Привод перемещения звеньев захвата руки робота
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 779066
Автор: Кармацкий




Текст
О П И С А Н И Е (11)779066ИЗОБРЕТЕН ИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскикСоциалистическихРеспублик(51) М, Кл.а В 25 1 15/00 Гасударственный кемнтет СССР до делам наебретеннй и юткрытнйДата опубликования описания 25.11.80(54) ПРИВОД ПЕРЕМЕЩЕНИЯ ЗВЕНЬЕВ ЗАХВАТА РУКИ РОБОТА1Изобретение относится к конструкции промышленных роботов, в частности к конструкции приводов их отдельных элементов,главным образом звеньев кистевых захватов рук роботов, и может быть использовано в тех отраслях промышленности и хозяйства, которые создают и применяют роботы.Известны конструкции захватов механических рук роботов, в которых наиболеераспространенным приводом перемещения.звеньев захватов является пневмо- или гидроцилиндры, одним концом (например кор ппусом) закрепленные на одном звене, а вторым (штоком) связанные со вторым звеномК,Однако, наряду с достаточной простотойконструкции и управления, эти приводы имеют ряд недостатков: ограниченные возможности миниатюризации; трудность воспроизведения наиболее благоприятных законов изменения усилий на выходе; сложность размещения цилиндров непосредственно на звеньях,Цель изобретения - повышение универ 20сальности и упрощение конструкции привода,Указанная цель достигается тем, что онснабжен нерастяжимым гибким элементоми эластичным мешком, соединенным с источником давления, причем нерастяжимый гибкий элемент расположен надмешком и одним своим концом закреплен на одном звене захвата, а вторым - на другом звене, а также снабжен упругой пластиной, расположенной между мешком и нерастяжимым гибким элементом, причем мешок выполнен многогофровым.На фиг. 1 изображен захват с предлагаемым приводом, общий вид; на фиг. 2 вид А на фиг. 1; на фиг. 3 - разрез Б - Б на фиг. 2; на фиг. 4 - привод в рабочем состоянии; на фиг. 5 - вид В на фнг. 2.Для иллюстрации конструкции предлагаемого привода и его работы взят трехзвенный захват, состоящий из неподвижного звена 1 (запястья) и двух подвижных звеньев 2 и 3 (пальцев), Звенья 2 и 3 относительно звена 1 перемещаются, т.е, занимают положения 1 или 11 (фиг. 1), при помощи привода, который состоит из эластичного мешка (или камеры) 4, соединенного трубопроводом 5 с источником энергии, например, сжатого воздуха, через соответствующую переключающую аппаратуру (на фиг. не показана), Поверх мешка 4 расположен гибкий нерастяжимый элемент 6, например трос или79066 формула изобретения 7 лента, который одним концом 6 закреплен на звене 1, вторым 6" - на звене 2 (для простоты рассмотрим пару звеньев 1 и 2, так как для пары 1 и 3 все аналогично). Для предохранения мешка 4 от износа при трении о гибкий элемент 6 между ними помещена упругая пластина 7 со скобами 8, под которыми проходит элемент 6. Для возврата звеньев 2 и 3 в исходные положения служат пружины 9. Мешок 4 и пружины 9 помещены в углублениях, выполненных в звене 1. Пружины 9 через тросики 10 связаны со звеном 2 через деталь 11, имеющую желоб.Элемент 6 связан со звеном 2 через шкив 12 с желобом. Шкив 12 шпильками 13 скреплен со звеном 2. Последнее на оси 14 вращается относительно звенав подшипниках 15. Для лучшего перехода элемента 6 и для уменьшения его износа имеется шкив 16, свободно вращающийся на оси, вмонтированной в звено 1,Привод работает следующим образом, В исходном положении звенья 2 и 3 занимают горизонтальное положение 1. Воздух из мешка 4 стравлен, т. е. мешок сжат и полностью находится в углублении. Элемент 6 занимает горизонтальное положение (фиг. 3).