигатели постоянного тока в силовой части электро- привода. В системе управления имеются последовательно включенные между собой звено ограничения и интеграль 40 ный регулятор тока, выход которого подключен к входу управляемого преобразователя. Для ограничения динамических нагрузок при выборе зазоров в устройстве используется цепь регу 45 лирования уровня отсечки звена ограничения, подключенная через пороговый элемент к датчику тока якоря электродвигателей 1 ."Однако данное устроиство не учия 50 тывает равномерность окончания выборазазоров двигателями в многодвигательном приводе. В результате после окончания выбора зазоров в .передачах первого двигателя этот двига тель останавливается, а к второму двигателю, в передачах которого зазоры еще открыты, прикладывается 01 2все напряжение преобразователя иускорение этого двигателя увеличивается в два раза. Существенно возрастают и динамические нагрузкив момент окончания выбора зазоров впередачах второго двигателя,Известно устройство для управления процессом выбора зазоров меха,нических передач в двухдвигательном"электроприводе поворота экскаватора,содержащее; датчик тока, ключевойэлемент, звено ограничения, выходомподключенное к первому входу интегрального регулятора тока, выход которого соединен с входом управляемого преобразователя, выходы которогоодин непосредственно, а другой через датчик тока подключены к последовательно соединенным двигателям 2Недостатком этого устройства является то, что применение датчиковускорения двигателей требует наличияна валу каждого двигателя техогенератора или применения устройств вычисления ЭДС двигателей, которая припостоянстве потока дает информациюо скорости. Тахогенератор не нашелприменения в серийных экскаваторныхэлектроприводах ввиду его недостаточной надежности в специфическихтяжелых условиях эксплуатации экскаваторов, Однако при любом типе датчика. скорости введение датчиков ускорений, которые призваны диЬеренциравать медленно меняющиеся сигналы, имеющие частоту в десятые долигерца и высокочастотные помехи, существенно снижает помехозащищенностьи, следовательно, надежность приводав целом. Этот недостаток особенноважен для систем электроприводаТП-Д.Цель изобретения - повышение надежности работы устройства. Указанная цель достигается тем,что устройство для управления процессом выбора зазоров механическихпередач в двухдвигательном электроприводе поворота экскаватора, содержащее датчик тока, ключевой элемент, звено ограничения, выходом подключенное к первому входу интегрального регулятора тока, выход которого соединен с входом управляемого преобразователя, выходы которого один непосредственно, а другой через датчик тока подключены к последовательно соединенным двигателям, снабЗона нечувствительности характеристики вход-выход нелинейного элемента 11 устанавливается примерно равной сигналу динамической ошибки при максимальном рабочем ускорении механизма. Сигнал динамической ошибки с выхода звена 1 ограничения поступает по основной цепи управления на инвертирующий вход, а также через нелинейный элемент 11 с зоной нечувствительности по двум вспомогательным цепям управления через ключ 10 с последовательно включенным ограничителем тока и через ограничитель 12 тока на второй и третий входы интегрального регулятора 2 тока.Любое управляющее воздействие со стороны приводит к такому изменению 3 112930 жено датчиком напряжения управляемого преобразователя, датчиком напряжения одного из двигателей, компаратором, нелинейным элементом с зоной нечувствительности и двумя ограничи 5 телями тока, выходы датчика напряжения управляемого преобразователя и датчика напряжения одного из двигателей подключены соответственно к первому и второму входам компаратора, выход которого подключен к управляющему входу ключевого элемента, выход датчика тока подключен к входу звена ограничения, выход которого подключен также к входу нелинейного элемента с зоной нечувствительности, выход которого подключен к входу ключевого элемента непосредственно и через один ограничитель тока к второму входу интегрального регулятора тока, выход ключевого элемента подключен через другой ограничитель тока к третьему входу интегрального регулятора тока.На чертеже приведена схема предлагаемого устройства.