Система программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
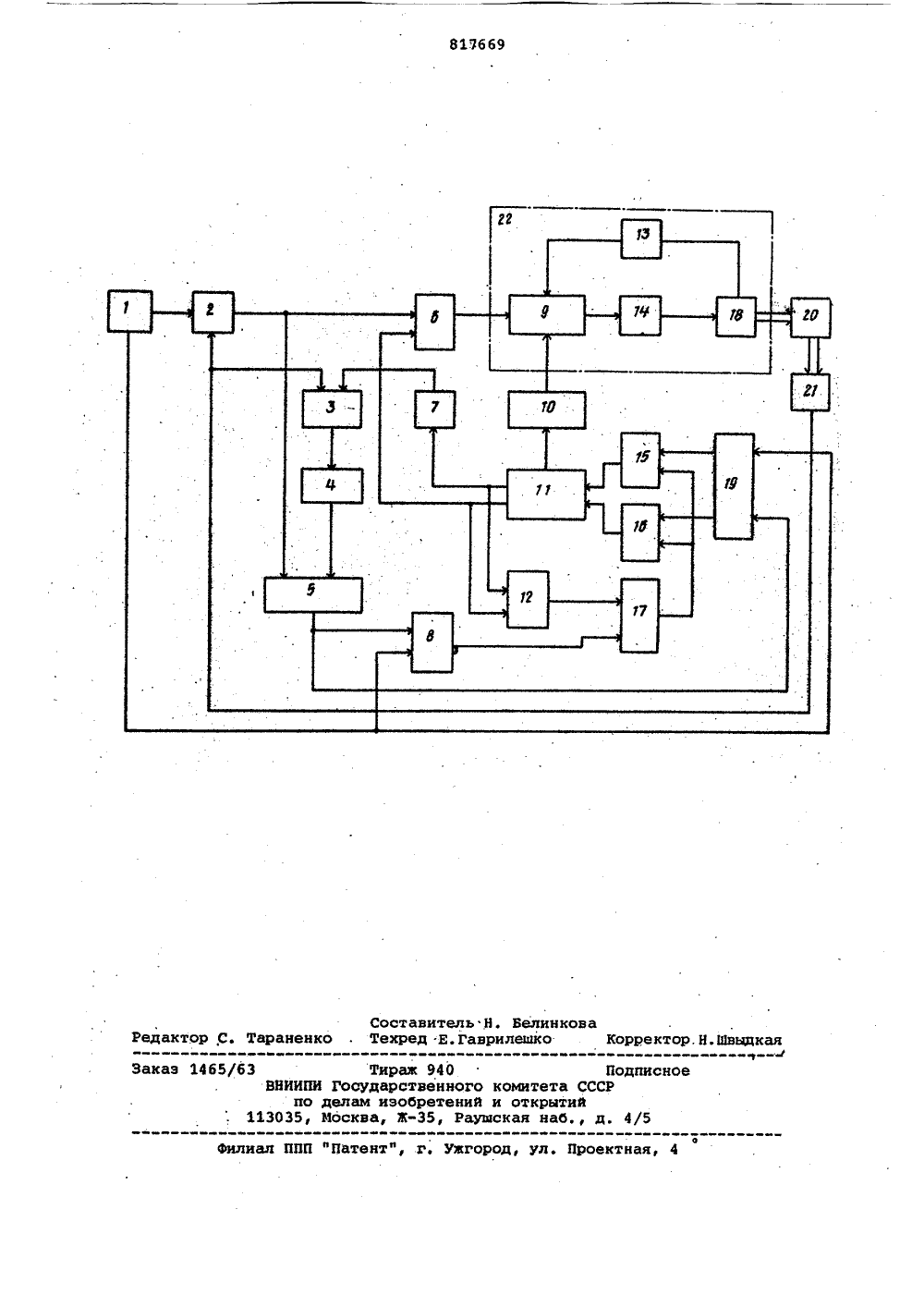
111817669 Союз Советскик Социалистических Республик(51) М. Кл.з 6 05 В 19/407 с присоединением заявки М Государственный комитет СССР ио делам изобретений н открытий(53) УДК 621.50355С 088.8) Дата опубликования описания 300381(54) СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ Изобретение. относится к системам программного управления и может быть использовано, например, в системах управления электроприводами роботов- манипуляторов, а также в системах автоматического управления, применяемых в самых различных областях промышленности.Известна цифровая система управления, содержащая последовательно соединенные задающее устройство, сравнивающее устройство (цифровой сум- . матор), регистр управления, преобразователь код-напряжения, корректи рующее устройство, усилительно-пре образовательное устройство, исполнительный двигатель, механически связанный через редуктор с кодовым .датчиком, выход которого подключен ко входу сравнивающего уотройатва, 20 и блок синхронизации 1).Наиболее близким техническим решением к предлагаемому является счетно-импульсная система программного управления, содержащая после довательно соединенные считывающее. устройство, формирователи, схему определения напряжения, реверсивный счетчик с выходами на последовательно соединенные дешифратор и блох 30 2цифровой индикации и схему равнозначности, которая соединена, с выхо-., дами устройства ввода, схема равно значности соединена.с последователь- но подключенными блоком управления приводом подач, схемой изменения коэФФициента пересчета счетчика, счетчиком фиксированного числа импульсов, триггером со счетным входом, логической схемой переполюсовки, а также последовательную цепочку из. триггера, стартстопного генератора схемы И, схемы ИЛИ и дифференцирующую цепь, выходом соединенную стриггером 21 .Недостатком известных устройств: является невысокое быстродействие и возможность перерегулирования,.Это объясняется .тем, что к исполнительному двигателю прикладывается напряжение, зависящее от величины рассогласования.Цель изобретения - повышение точности системы.Поставленная цель достигается тем, что в систему программного управления, содержащую блок сравнения, первый вход, которого соеди. - нен с первым выходом программно- задающего блока, блок управления35На чертеже представлена блок-схема системы.Система включает программно-задающий блок 1, блок 2 сравнения, четвертый элемент И 3, регистр (путиразгона) 4, компаратор 5, третий 40элемент И 6, Формирователь 7 импульса, второй элемент ИЛИ 8, блок 9сравнения, блок 10 памяти, реверсивиый счетчик 11 первый элемент ИЛИ12, датчик 13 скорости, усилитель 4514 мощности, первый и второй элементы И 15 и 16, генератор 17 импульсов, исполнительный двигатель 18,триггер, 19, нагрузку 20, г,зтчик 21положения и блок 22 управления сле Одящим приводом.Программно-задающий блок 1 задаетвеличину и направление требуемого перемещения нагрузки в виде двоичногокода и Формирует сигналы управлениятриггером 19 и генератором 17, Блок2 сравнивает величину требуемогоперемещения с величиной действительного положения нагрузки 20, поступающего с выхода датчика 21, и выдает на выход величину разности,Элемент И 3 управляет регистром4, в котором хранится код пути разгона,Компаратор 5 сравнивает величинырассогласования и пути разгона. б 5 бО следящим приводом, датчик положения,формирователь импульса и реверсивный счетчик, первый вйход которогосоединен с первым входом первогозлерента ИЛИ, а .