Если необходимо подвести звенья 2 и 3 друг к другу (до положения 11 или какого-то промежуточного), тогда по трубопроводу 5 в мешок 4 подается сжатый воздух. Мешок начинает подниматься (фиг. 4). При этом через пластину 7 он воздействует на элемент 6, который одним концом 6 закреплен на звене 1, вторым концом 6" через шкив 12 начинает поворачивать звено 2 на оси 14 до требуемого положения. Вместе с этим растягиваются пружины 9.Когда звено 2 нужно вернуть в исходное положение 1, воздух из мешка 4 выпускается, а пружины 9 возвращают систему в первоначальное состояние.Выполнение мешка 4 многогофровым благоприятно сказывается на его работе, а также позволяет осуществлять большие углы поворота звеньев 2 и 3.Расположение элемента 6 в исходном положении горизонтально обеспечивает возможность развивать большие усилия на элементе 6 (на начальных стадиях работы).Предлагаемый привод весьма компактен, р может быть использован в широком диапазоне конструкций рук роботов (от миниатюрных до больших), так как легко встраивается. При использовании зубчатых или иных передач в шарнирах возможности привода могут быть еще более расширены. 1. Привод перемещения звеньев захватаруки робота, содержащий источник давле ния и силовой орган, взаимодействующийсо звеньями захвата, отличающийся тем,что, с целью повышения универсальности иупрощения конструкции, он снабжен нерастяжимым гибким элементом и эластичныммешком, соединенным с источником давле 1 ф ния, причем нерастяжимый гибкий элементрасположен над мешком и одним своим концом закреплен на одном звене захвата, авторым - на другом звене.2. Привод по п. 1, отличающийся тем,что он снабжен упругой пластиной, расположенной между мешком и нерастяжимымгибким элементом,3. Привод по п. 1, отличающийся тем,что мешок выполнен многогофровым.Источники информации,Зз принятые во Внимание при экспертизе1, Белянин П. Н. Промышленные роботы.М., Машиностроение, 1975, с. 199 - 205./амид 8 РедакЗаказ Государственного комитеталам изобретений и открытква, Ж - 35, Раушская наб Патента, г. Ужгород, ул. П р А. Долинич13/19ВНИИПИпо д113035, МоФилиал ППП Составитель Л. ОрлТехред К. ШуфрнчТираж 1033 Корректор М. КосПодписноеСССРйд. 4/5роектная, 4
СмотретьЗаявка
2686937, 21.11.1978
Заявитель
КАРМАЦКИЙ ЮРИЙ ИВАНОВИЧ
МПК / Метки
МПК: B25J 15/00
Метки: захвата, звеньев, перемещения, привод, робота, руки
Опубликовано: 15.11.1980
Код ссылки
<a href="https://patents.su/4-779066-privod-peremeshheniya-zvenev-zakhvata-ruki-robota.html" target="_blank" rel="follow" title="База патентов СССР">Привод перемещения звеньев захвата руки робота</a>
Способ монтажа элементов строительных конструкций со сквозными каналами по высоте

Номер патента: 606985
Опубликовано: 15.05.1978
Авторы: Иванов, Тимофеенко
МПК: E04G 21/00
Метки: высоте, каналами, конструкций, монтажа, сквозными, строительных, элементов
...строительной конструкции, . 30 например, стеновую панель 1 с вентилируемыми сквозными отверстиями, устанавливают на стройплощадке в кассету. В сквозные вертикальные каналы 2, проходящие через панель, вводят соедини тельную деталь 3 до упора с опорной площадкой. При подъеме элемента конструкции краном в проектное положение соединительная деталь, свободно установленная в канале, под действием гра витационной силы опускается до упора с Фланцем 4, размещенным ниже петли 5. Конец детали выступает ниже кромки нижней плоскости панели на 1-1,5 м. Затем конструкцию подают к месту монтажа и опускают на аналогичную панель б, в сквозные каналы которой вводят конусообразную часть 7 детали. При этом происходит точная фиксация конструкции...