Устройство для управления процессом выбора зазоров механических передач в двухдвигательном электроприводе поворота экскаватора содержит последовательно включенные звено 130 ограничения и интегральный. регулятор 2 тока, подключенный своим выходом к входу управляемого преобразователя 3. Двигатели 4 и 5 включены последовательно и подключены к выходу 35 управляемого преобразователя 3, к которому подключен также датчик 6 напряжений управляемого преобразователя. Датчик 7 нйприжения двигателя подключен к якорным зажимам двигателя 5. В силовой цепи двигателей включен шунт, к которому подключен датчик 8 тока якоря электродвигателей, выход которого подключен к второму входу звена 1 ограничения. Ком паратор 9 первым входом подключен к датчику 6 напряжения управляемого преобразователя, вторым входом - к датчику 7 напряжения двигателя, а выходом - к управляющему входу ключево го элемента 10, коммутирующая цепь которого связывает выход нелинейного элемента 11 с зоной нечувствительности, второй и третий входы интегрального регулятора 2 тока через 55 ограничитель 12 и 13 тока.Вход нелинейного элемента 11 подключен к выходу звена 1 ограничения,1 4Устройство работает следующим образом.Элементы 1, 2, 3, 4, 5 и 8 представляют собой типовую схему управ- ления экскаваторным электроприводом - астатический подчиненный контур регулирования тока якоря электродвигателей.Звено 1 ограничения осуществляет алгебраическое суммирование сигнала задания на ток и сигнала обратной связи по току, поступающей с датчика 8 тока якоря двигателей, На выходе звена 1 ограничения в пределах линейной части его характеристики вход-выход выделяется сигнал, пропорциональный величине динамичес кой ошибки регулирования тока якоря электродвигателейСтатическая механическая характеристика электропривода имеет экскаваторный вид и, следовательно, практически в течение всего переходного процесса сигнал задания на входе звена 1 ограничения остается неизменным, соответствующим току стопорения. Устройство будет работать наилучшим образом, если ускорение двигателей поддерживается в процессе выбора зазоров постоянным, независимо от порядка окончания выбора зазоров двигателями, и не превышающим рабочего ускорения механизмаВ этом случае в момент окончания выбора зазоров последним во времени двигателем динамическии момент, развиваемый двигателями увеличится минимум в 10 раз и динамическая ошибка уменьшится также, как минимум, в 10 раз.ЗО Окончание процесса выбора зазоров в передачах любого из двигателей вызывает торможение этого двигателя35 до скорости вращения платформы, разность сигналов на входе компаратора 9 становится отличной от нуля, компаратор 9 переключается - на выходе его появляется отрицательный потен 40 циал. Коммутирующая цепь ключевого элемента 10 замыкается, В результате на неинвертирующий вход регулятора 2 тока поступает сигнал по двум па- Р аллельным цепям - через ограничи 45 тель тока 13 и через ключевой элемент 10 и ограничитель 12, Коэффициент передачи по. этому входу возрастает настолько, что обеспечивается вдвое меньший суммарный сигнал0 на входе регулятора 2 тока и, следовательно, вдвое меньший темп изменения напряжения на выходе управляемого преобразователя 3, сохраняя тем самым ускорение двигателя, в переда 55 чах которого зазор еще не выбран, на прежнем уровнеОкончание процесса выбора зазоров в передачах второго двигателя также сигнала на входе контура тока, которое выводит звено 1 ограничения внасыщение. Сигнал динамической ошибки при этом в несколько раз превышает ширину зоны нечувствительности 5 нелинейного элемента 11. На вход регулятора 2 тока поступают сигналы по инвертирующему и неинвертирующему входам, разность их обеспечивает постоянный минимальный темп разгона двух двигателей, одновременно имеющих разомкнутые зазоры в механических передачах.Двигатели 4 и 5 вращаются при этом с одинаковыми скоростями. Ввиду 15 того, что коэффициент передачи датчика 6 напряжения преобразователя устанавливается в два раза меньше коэффициента передачи датчика 7 напряжения двигателя, разность сигна лов датчиков 6 и 7 напряжений, выделяемая на входе компаратора 9, близка к нулю. На выходе компаратора под действием напряжения смещения имеется положительный потенциал, ко торый попадает на управляющий вход ключевого элемента и поддерживает его коммутирующую цепь в разомкнутом состоянии. На неинвертирующий вход сигнал поступает в этом режиме только через ограйичитель 13 тока.1 приводит к торможению этого двигателя до скорости вращения платформы. Двигатели начинают вращаться с приблизительно одинаковыми скоростямии напряжения на двигателях выравниваются.,Коммутирующая цепь управляемого ключевого элемента 10 размыкается, Задание, поступающее