Устройство для автоматизированного управления тяговым агрегатом транспортного средства в процессе его загрузки сыпучим материалом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 867822
Авторы: Верещагин, Ворончук, Печковский, Рудык




Текст
ОП ИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоввтсникСоциалистическиеРеспублик ц 867822(5)М. Кл,В 65 6 67/22 Ъеударстеанай кемитет СССР ае делам кэавретелкй и открытей(71) Заявнтел евский институт автоматики им. ХХ(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТЯГОВЬй АГРЕГАТОМ ТРАНСПОРТНОГО СРЕДСТВА В ПРОЦЕССЕ ЕГО ЗАГРУЗКИ СЫПУЧИМ МАТЕРИАЛОМ ВИзобретение относится к промьввлеиному транспорту, в частности к устройствам управления движением транспортных средств в процессе погрузки сыпучего материала, непрерывно подаваемого конвейером, например, в по-лувагоны магистрального железнодорожного транспорта, и может быть использовано на открытых разработках.полезных ископаемых, на стационарных пунктах и при погрузке водного транспорта сыпучим материалом.По основному авт. св. 1 Р 757446 известно устройство.для автоматизированного управления тяговым агрегатом транспортного средства в процессе его.15 загрузки сыпучим материалом, содержащее измеритель интенсивности потока материала загрузочного конвейера с преобразователем в частотно-модулироЗЮ ванный сигнал и соединенный с его выходом блок задания линейной плотности материала, модуль потока и блок индикации текущих координат заданного положения тягового агрегата, формирователь импульсов и импульсный генератор ввода начальных координат, один из выходов которого соединен с основ" ным входом модели потока текущих координат заданного положения тягового агрегата, сдвнговый вход которой соединен с выходом формирователя импульсов, а выход - с блоком ищтикации текущих координат заданного положения тягового агрегата, причем входы формирователя импульсов соединены с выходами импульсного генератора ввода начальных координат и блока задания линейной плотности материала. Модель потока текущих координат заданного положения тягового агрегата выполнена в виде регистра сдвига, а блок за- дания линейной плотности материала содержит делитель частоты и коммутатор, подключенный к управляющему входу делителя частоты 11.Недостатком этого устройства является низкая эффективность эагруз867822 20 25 30 Э 5 40 45 50 55 ки транспортного средства вследствиесубьективной ошибки, возникающей при.сравнении заданных координат положения тягового агрегата с фактическимв различных масштабах,Цель изобретения - повышение эффективности загрузки.Указанная цель достигается тем,что блок индикации текущих координат заданного положения тягового агрегата выполнен на источниках света,расположенных на табло последовательно между собой, а устройствоснабжено соединенными последовательно блоком вычисления фактическойскорости тягового агрегата, модельюн блоком индикации координат фактического положения тягового агрегата,выполненным на источниках света; расположенных на табло последовательномежду собой, а каждый из них - наодной линии визирования с соответствующими источниками света блока индикации текущих координат заданного положения тягового агрегата.Иодель фактического положения тягового агрегата может быть выполнена.в виде циклического регистра сдвига,выходы ячеек которого подключены кисточникам света блока индикации координат фактического положения тяговогоагрегага,Кроме того, регистр сдвига моделипотока текущих координат заданногоположения тягового агрегата может бытьвыполнен циклическим,;На чертеже представлена функциональная схема устройства.