Программное управляющее и контролирующее устройство
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
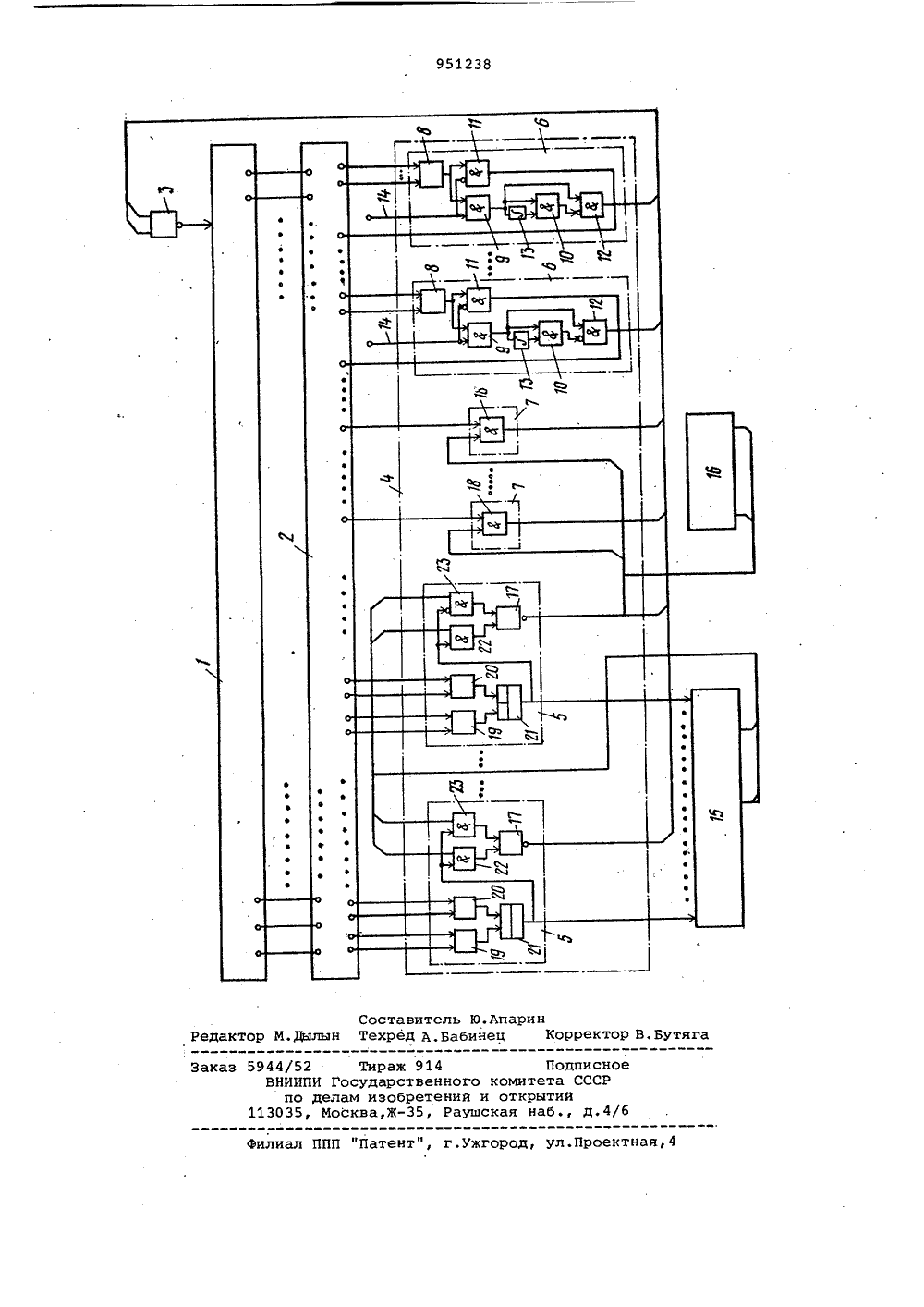
ОПИСАНИЕ ИЗОБРЕТЕНИЯ Союз СоветскикСоциалистическихРеспублик(22) Заявлено 10.06.80 (21) 2941249/18-24 (31 М.КП,З . С 05 В 19/08 с присоединением заявки Мо -(23) Приоритет -Государственный комитет СССР по делам изобретений и открытий) Заявитель 4 ПРОГ Е УПРАВЛЯЮЩ УСТРОЙСТВО КОНТРОЛИРУЮЩЕ 2 оты, а йством опления йство о числом производираций. Кроме тогоеменной ошибкидает низкой надежцикла ра мах устр иэ-за нао устр стью.Целью ние и по эт но Изобретение относится к автома тическому управлению и может быть использовано для циклового управл ния робототехническими комплексаИзвестны программные управляющие. устройства, построенные по стандартной позиционной структуре и содержащие блок логических условий, соединенный через блок обегания с блоком выходов, который в свою очередь связан с объектом управления, а также датчики контроля состояния объекта управления, соединенные с блоком логических условий1).К недостаткам данных устройств относятся сложность конструкции и невозможность оперативного программирования работы.Наиболее близким к изобретению является программное управляющее устройство, содержащее блок обегания, выходы которого через блок набора программы соединены со входами блока формирования управляющих сигналов 2Это устройство функционирует по временной программе и содержит требующий больших аппаратурных затрат блок обегания, так. как число его ячеек обусловлено продолжительностью зобретения является упрощеышениенадежности устройстУказанная цель достигается ф;ем,что программное управляющее и контролирующее устройство, содержащееблок обегания, выходы которого соединены.с первыми входами блока наборапрограммы, и блок формирования управ ляющих сигналов, который содержит почислу управляемых объектов узлы формирования команд, каждый из которыхсостоит иэ двух первых элементов ИЛИи триггера, выход которого соединенсо входом соответствующего управляемого объекта, а входы - с выходамипервых элементов ИЛИ, входами под"ключенных к первым выходам блока набора программы, содержит первый.эле мент ИЛИ-НЕ, а блок формированияуправляющих сигналов содержит почислу контролируемых объектов узлыподтверждения состояний контролируемых объектов, каждый из которых 30 состоит из первого элемента И, и почислу условных переходов программы узлы условных переходов, каждый иэ которых состоит из второго элемента ИЛИ, первого и втррого элементов ЗАПРЕТ, второго и третьего элементов И и интегратора, а в каждый узел фор мирования команд введены третий элемент ЗАПРЕТ, четвертый элемент И и второй элемент ИЛИ-НЕ, причем первый вход первого элемента И соединен с выходом соответствуюцего контролируеО мого объекта, выход второго элемента ИЛИ соединен с первым входом второго элемента И и с прямым входом первого элемента ЗАПРЕТ, выход Которого сое-, ,динен со вторым входом блока набора программы, выход второго элемента И - с первым входом третьего элемента И и прямым входом второго элемента ЗАПРЕТ, а через интегратор - со вторым входом третьего элемента И,выход которого соединен с инверсным входом второго элемента ЗАПРЕТ, первый вход четвертого элемента И и инверсный вход третьего элемента ЗАПРЕТ соединены с выходом триггера, второй и прямой входы - с выходами соответствующих управляемых объектов, а вы- ходы - со входами второго элемента ИЛИ-НЕ, входы первого элемента И и второго элемента ИЛИ соединены со вторыми выходами блока набора програм 0 мы, выходы первого элемента И,вторых элементов ИЛИ-НЕ и ЗАПРЕТ соединены со входами первого элемента ИЛИ-НЕ, а соединенные между собой инверсный вход первого элемента ЗАПРЕТ и вто рой вход второго элемента И подключены ко входу блока формирования управляющих сигналов.