первый и второй входы " с выходами соответственно первого и второго элемента И, подключен. ных первыми входами к соответствующим выходам триггера, введены блокпамяти, третий элемент И и последо- .вательно соединенные четвертый элемент И, регистр, компаратор, второйэлемент ИЛИ и генератор импульсов,выход которого подключен ко вторымвходам первого и второго элементовИ, а второй вход через первый элемент ИЛИ - к Первому входу третьегоэлемента И и ко второму выходу ре-.версивного счетчика, соединенноготретьим выходом через блок памятис первым входом блока управленияследящим приводом, а первым выходом.через Формирователь импульса - с первым входом четвертого элемента И,второй вход которого соединен с выходом датчика положения и со вторымвходом блока сравнения, подключенного выходом ко второму входу компаратора и к первому входу тертьегоэлемента И, выход которого соединенсо вторым входом блока управленияследящим приводом, а второй выход 3 Опрограммно-задающего блока и выходкомпаратора соединены с соответствующими входами триггера,Элемент И б управляет блоком 9и переключает систему с одного режима работы на другой (с режима оптимального быстродействия на режимстабилизации). Формирователь 7 формирует импульс разрешения на записьв регистр 4. Элементы ИЛИ 8 и 12управляют генератором 17. Блок 9сравнивает желаемое значение скорости с действительным и выдает значение их разности на усилитель 14, Вблоке 10 хранится закон оптимальногоизменения скорости, Счетчик 11 обеспечивает управление блоком 10 памяти,генератором 17 и элементами И 3 и б.Элементы И 15 и 16, генератор 17,триггер 19 управляют счетчиком 11.Система работает следующимобразом.В начальный момент на первом выходе блока 1 появляется код требуемого перемещения, поступивший на блок2, а по сигналу с его второго выходаосуществляется установка в "1" триггера 19 и через элемент ИЛИ 8запускается генератор 17 Одновременно на блок 9 сравнения через элемент И 6 поступает сигнал ошибки,знак которого запоминается.При этом импульсы с выхода генератора 17 поступают через элемент И 15на суммирующий вход счетчика 11,который начинает "счет вверх", первым импульсом закрывает элемент И би осуществляет дискретную выборку содержимого блока 10 со скоростью,определяемой частотой генератора 17.Система начинает разгон по заданномузакону изменения скорости и в моментдостижения счетчиком 11 верхней гра-.ф мницы происходит отключение генератора 17 (по сигналу с выхода элемента ИЛИ 12), запись в регистр 4значения пути разгона и переходсистемы на режим движения с постоянной скоростью.По мере отработки системой величины заданного перемещения величинаошибки на выходе блока 2 уменьшается, При равенстве оставшегося путиперемещения значению пути разгона,которое хранится в регистре 4, на выходе компаратора 5 появляется сигнал,устанавливающий триггер 19 в "0" ичерез элемент ИЛИ 8 запускающий гене-.ратор 17. При зтрм импульсы с выходагенератора 17 поступают через элемент И 16 на вычитающий вход счетчика 11. Содержимое счетчика умещаетсяи из блока 10 происходит дискретнаявыборка значений скорости, соответствующих оптимальному закону тормо"жения (в обратном порядке oо сравнению с режимом разгона),В момент достижения нижней границы счетчика появляется сигнал на еговтором выходе, который через элементИЛИ 12 отключает генератор 17 и открывает элемент И б. Система.переходит на режим стабилизации. При этом работает контур регулирования по положению и скорости.В предлагаемой системе разгон и торможение осуществляется по заранее рассчитанному оптимальному зако 5 ну, хранящемуся в блоке. памяти.