На загрузочном конвейере 1 установлен частотный измеритель 2 интенсивности потока материала, которыйсостоит из первичных преобразователей - измерителя погонной нагрузки,датчика скорости движения конвейерной ленты и датчика угла наклона конвейераи вторичного прибора - преобразователя 3 в частотно-модулированный сигнал. Выход измерителя 2 интенсивности потока материала подключенко входу блока 4 задания линейнойплотности материала, содержащего уп-равляемый коммутатор 5. и делитель6 частоты, вйход которого соеднней содним нз входов формирователя 7 импульсов. Другой вход формирователя 7импульсов подключен к одному из выходов импульсного генератора 8, другой выход которого соединен со входоммодели потока текущих координат за 4данного положения тягового агрегата 9, выполненной в виде циклического ре- . гистра 1 О сдвига, Сдвиговый вход регистра 10 сдвига подключен к выходу . формирователя 7 импульсов. Выходы ячеек регистра 10 сдвига соединены через коммутатор 1 со входом блока индикации текущих координат заданного положения тягового агрегата 9, выполненного в виде источников 12 света, расположенных на табло последовательно, например, по окружности. Модель фактического положения тягового агрегата 9 выполнена в виде циклического регистра 13 сдвига, сдвиговый вход которого подключен к выходу блока 14 вычисления фактической скорости тягового агрегата 9. Выходы ячеек регистра 13 сдвига соединены через.коммутатор 15 со входом блока индикации координат фактического положениятягового агрегата 9, выполненного ввиде источников 16 света, расположенных на табло последовательно, например, по окружности, концентричной с первой. Источники 12 и 16 света, отражающие равнозначную информацию о заданном и фактическом положении тягового агрегата 9, расположены на одних радиусах.Устройство работает следующим образом.При движении потока материала по конвейеру 1 и далее через разгрузочный бункер в зону погрузки измеритель 2 интенсивности потока матерна" ла вырабатывает модулированный нмпульснцй сигнал, пропорциональныйинтенсивности потока, Указанный сигнал поступает в блок 4 задания линейной плотности материала, где коммутатор 5, с помощью которого задается линейная плотность материала,подлежащего размещению в транспортных средствах, управляет делителем 6частоты. В результате деления значения интенсивности на значение линейной плотности материала, подлежащегоразмещению в транснортнцх средствах,появляется сигнал, соответствующийзаданной скорости движения. тяговогоагрегата 9. Этот сигнал поступает в формирователь 7 импульсов. Предвари-.тельно введенная с помощью импульсного генератора 8 информация в одну иэ ячеек регистра 10 сдвига смещается на один шаг по мере поступления на соединенные параллельносдвиговые входы ячеек каждого следую867822 10 формула изобретения щего импульса, поступающего с выхода Формирователя 7 импульсов, При этом текущее положение информации в регистре 10 сдвига соответствует в установленном масштабе текущему значению интегрального количества(по массе) материала, поданного для погрузки, т.е. моделируется заданное текущее положение транспортного сред-. ства, соответствующее интегральному количеству материала, поданного для погрузки. Состояние ячеек регистра 10 сдвига, т.е. текущее значение координат заданного положения тягового агрегата 9, отображается соответствующими источниками 12 света. Одновременно с этим сигнал, который формируется на выходе блока 14 вычисления Фактической скорости тягового агрегата 9, управляет реверсивным сдвигом информации в регистре 13 сдвига, состояние ячеек которого отображается соответствующими иточииками 16 света блока индикации координат фактического положения тягового агрегата 9.При совпадении Фактического положения тягового агрегата 9 и заданного включенные соответствующие источники 12 и 16 света находятся на одном радиусе концентрических окружностей. В противном случае необходимо изменить положение тягового агрегата 9 таким образом, чтобы включенные ис.- точники 12 и 16 света, индицирующие заданное и фактическое положения, оказались на одном радиусе концентричес ких окружностей.