на регулятор 2 тока, возрастает вдвое, увеличивается вдвое темп изменения напряжения преобразователя, а ускорение двигателей в начальный момент останется минимальным, необходимым для мягкого выбора зазоров. Однако это будет длиться доли секунды, так как момент инерции вращающихся частей механизма, связанных с валом двигателей, увеличился минимум в10 раз, следовательно, в 10 раз уменьшится динамическая ошибка. Сигнал на выходе звена 1 ограничения станет мал-меньше эоны нечувствительности нелинейного элемента 11. Сигнал по вспомогательной цепи управления перестанет проходить на неинвертируюций вход регулятора 2 тока. Задание на входе регулятора тока увеличится до рабочего и ускорение дви-, гателей также возрастет до рабочего.При следующем изменении сигнала управления и открытии зазоров в зубчатых передачах процесс повторяется.Эффективность изобретения заклю-,чается в повышении производительности. машины, Так, применяемые устройства управления процессом выбора зазоров для обеспечения допустимых динамических нагрузок при любых начальных условиях процесса настраиваются на наихудший вариант начального расположения зубьев шестерен, когда один зазор полностью закрыт, а другой - полностью открыт. Темп изменения напряжения преобразователя при выборе зазоров всегда поддерживается минимальным и не регулируется, В то же время, если оба зазора открыты полностью при тех же динамических нагрузках, темп изменения напряжения преобразователя можно было бы увеличить вдвое и сократить длительность процесса в 2 раза. Предлагаемое устройство обеспечивает регулирование темпа изменения напряжения преобразователя и способно обеспечитьсокращение длительности процесса в ъ 3сРеднем в- раз.1 21129301 Наз аркина ставитель хред М.Над едактор И.Ковач тор О. Билак о 643Подписноественного .комитета СССРбретений и открытий/23 Тираж ВНИИПИ Госуда по делам из 3035, Москва, Филиал ППП "Патент", г. Ужгород, ул. Проектная Для мощных экскаваторов-драглайнов длительность процесса выбора зазоров доходит до 57, длительности цикла экскавации. Таким образом, в случае, если.длительность поворотных движений экскаватора превышает длительность подъема ковша на выгрузку и опускание в забой (низкий отвал, угол поворота платформы больше 120 ф), сок 43ращение длительности поворота в-12раз обеспечивает увеличение произ водительности экскаватора на 17,.Учитывая возможные отклонения отуказанных условий, применение предлагаемого устройства обеспечиваетувеличение производительности экскаватора на 0,573
СмотретьЗаявка
3615476, 04.07.1983
МОСКОВСКИЙ ОРДЕНА ЛЕНИНА И ОРДЕНА ОКТЯБРЬСКОЙ РЕВОЛЮЦИИ ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ, ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "НОВО-КРАМАТОРСКИЙ МАШИНОСТРОИТЕЛЬНЫЙ ЗАВОД"
КЛЮЧЕВ ВЛАДИМИР ИВАНОВИЧ, ОСТРИРОВ ВАДИМ НИКОЛАЕВИЧ, ДАНЧЕНКОВ АЛЕКСАНДР АНДРЕЕВИЧ, КАЛАШНИКОВ ЮРИЙ ТИМОФЕЕВИЧ, КОШЕВОЙ МИХАИЛ МАКСИМОВИЧ, ПУЗАНОВ ВАДИМ ИВАНОВИЧ
МПК / Метки
МПК: E02F 9/20
Метки: выбора, двухдвигательном, зазоров, механических, передач, поворота, процессом, экскаватора, электроприводе
Опубликовано: 15.12.1984
Код ссылки
<a href="https://patents.su/5-1129301-ustrojjstvo-dlya-upravleniya-processom-vybora-zazorov-mekhanicheskikh-peredach-v-dvukhdvigatelnom-ehlektroprivode-povorota-ehkskavatora.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления процессом выбора зазоров механических передач в двухдвигательном электроприводе поворота экскаватора</a>
Измерительный преобразователь для подключения реле защиты трансформатора и реактора

Номер патента: 1029307
Опубликовано: 15.07.1983
Авторы: Бики, Горбунцов, Жгутов, Засыпкин, Рогачевский, Шафир
МПК: H02H 7/04
Метки: защиты, измерительный, подключения, реактора, реле, трансформатора
...каждой группы катушек в рабочем режиме объекта было близко к нулю. Измерительные катушки 5 и 6, 7 и 8 45 соединяются встречно, как на фиг. 1 и 3, ес 50 ли знаки их потокосцеплений одинаковы, и согласно, как на фиг. 2 и 4, если знаки их потокосцеплений разные. В свою очередь, потокосцепление измерительной катушки зависит от конструкции рабочих обмоток 55 объекта защиты. Напряжение каждой группы измерительных катушек близко к нулю и в других режимах неповрежденного объекта, например, при внешних коротких замыканеповрежденного трансформатора или реактора, и релейная защита, подключенная кизмерительной обмотке, не действует. Комбинация обмоток с катушками, расположенными по одну или по разные стороны отсредней линии рабочих обмоток...