Это позволяет реализовать практически любые законы оптимального управления, в. том числе учитывающие ограничения на высшие производные. Система обеспечивае 2 монотонные и быстродействующие переходные процессы. Ее применение в системах управления промышленными роботами повысит производительность обслуживающего оборудования и уменьшит динамические усилия 15 на элементы конструкции робота (за счет ограничений на высшие производные), Последнее приводит к увеличению долговечности роботов, уменьшит их вес и габариты.20Формула изобретенияСистема программного управления, содержащая блок сравнения, первый вход которого соединен с первым выходом программно-задающего блока, блок управления следящим приводом, датчик положения, Формирователь импульса и реверсивный счетчик, первый ,выход которого соединен с первым входом первого элемента ИЛИ, а первый и второй входы - с выходами соответственно первого и второго элементов И, подключенных первыми вхо дами ксоответствующим выходам триг-:гера, отличающаяся тем,что, с целью повышения точности системы, в,нее введены блок памяти, третий элемент И и последовательносоединенные четвертый элемент И, регистр, компаратор, второй элементИЛИ и генератор импульсов, выходкоторого подключен ко вторым входампервого и второго элементов И, авторой вход через первый элемент ИЛИк первому входу третьего элементаИ и ко второму выходу реверсивногосчетчика, соединенного третьим выходом через блок памяти с первымвходом блока управления следящимприводом, а первым выходом через Формирователь импульса - с первым входом четвертого элемента И, второйвход которого соединен с выходомдатчика положения и со вторым входом блока сравнения, подключенноговыходом ко второму входу компаратора и к первому входу третьего элемента И, выход которого соединен совторым входом блока управленияследящим приводом, а второй выходпрограммно-задающего блока и выходкомпаратора соединены с соответствующими входами триггера.Источники инФормации,принятые во внимание при экспертизе1. Ботоврин А.А. и др, Цифровые,системы управления электроприводомЛ., "Энергия", 1977, с, 241.2. Авторское свидетельство СССРР 309352, кл 6 05 В 19/18 1969817669 Составитель Н. ВелинкоТехред .Е.Гаврилешко оррек дактор С. Тараненко акаэ 1465/63 иал ППП "Патент", г. Ужгород, ул. Проектна Тираж 940 ВНИИПИ Государственного к по делам изобретений и 113035, Москва, Ж, Раущс
СмотретьЗаявка
2767981, 17.05.1979
ПРЕДПРИЯТИЕ ПЯ А-1477
ДАШКЕВИЧ ВАЛЕРИЙ ВИКТОРОВИЧ, ПАШКЕВИЧ АНАТОЛИЙ ПАВЛОВИЧ
МПК / Метки
МПК: G05B 19/416
Метки: программного
Опубликовано: 30.03.1981
Код ссылки
<a href="https://patents.su/4-817669-sistema-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система программного управления</a>
Круговой интерполятор

Номер патента: 1665341
Опубликовано: 23.07.1991
Авторы: Палташев, Смирнов, Стародубцев
МПК: G05B 19/4103
Метки: интерполятор, круговой
...4, Во втором такте содержимое регистра 4 добавляется к содержимому сумматора 1. Далее с помощью первого блока 9 сравнения производится сравнение содер, жимого сумматора 1 с содержимым регистра 5. Если содержимое регистра 5 оказывается больше, то производится сравнение содержимого сумматора 1 с половиной содержимого регистра 11 задания радиуса (путем смещения выходов регистра 11 радиуса на один разряд влево). Если половина содержимого регистра 11 радиуса оказывается больше, чем содержимое накапливающего сумматора 1, то производится увеличение значения меньшей координаты. В противном случае(т.е. содержимое регистра 5 меньше содержимого сумматора 1 или половина содержимого регистра 11 задания радиуса меньше или рав на содержимому...