Включение узлов формирования команд в структуру блока формирования 40 управляюцих сигналОв позволяет существенно уменьшить число ячеек в блоке обегания, а также перейти от задания временных интервалов между отдельными тактами к заданию перехо да от одного такта к другому по отработке управляюцих воздействий. При этом описание работы устройства может быть составлено на языке относительно крупных обобценных технологических команд, расшифровка которых производится с помоцью узлов формирования команд, каждый из которых управляет объектом управления и выдает сигнал квитирования об окончании выполнения команды управления объектом. Управляемыми объектами могут быть пневмо- или гидроцилиндры с распределителями и конечными выключателями, гидродвигатель, электродвигатель и т,д. Состояние тако го управляемого объекта постоянно контролируется узлом формирования команд. Каждый узел формирования команд может быть многократно использован в течение цикла, что приводит 65 к суцественной экономии аппаратуры. Включение узлов условных переходов позволяет простыми средствами реализовать альтернативные продолжения в алгоритме управлйнйй, а узлов подтверждеНия состояний контролируемых объектов - осуществлять . информационную связь с контролируемыми объектами, состояние которыхконтролируется не постоянно, а только в некоторые, заранее заданные,моменты цикла. Введение узлов формирования команд позволяет упроститьотладку и доводку устройства, поиски устранение неисправностей. Крометого, достаточно просто изменениемчисла узлов формирования команд расширить или сократить число управляемых объектов, что часто встречается в процессе автоматизации технологического оборудования. На чертеже показана структурная схема программного управляюцего и контролирующего устройства.Программное управляющее и контролирующее устройство содержит блок 1 обегания, блок 2 набора программы, первый элемент ИЛИ-НЕ 3 и блок 4 формирования управляющих сигналов, состояций из узлов 5 формирования команд, узлов 6 условных переходов и узлов 7 подтверждения состояний контролируемых объектов. Каждый узел 6 содержит первый элемент ИЛИ 8, второй и третий элементы И 9 и 10, первый и второй элементыЗАПРЕТ 11 и 12, интегратор 13 и первые входы 14.Позицией 15 на чертеже обозначена совокупность управляемых объектов, которые управляются и контролируются в каждом такте алгоритма управления. Каждому объекту управления 15 поставлен в соответствие свой узел 5 формирования команд.Позицией 16 на чертеже обозначена совокупность контролируемых объектов, поведение которых контролируется изредка, по мере необходимости. Состояние контролируемых объектов контролируется с помоцью узлов 7подтверждения состояния контролируемых объектов. Узел 5 содержит второй элемент ИЛИ-НЕ 17. Каждый узел 7 подтверждения состояния контролируемого объекта содержит первый элемент И 18, Каждый узел 5 формирования команд содержит первые,многовходовые элементы ИЛИ 19 и 20, триггер с раздельными входами 21 и четвертый элемент И 22, третий элементЗАПРЕТ 23.