Устройство для управления вентильным преобразователем переменного напряжения в постоянное с реактивным энергонакопителем на выходе

Номер патента: 1252881
Опубликовано: 23.08.1986
Авторы: Колоколкин, Легу, Мотыль, Сергеев
Метки: вентильным, выходе, переменного, постоянное, преобразователем, реактивным, энергонакопителем
...31 имеется нулевой потенциал,а на всех остальных выходах - единичный потенциал, Для определенности будем считать, что нулевой потенциал имеется на одном из входов ЗОэлемента 26 (диаграмма 73). Так какпри срабатывании блока защиты блокировка по входам 35 с элементов 2628 снимается (диаграмма 72), то навыходе 53 элемента 26 (диаграмма 74)появится нулевой потенциал, которыйобеспечивает включение Формирователей 14 управляющих импульсов вентилей ЗЗ одной фазы преобразователя 3. При этом управляющие импульсыпопадутся на вентили той фазы (вданном случае вентили 33), один извентилей которой находился в прово"дящем состоянии перед срабатываниемблока защиты.Таким образом, при отКлючЕНиивентильного преобразователя, когда2881 а 5 10 5 20 25...
Устройство для ограничения крутящегомомента ha валу асинхронного электро-двигателя

Номер патента: 817955
Опубликовано: 30.03.1981
Авторы: Прошин, Сашкин, Тукмаков
МПК: H02P 5/28
Метки: асинхронного, валу, крутящегомомента, ограничения, электро-двигателя
...выход которого связан с входом коммутатора.На чертеже приведена структурная схема, устройства.Устройство для ограничения крутящего момента на валу электродвигателя содержит асинхронный двигатель 1, трансформатор 2 напряжения, трансформатор 3 тока, задатчик 4 уровня, фазовращатель 5, формирователь 6 временного интервала, фазовременной преобразователь 7, схему 8 И, триггер 9.Электродвигатель 1 через трансформатор 3 тока и коммутатора 10 включен в трехфазную питающую сеть, к двум фазам которой подключен трансформатор 2 напряжения. Выход трансформатора 2 напряжения подключен к первым входам формирователя 6 временного интервала, фазовременного преобразователя 7 и ко входу задатчика 4 уровня, выход которого подсоединен ко второму входу...
Устройство для управления однотактным преобразователем постоянного напряжения

Номер патента: 1720134
Опубликовано: 15.03.1992
МПК: H02M 7/539
Метки: однотактным, постоянного, преобразователем
...клеммой 11 источника питания, кроме того,выход компаратора 9 подключен к второмувходу схемы ИЛИ 7. Параллельные входыуправляемого делителя 6 частоты служатдля подачи кода управления 12,40 Устройство работает следующим образом.Задающий генератор 1 вырабатываетимпульсы прямоугольной формы (фиг,2 а),частота следования которых 1 зг = ЙЬ, где45 М - коэффициент деления двоичного счетчика 2: 1 и - частота преобразования инвертора.Эти импульсы поступают на входы длясчета на уменьшение двоичного счетчика50 2 и управляемого делителя 6 частоты,разрядность которых выбирается так,чтобы обеспечить необходимую частотупреобразования и необходимую погрешность формирования длительности широт 55 но-модулированного импульса.В начальный момент времени на...
Устройство для формирования импульсов управления транзисторным преобразователем

Номер патента: 1781787
Опубликовано: 15.12.1992
Автор: Ковальчук
МПК: H02M 1/08
Метки: импульсов, преобразователем, транзисторным, формирования
...в единичное состояние, обеспечивая включение силового транзисторного ключа (момент времени с эпюра ж на фиг.2). Длительность импульса Т 2 определяется длительностью переходного процесса в силовом транзисторном ключе при его включении, т.е. одновибратор 5 формирует импульс взвода длительностью Т 2 и определяет ограничение регулирования снизу (момент времени т 1-12 эпюра ж на фиг.2), обеспечивая плавный запуск преобразователя. На вход интегратора 2 поступает напряжение с выхода датчика выходного напряжейия, Выходное напряжение интегратора 2 (эпюра д на фиг,2) поступает на первый вход компаратора 6, на второй вход которого поступает напряжение от источника управляющего напряжения 3. При равенстве входных нап ряжений (момент времени...
Предыдущий патент: Привод рабочего органа землеройной машины
Следующий патент: Гидросистема управления рабочим процессом бульдозера
Случайный патент: Вакуумный натекатель