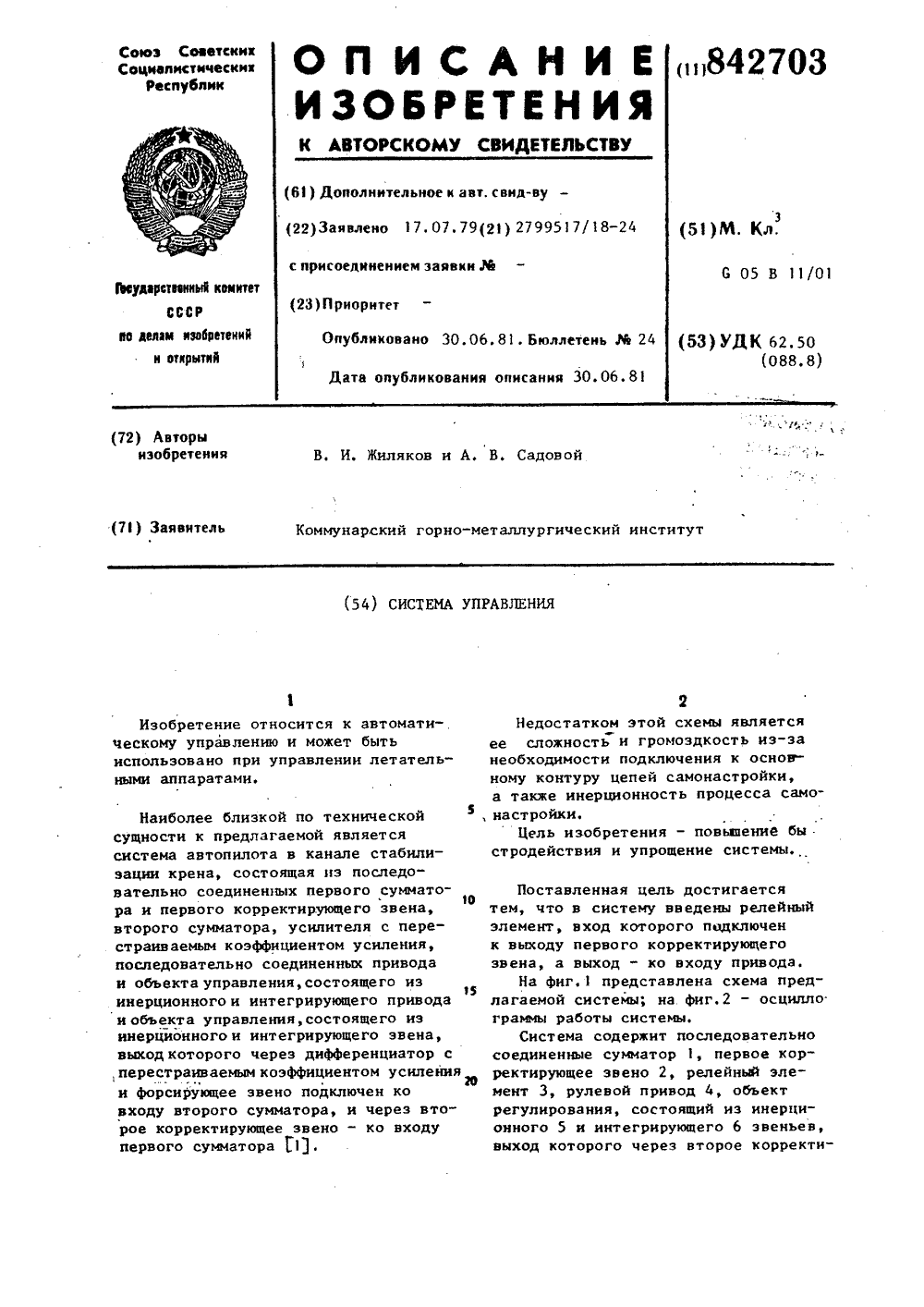
Система управления
Номер патента: 842703
Опубликовано: 30.06.1981
МПК: G05B 11/01
...изобретения - повьапениЕ бы .стродействия и упрощение системы. Поставленная цель достигается тем, что в систему введены релейный элемент, вход которого подключен к выходу первого корректирующего звена, а выход - ко входу привода.На фиг.1 представлена схема предлагаемой системы; на фиг.2 - осцилло. грамчы работы системы.Система содержит последовательно соединенные сумматор 1, первое корректирующее звено 2, релейный элемент 3, рулевой привод 4, обьект регулирования, состоящий из инерционного 5 и интегрирукнцего 6 звеньев, выход которого через второе корректи84270 15 СоставительТехред М. Го Грибованка Коррек еш Пожо Редакт аказ 5096/55 Тираж 940 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений н открытий...