Процесс настройки и программирования предложенного программного управляющего и контролирующего устройства заключается в следуюцем: по числу управляемых объектов выбирается число узлов 5 формирования команда по числу контролируемых объектовчисло узлов 7 подтверждения состояния контролируемых объектов. В зависимости от чиста тактов в алгоритме управления выбирается числоточек обегания в блоке 1 обегания.В каждом такте в блоке 1 обеганиявозбуждается одна из его ячеек и наее выходе появляется единичный сигнал, который поступает на блок 2 набора программы. С помощью блока 2набора программы выход ячейки блока1 обегания соединяется со входамиэлементов ИЛИ 19 и 20 тех узлов 5формирования команд, состояние которых необходимо изменить в этом такте, и со вторыми входами элементовИ 18 тех узлов 7 подтверждения состояния контролируемых объектов, которые в данном такте должны проконтролировать свой контролируемый объект 16. Узлы 5 формирования команд,на которые поступают команды в рассматриваемом такте, изменяют своесостояние, которое запоминаетсятриггером 21. Информация об изменен,ном состоянии узла 5 формированиякоманд поступает с выхода триггера21 на управляемый объект 15. Так как,объекту 15 потребуется некотороевремя для отработки команды, то втечение всего этого времени состояние объекта 15 не соответствует состоянию им управляющего узла 5.Информация о состоянии. объекта 15 поступает на входы элементов И 22 иЗАПРЕТ 23 узла 5.Если состояние объекта 15 не соответствует состояниюузла 5, то на выходе элемента ИЛИ-НЕ17 имеет место сигнал рассогласования - логическая единица. Если состояние объекта 15 соответствуетсостоянию узла 5, тогда на выходеэлемента ИЛИ-НЕ 17 имеет место нулевой сигнал. Таким образом, покавсе управляемые объекты 15, на которые поступают в рассматриваемом такте команды управления, их не исполнят, на выходах элементов ИЛИ-НЕ 17соответствующих им узлов 5 формирования команд имеют место единичные сигналы, Если блок 4 формирования управляющих сигналов содержит толькоузлы 5 формирования команд (узлы 6условных переходов и узлы 7 подтверждения состояния контролируемыхобъектов отсутствуют), тогда, кактолько все возбужденные в рассматриваемом такте узлы 5 отработали заданные в этом такте команды, на выходахэлементов ИЛИ-НЕ 17 всех узлов 5 возникают нулевые команды, поступающиена входы многовходового элементаИЛИ-НЕ 3. В результате на выходеэтого элемента появляется единичныйсигнал, который, поступая на входблока 1 обегания, изменяет его состояние. Наступает следующий такт,характеризующийся появлением единичного сигнала на другом выходе блока1 обегания. На некоторые узлы 5 Формирования команд поступают новыекоманды управления, наступает ситуация рассогласования между состояниями этих узлов 5 и состояниями управляеьых ими объектов. На выходахэлементов ИЛИ-НЕ 17 указанных узлов5 появляются единичные сигналы, а навыходе многовходового элемента ИЛИНЕ 3 соответственно - нулевой сигнал.