Для прогнозирования бртуации в зоне загрузки служит информация о скорости изменения координат заданного и фактиеского положений тягового аг" регата. Эти величины представляются в форме угловых скоростей вращательного движения соответствующих светя" щихся элементов на концентрических, окружностях, в центре которых уста" новлен постоянно светящийся источник света, ФВыполнение моделей потока текущих координат заданного .и фактического положений тягового агрегата дает возможность использовать многообходный бметод дистанционной передачи йнформации и получать наглядную информацию для оперативного и точного управления тяговым агрегатом в течение всего процесса загрузки, что позволяет повысить эффективность загрузки транспортного средства и равномерно разместить в нем груз. Устройство для автоматизированного управления тяговым агрегатом 1 З транспортного средства в процессе егозагрузки сыпучим материалом по авт.св. В 757446, о т л и ч а ю щ е е с ятем, что, с целью повыщения эффектив.ности загрузки, блок индикации текущих координат заданного положениятягового агрегата выполнен на источниках света, расположенных на таблопоследовательно между собой, а устройство снабжено соединенными последовательно блоком вычисления фактической скорости тяговогс агрегата, мо"делью и блоком индикации координатфактического положения тягового агрегата, вынолнениьии на источниках света, расположенных иа табло последовательно между собой, а каждый изиих - на одной линии визирования ссоответствующими источниками светаблока индикации текущих координатзаданного положения тягового агрегата.2. Устройство по и. 1, о т л ич а ю щ е е с я тем, что модель фактического положения тягового агрегата 40выполнена в виде циклического регистра. сдвига, выходы ячеек которого подключены к источникам света блока индикации координат фактического положе"щея тягового агрегата. 4 з 3Устройство по пп. 1 и 2 о тп н ч а ю щ е е с я тем, что регистр сдвига модели потока текущих координат,заданного положения тягового.агрегата выполнен циклическим.50 Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССРУ 757446, кл. В 65 6 б 7/22, 1977акаэ 8210/ венного ретений аушск ал ППП "Патент", г. Ужгород, ул. Проектн Тираж 845 ВНИИПИ Государс по делам изо 13035, Москва, Ж
СмотретьЗаявка
2858072, 25.12.1979
КИЕВСКИЙ ИНСТИТУТ АВТОМАТИКИ ИМ. ХХУ СЪЕЗДА КПСС
ВЕРЕЩАГИН ЛЕОНИД АРКАДЬЕВИЧ, ПЕЧКОВСКИЙ РОМУАЛЬД ПЕТРОВИЧ, РУДЫК ИРИНА ВАСИЛЬЕВНА, ВОРОНЧУК БОРИС МИХАЙЛОВИЧ
МПК / Метки
МПК: B65G 67/22
Метки: автоматизированного, агрегатом, загрузки, материалом, процессе, средства, сыпучим, транспортного, тяговым
Опубликовано: 30.09.1981
Код ссылки
<a href="https://patents.su/4-867822-ustrojjstvo-dlya-avtomatizirovannogo-upravleniya-tyagovym-agregatom-transportnogo-sredstva-v-processe-ego-zagruzki-sypuchim-materialom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для автоматизированного управления тяговым агрегатом транспортного средства в процессе его загрузки сыпучим материалом</a>
Устройство определения координаты положения объектов

Номер патента: 629450
Опубликовано: 25.10.1978
Автор: Отто
МПК: G01B 19/34
Метки: координаты, объектов, положения
...воздушного подшипника 19, образуемого воэ духом иэ отверстий 4 каналов 3. 35Матрица может содержать разлитое число рядов фотоэлементов. Возможно ис пользование фотоприемников, расположенных в форме растра.На фиг. 2 показана матрица, состоя- Э щая из четырех рядов, горизонтальных, 21, 22, 23 и черытех рядов вертщальных, 25, 26, 27, размещенных под прямым углом один к другому. Размеры фотоэлементов и их расстояние между собой во всех рядах одинаковы, а каждый ряд фото приемников матрицы смещен по отнощенню к соседнему ряду на расстояние, не превышающее расстояния между двумя сосед ними фотоприемниками в данном ряду. Счи-ф тывающая метка-указатель 28 выполнена в форме перекрестия,На фиг. 3 дан возможный вариант выполнения блоков...