Схват манипулятора

Номер патента: 1342730
Опубликовано: 07.10.1987
Автор: Реутов
МПК: B25J 15/12
Метки: манипулятора, схват
...плечо двуплечего рычага 17 с помощью оси 26 шарнирно соединено с концом тяги 18, противоположный конец которой шарнирно соединенс кронштейном 27 выходного звена 145посредством оси 28,Схват манипулятора работает следующим образом.При нахождении выходного звена 14в крайнем выдвинутом к опорной поверхности 2 положении, соответствующем наименьшему установленному расстоянию между ползунами 19, упругиеэажимные губки полностью распрямлены, что достигается выбором необходимой длины троса 5В этом состоянии схват манипулятора полностьюраскрыт.Для эахватывания заготовки 29(фиг, 2) схват манипулятора ориентируют относительно заготовки 29 так,чтобы она находилась между упругимизажимными губками, затем перемещаютвыходное звено 14, удаляя его...
Соединительное звено для гибких элементов

Номер патента: 590534
Опубликовано: 30.01.1978
Автор: Кизина
МПК: F16G 15/06
Метки: гибких, звено, соединительное, элементов
...бандажа 8 выполнены сквознойпаз 12 для установки в него гайки 13 с накаткой на наружной поверхности и сквозноецилиндрическое гладкое отверстие 10 подрезьбовую шпильку 9, на котором закрепленагайка 13.Невыпадапие резьбовой шпдаяа 8 обеспечиваетсяштифтом 14, запрессованным в бандаж 8 так, что позволяет шпильке 9 совершать прямолинейно-поступательное движение в обе стороны, предохраняя его от осевого поворота при вращении гайки 13,Резьбовая шпилька 9 выполнена с продольной лыской 15 с размерами, обеспечивающими прямолинейно-поступательное перемещение шпильки 9 в обе стороны в момент одевания и закрепления бандажа 8 на разъемном корпусе 7, а также предохраняющими его от выпадания из бандажа 8.Для соединения звена с поднимаемым грузом 16...
Соединительное звено для гибких элементов орудий лова

Номер патента: 1117029
Опубликовано: 07.10.1984
Авторы: Гороховский, Лейнов, Людмирский, Ровный
МПК: A01K 75/00
Метки: гибких, звено, лова, орудий, соединительное, элементов
...образующего проушинуА - длина проушины.На фиг,1 изображено прсдлагаемое звено н сборе; на фиг.2 - одна из состанцых частей звена, нид сбоку; на фиг.3 - сечение А-А на фиг.2; ца фиг,4 - звено, включенное и канат орудия лова, на фиг.5 - узелна фиг.4, ца фиг.6 - положение составных частей звена при его рассоединении,Соединительное звено состоит из двух одинаковых частей 1, одни концы которых имеют проушины 2 для гибких элементов 3 (канатон). Один из противоположных концов каждой части 1 выполнен н виде ступенчатогоштыря 4, а другой - н виде втулки 5, взаимодействующей со штырем 4 противоположной части 1 при соединении звена.Каждая из частей 1 снабжена внутренним 6 и внешним 7 ребрами, обеспечивающими собранному звену обтекаемую форму,...
Предыдущий патент: Манипулятор
Следующий патент: Манипулятор
Случайный патент: Аппарат для распределения размельченного