Начинается переходной процесс в объектах управления 15, который заканчивается появлением единичного сигнала на выходе многовходового эле мента ИЛИ-НЕ 3, что является информацией о выполнении всех команд такта и командой для очередного переключения блока 1 обегания, Если блок4, кроме узлов 5 формирования команд, 20 содержит также узлы б условных переходов и узлы 7 подтверждения состояния контролируемых объектов, то переключение блока 1 обегания происходит только тогда, когда на всех 25 входах элемента ИЛЙ-НЕ 3 появляютсянулевые сигналы. Узлы б используютсядля того, чтобы по внешней командеусловного перехода р, поступающейна первый вход 14, исключить какую либо стадию технологического процесса. Это достигается тем, что выход а блока обегания 1 соединяютчерез блок 2 набора программы с вхо,дом элемента ИЛИ 8 узла 6 условныхпереходов, на первый вход 14 которогоподают команду; а выход элемента1ЗАПРЕТ 11 этого узла соединяют совходом узла 5 Формирования командтакже через блок 2. Если у = О,то единичный сигнал с выхода а чес 40, рез элементы 8 и 11 узла б и черезблок 2 поступает на вход узла 5 формирования команд, что соответствуетисполнению такта, если у = 1, тоуказанная связь блокируется на,эле менте ЗАПРЕТ 11, а на выходе элемента ЗАПРЕТ 12 узла б появляетсякратковременный единичный сигнал,имитирующий переходный процесс в объекте управления. Кратковременный 5 О единичный импульс поступает на входмноговходового элемента ИЛИ-НЕ 3.После исчезновения единичного сигнала на выходе элемента ЗАПРЕТ 12 узлаб на вход блока 1 обегания поступает единичный сигнал, переключающийего в очередную тактовую позицию, Спомощью узла 7 подтверждения состояния контролируемого объекта осуществляется запрос о состоянии какоголибо контролируемого объекта 16. Ес ли состояние контролируемого объекта16 удовлетворяет условию продолжениятехнологического процесса, то на выходе элемента И 18 узла 7 - нулевойсигнал, в противном случае - сигнал 65 единичный, и технологический процессприостанавливается до тех пор, пока состояние запрашиваемого контролируемого объекта не удовлетворяет условию продолжения процесса.Использование данного программного управляющего и контролирующего устройства позволяет осуществить управление робототехническим комплексом простыми и надежными средствами, дает воэможность существенно упростить наладку оборудования и предо- о ставляет эффективные возможности для оперативного изменения алгоритма управления технологическим процессом.Формула изобретенияПрограммное управляющее и контролирующее устройство, содержащее блок обегания, выходы которого соединены с первыми входами блока набора про граммы, и блок формирования управляющих сигналов, который содержит по числу. управляемых объектов узлы формирования команд, каждый из которых состоит из двух первых элементов ИЛИ и триггера, выход которого соединен со входом соответствующего управляемого объекта, а входы - с выходами первых элементов ИЛИ, входами подключенных к первым выходам, блока набора программы, о т л и ч а ю щ е - е с я тем, что, с целью упрошения и повышения надежности устройства, оно ,содержит первый элемент ИЛИ-НЕ, а блок формирования управляющих сигналов содержит по числу контролируемых объектов узлы подтверждения состояний контролируемых объектов, каждый из которых состоит из первого элемента И, и по числу условных переходов программы узлы условных перехо дов, каждый из которых состоит из второго элемента ИЛИ, первого и второго элеМентов ЗАПРЕТ, второго и третьего элементов И и