Устройство для диагностирования взаимосвязанных электронных блоков и элементов блоков

Номер патента: 1441356
Опубликовано: 30.11.1988
Авторы: Зюбан, Парамонов, Трубицын
МПК: G05B 23/02
Метки: блоков, взаимосвязанных, диагностирования, электронных, элементов
...входывторого дешифратора 14, кроме того,1 через группу элементов ИЛИ-НЕ 16,116,2 на второй и третий входы элемента ИЛИ 17.С выходов 42-45 первого дешифратора 9 сигналы поступают на соответствующие индикаторы 10.1-10.4 блока 10индикаторов.С выходов 56-59 второго дешифрато"ра 14 сигналы поступают соответствен- ЗБно через первую и вторую группы клю"чей 18, 19 на соответствующие индика"торы 20.1-20,4 и 21.1-21.4 блоков 20и 21 индикаторов.С выхода элемента ИЛИ 17 сигналыпоступают на управляющие входы ключейпервой 18 и второй 19 группы, причемна управляющие входы первой группы18 непосредственно, а на управляющиевходы второй группы ключей 19 черезэлемент НЕ 22,Индикаторы включаются при поступлении на их входы сигналов "1"...
Устройство поиска неисправных блоков и элементов

Номер патента: 1709351
Опубликовано: 30.01.1992
Авторы: Буинов, Ламбаева, Мухопад, Скибинский
МПК: G06F 11/14
Метки: блоков, неисправных, поиска, элементов
...и выход блока управления со входами первого блока элементов ИЛИ, а также соединения выхода первого блока элементов ИЛИ с входом регистра оценки и выхода регистраоценки с входами второгоблока элементов И и блока оценки кода исправности, соединения выхода регистра результата с входом блока контроля результата и выхода блока контроля с входами первого блока элементов И и блока управления, а также выхода блока управления с входом блока контроля результата, выхода второго счетчика с входом блока контроля результата. Все новые связи вместе с вновь введенными блоками обеспечивают расширение области применения устройства путем одновременного контроля разнородных типовых блоков вичислительной техники.На фиг.1 представлена структурная схема...
Устройство для контроля блоков памяти

Номер патента: 894799
Опубликовано: 30.12.1981
Авторы: Бахтадзе, Гордадзе, Джагаров, Манукян, Чкония
МПК: G11C 29/00
...22 сравнения, В последней осуществляется поразрядное сравнение считанного из блока 30 памяти вектора информации с вектором контрольного теста, сформированного счетчиком 5. В случае несов- е падения на единичный вход триггера 9 с вы- . хода схемы 22 сравнения поступает сигнал, по которому прерывается работа генератора 10 ;синхросигнвлов и прекращается дальнейшая проверка блока 30 памяти. Одновременно ре эа зультат сравнения поступает на индикатор 19, Иццикатор 21 сигнализирует об остановке работы устройства. По индикатору 17 оператор определяет адрес неисправной линейки блока 30 памяти. Индикатор 18 показьвает вектор контрольного теста, по которому производилась проверка, Оператор определяет неисправную ячейку блока 30 памяти путем...
Устройство для управления записью информации в блок памяти

Номер патента: 972588
Опубликовано: 07.11.1982
Авторы: Агапов, Богданова, Гузеев, Дегтярев, Дмитриев, Поликанов
МПК: G11C 7/00
Метки: блок, записью, информации, памяти
...поступающие на второй четвертый, седьмой и девятый элементы И 12,14,17 и 19. В зависимости от состояния управляющего триггера 10 открывается второй элемент И 12 и информация через перный элемент ИЛИ 21 поступает на соответствующий выход устройстна, или девятый элемент И 19 и инфор" мация через четвертый элемент ИЛИ 24 поступает на соответствующий выход устройства. Адрес для записи информации поступает с выхода первого счетчика 2 на второй вход четвертого элемента И 14 и через второй элемент ИЛИ 22 на соответствующий выход устройства или через седьмой элемент И 17, третий элемент ИЛИ 23 на соответствующий выход устройства. После записи информационного слова содержимое первого счетчика 2 увеличивается на единицу.При поступлении...
Предыдущий патент: Устройство для программногоуправления приводом
Следующий патент: Устройство для регулированияуровня воды b бьефах
Случайный патент: Устройство для контроля уточной нити на многозевной ткацкой машине