Способ дискретного задания фазового сдвига и устройство для его осуществления

Номер патента: 1337818
Опубликовано: 15.09.1987
МПК: G01R 25/04
Метки: дискретного, задания, сдвига, фазового
...подключениясигналов Р 1 и Р 2 с их нулевыми уровнями эти сигналы также задерживаютсяна время Г с помощью элементов7,1 и 7,2 задержки, Для компенсациифазового сдвига, создаваемого элементом 7.2 задержки во втором канале,сигнал Р 1 задерживается элементом7. 1 на время г . Сосчитав установленное в программе счетчика 14 числоИ синхроимпульсов, пропорциональныхтребуемому углу фазового сдвига, счетчик подает сигнал на триггер 15,сбрасывая его в нулевое положение,С приходом очередного синхроимпульсана Р-триггер 12 от также переводитсяв нулевое положение, и его управляющее напряжение возвращает коммутатор6 в первоначальное положение, закрывает второй элемент 13 совпадения,блокирует режим счета программируемого счетчика 14, Сигнал Р 1 снова...
Устройство для выборки групп разрядов числа и сдвига этих групп или всего числа на заданное

Номер патента: 217719
Опубликовано: 01.01.1968
Автор: Бессонов
МПК: G06F 7/24
Метки: всего, выборки, групп, заданное, разрядов, сдвига, числа, этих
...входу 14), а затем дешифраторы 3 и 4 устанавливают их в положение О (каждый по одному вентилю) в зависимости от установ ленных чисел на этих дешифраторах.После этого сигналы с вентилей 5, открытых в соответствии с набранным кодом на дешифраторах, поступают на входы 15, 1 б, 17, 18, 19, 20, 21, 22 вентилей б и 7.Если на дешифраторе 2 установлено число К, а на дешифраторе 4 - число и, причем К(т, то с вентилей 5 в разрядах от К до и будут выдаваться сигналы, а с остальных разрядов сигналов выдаваться не будет. При К) т с дешифратора 2 выдается дополнительный сигнал в первый разряд вентиля 5, после чего с вентилей 5, начиная с первого разряда по т-й разряд и с К-го разряда по последний разряд, будут выданы сигналы, а с вентилей 5 в...
Способ управления интенсивностью обрабатывающего пучка света, направляемого в заданную область удаленного объекта, и устройство для его осуществления