интегратора, а в каждый узел формирования команд введены третий элемент ЗАПРЕТ,четвертый элемент И и второй элемент ИЛИ-НЕ, причем первый вход первого элемента И соединен с выходом соответствующего контролируемого объекта, выход второго элемента ИЛИ соединен с первым входом второго элемента И и с пряьым входом первого элемента ЗАПРЕТ, выход которого соединен со вторым входом блока набора программы, выход второго элемента И - с первым входом третьего элемента И и прямым входом второго элемента ЗАПРЕТ, а через интегратор со вторым входом третьего элемента И, выход которого соединен с инверсным входом второго элемента ЗАПРЕТ, первый вход четвертого элемента И и инверсный вход третьего элемента ЗАПРЕТ соединен с выходом триггера, второй и прямой входы - с выходами соответствующих,управляемых объектов, а выходы - со входами второго элемейта ИЛИ-НЕ, входы первого элемента И и второго элемента ИЛИ соединены со вторыми выходами блока набора программы, выходы первого элемента И, вторых элементов ИЛИ-НЕ, и ЗАПРЕТ соединены со входами первого элемента ИЛИ-НЕ, а соединенные между собой инверсный вход первого элемента ЗАПРЕТ и второй вход второго элемента И подключены ко входу блока формирования управляющих сигналов.Источники информации,принятые во внимание при экспертизе1. Построение пневматических дискретных управляющих устройств на базе аппаратуры системы ЦИКЛ. ИПУ. М., 1973, с.48-50.2. Атлас П.М. и др. Опыт создания пневматического программного устройства управления промышленным роботом. Сб. "Пневматика и гидравлика", вып.7, М., "Машиностроение", 1979, с,156-1 бЗ (прототип).ка илиал ППП "Патент", г.Ужгород, ул.Проектная,/52 Тираж 914 ИИПИ Государственн по делам изобретен 35, Москва,Ж, Р Заказ 5944 ВН ого к Подписноетета СССРрытийнаб., д.4/б
СмотретьЗаявка
2941249, 10.06.1980
ПРЕДПРИЯТИЕ ПЯ М-5671
АТЛАС ПЕТР МАТВЕЕВИЧ, БАРСКИЙ ЕФИМ ОЗЕВИЧ, БЕРЕЗИН ГРИГОРИЙ АБРАМОВИЧ, ВАЙНШЕНКЕР ЭДУАРД АНАТОЛЬЕВИЧ, ВЛАСОВ ВИКТОР ФЕДОРОВИЧ, ЕРШОВ АЛЕКСАНДР АНДРЕЕВИЧ, ПОЧТАРЬ ЮРИЙ САМУИЛОВИЧ, РУДНЕВ ВСЕВОЛОД ВИКТОРОВИЧ, ШЕВЧЕНКО БОРИС СТЕПАНОВИЧ
МПК / Метки
МПК: G05B 19/08, G05B 19/418
Метки: контролирующее, программное, управляющее
Опубликовано: 15.08.1982
Код ссылки
<a href="https://patents.su/5-951238-programmnoe-upravlyayushhee-i-kontroliruyushhee-ustrojjstvo.html" target="_blank" rel="follow" title="База патентов СССР">Программное управляющее и контролирующее устройство</a>
Устройство для формирования команд управления объектами

Номер патента: 765806
Опубликовано: 23.09.1980
Автор: Лукинов
МПК: G06F 9/36
Метки: команд, объектами, формирования
...элемент 5 И и синхроимпульсы поступают на вход счетчика 7 времени. В моменты совпадения кодон времени, поступающих из блока 2, с кодами текущего времени, зафиксированных на счетчике 7 времени, схема б сравнения кодов времени выдает н узел 3 управления блока 2 импульсы, по которым производится считывания содержимого ячейки оперативной памяти блока 2, н результате чего коды команд поступают на узлы управления блоков 2, 9 и 16.При поступлении кода команды на блок 9 его узел 10 управления вырабатывает импульс, по которому открывается элемент 12 И второго блока 4 и импульсы генератора 8 поступают на вход счетчика 7 времени, В моменты совпадения кодов времени, поступающих из блока 9 , с кодами времени, поступающих от счетчика 11,...
Микропрограммное устройство для формирования команд управления объектами и контроля их исполнения
Номер патента: 1239714
Опубликовано: 23.06.1986
Авторы: Балакирев, Волков, Пересыпкин, Поротов
МПК: G05B 19/18, G06F 9/22
Метки: исполнения, команд, микропрограммное, объектами, формирования
...на выходе24 - микрооперация, обнуляющая счетчик 11, а на выход 18,2 поступаетвнутренняя микрооперация опроса элементов И 132 и И 14.2, На выходеблока 8 появляется сигнал, выбирающийсоответствующий элемент И 9, Еслиобъект вовремя выполняет заданнуюему команду то очередной сигнал поступает на вход 16.2 и устройство вы идает очередные штатные команды,При этом на шину 18.1 с регистра7 поступает микрооперация опроса элемента И 13.1, на другой вход 16,1которого приходит с блока 1 запускающий устройство сигнал, При совпадении этих двух сигналов на выходе элемента И 13,1 появляется сигнал, который поступает на вход элемента 15постоянной памяти адреса, которыйпреобразует этот сигнал в код адреса ячейки блока 6 постоянной памяти,Код с выхода...
Устройство для формирования команд телеконтроля и телесигнализации

Номер патента: 561212
Опубликовано: 05.06.1977
Авторы: Воробьев, Загороднов
МПК: G08C 15/06
Метки: команд, телеконтроля, телесигнализации, формирования
...ИЛИ, выходы второго и четвертого элементов И- ко входам второго элемента ИЛИ,а выходы элемен ов ИЛИ - ко второму и третьемувходам блока считывания соответственно.Блок-схема предлагаемого устройства приведена на чертеже,Устройство содержит генератор 1, распределитель 2,кодопреобразователь 3, счетчик регистров 4,счетчик позиций 5, блок управления счетчиком ре.гневов 6, блок управления счетчиком позиций 7,дешифратор регистров 8, дешифратор позиций 9,дешифратор ложной команды 10, элементы И11, - 11, элемент НЕ 12. элементы ИЛИ 13, - 13,блок считывания 14 и блок приема команд ТУ 15,Устройство. работает следующим образом,С началом сеанса телеуправления сигналом разрешения дешифрованкя команд ТУ, образующимсяв блоке приема команд ТУ 15...
Устройство для формирования команд телесигнализации

Номер патента: 551685
Опубликовано: 25.03.1977
Авторы: Захарченко, Леперт, Лернер
МПК: G08C 19/28
Метки: команд, телесигнализации, формирования
...течеуправления.На черетеже приведена структурная схема уст.рой ства.Устройство содержит распределитель 1, шифра.тор 2 команд телесигнализации, элементы И 31 -Зп, блок управления 4, блок 5 приема команд теле.управления, коммутатор 6, счетчик 7 циклов телесигнализации, счетчик 8 времени задержки,Распределитель 1 образует последовательностьуправляющих импульсов для устройства. Шифра.тор 2 команд телесигнализации формирует кодовые.комбинации, соответствующие состоянию органовуправления объекта, а элементы И 31 3, которыми управляет коммутатор 6, определяют момечты начала и конца шифрования команд телесигналиэации, Последовательностью шифрации команд те.ле сигнализации управляет блок управления 4.В исходном состоянии выход...
Устройство для формирования команд управления

Номер патента: 526938
Опубликовано: 30.08.1976
МПК: G08C 19/02
Метки: команд, формирования
...сигчалов контролируемых параметров; 4, -44- - датчики сигналов нижних уставок Фтн; )51 - 5, - датчики контролируемых параметров (1.1 х, ); 6, - 6 - датчики верхних уставок (l ц) для гг каналов соответственно; 7 - генератор напряжения пилы (1,1); 8, 9, 10 - первый, второй и третий нуль- органы; 11 - формирователь импульсов датчиков контролируемых параметров; 12 - формирователь импульсов датчиков нижних уставок; 13 - формирователь импульсов датчиков верхних уставок; 14, 15 - первый и второй элементы ИЛИ; 16, 17 - первые и вторые триггеры; 18, 19 - дифференцирующие элементы; 20, 21 - первыи и второи элементы И; 22 - первый элемент И,11 И - НЕ; 23 - третин триггер; 24 - шина импульсов кадровой синхронизации 1; 25 - делитель частоты...
Предыдущий патент: Система автоматической оптимизации
Следующий патент: Устройство для программного управления объектом
Случайный патент: Способ получения волластонита