Номер патента: 1339479
Опубликовано: 23.09.1987
Автор: Черкасов
МПК: G02F 1/17
Метки: заданную, интенсивностью, направляемого, область, обрабатывающего, объекта, пучка, света, удаленного
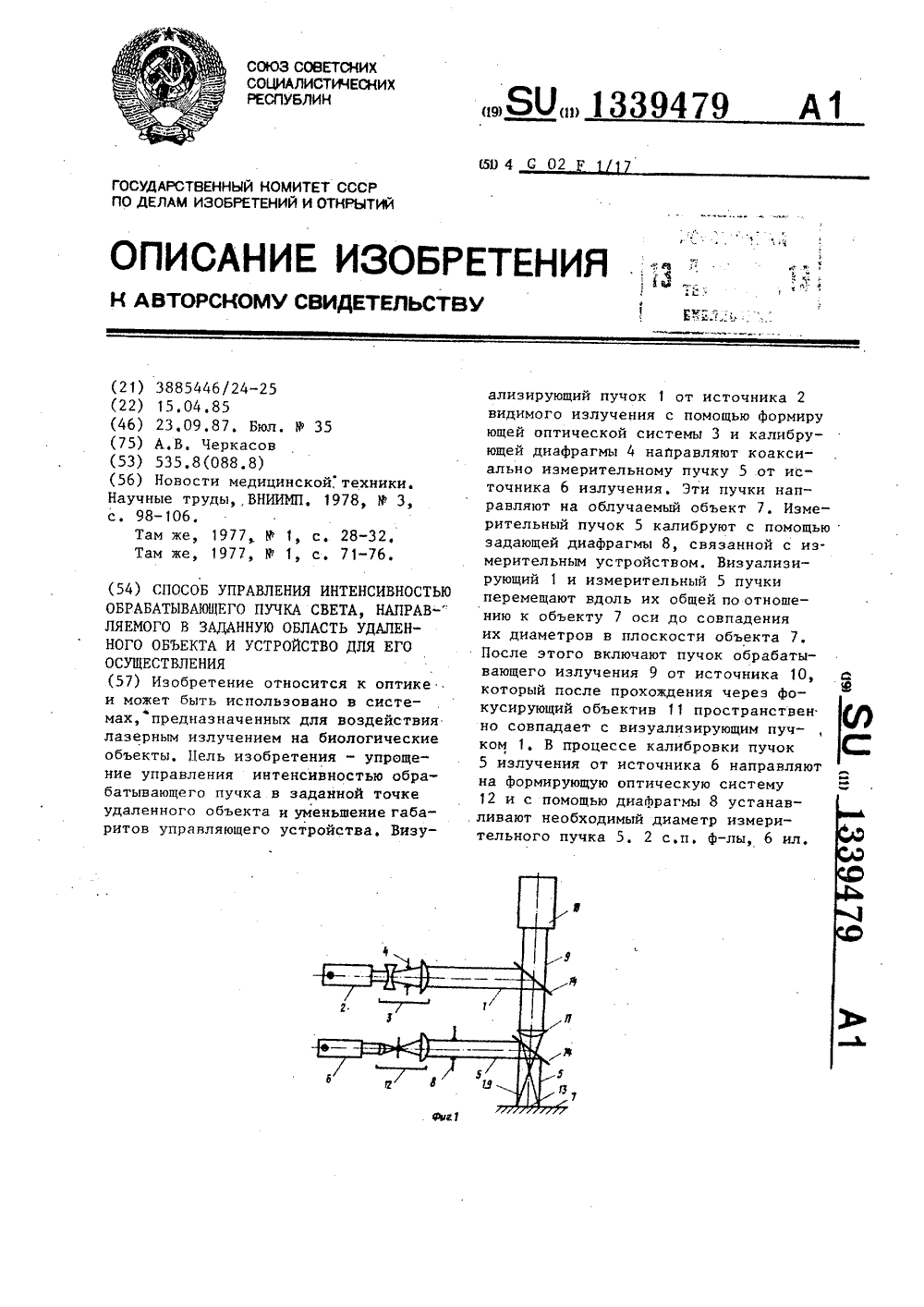
...(источник 6, оптическая система 12, диафрагма 8, зеркало 14) установлен таким образом, чтопучки всех трех каналов на выходеустановки соосны, Наводка устройстваосуществляется перемещением еговдоль оптической оси пучка 5, приэтом не меняется его репер на объекте 7, точно обозначая границы области облучения, при совпадении с которыми реперов пучков 1 и 9 обеспечивается необходимый режим облучения,Реперы пучков 1 и 9 при перемещенииотносительно плоскости объекта 7 об-.лучения изменяют свои размеры, Приэтом в зависимости от положения 1518 плоскости объекта 17. обеспечивается точное наведение двух режимовобработки: режим облучения, обозначенный репером управляющего пучка 5 в положении 17 и режим максимальнойплотности мощности облучения,...
Устройство для определения координат объекта

Номер патента: 1814196
Опубликовано: 07.05.1993
Авторы: Бакут, Ворновицкий, Ильин, Казанцев, Курячий, Ли
МПК: H04N 7/18
...на входы 11 , 1 иределенного таким образом пофрагментномультиплексоров 14, выходы которых сое го скользящего анализа входного динены с бинарными входами линейных - изображения нет необходимости считать корреляторов, образованных последова- полностью каждый очередной фрагмент из тельным (вдоль строк) соединением БФЭ. блока памяти поля зрения,Информация об эталоне, как уже упомина-Для этого достаточно присвоить новые лось, вводится в коррелятор по столбцам, 35 номера строкам(или столбцам) предшествупричем за один такт записи (по сигналу)на ющего фрагмента, являющимся общими для втором Я (управляющем) входе коррелятора предшествующего и нового фрагментов, а обновляется информация об эталоне в пер- затем считать из блока памяти поля...
Предыдущий патент: Устройство для загрузки автомобиля
Следующий патент: Устройство для выгрузки сыпучих грузов из крытых железнодорожных вагонов
Случайный патент: Способ обработки алмаза