Система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
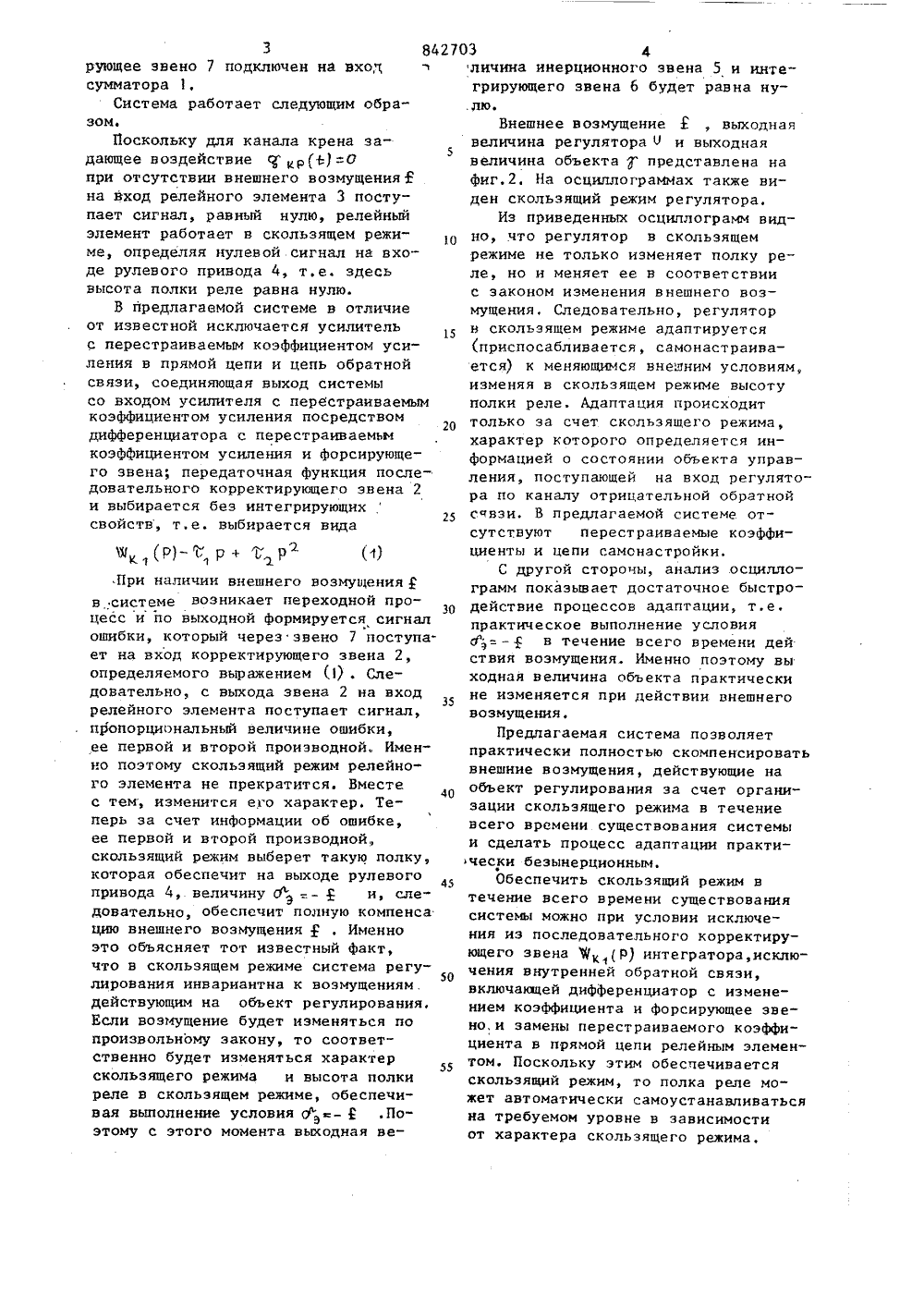
ОП ИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоаетскикСоциалистическиаРеспублик 842703(51)М. Кл,6 05 В 11/О 1 Ьеударстеенны 11 квинтет СССР вф делам язабретеннй н втарытлй(54) СИСТЕМА УПРАВЛЕНИЯ Изобретение относится к автоматическому управлению и может быть использовано при управлении летательными аппаратами. Наиболее близкой по техническоии5 сущности к предлагаемой является система автопилота в канале стабилизации крена, состоящая из последовательно соединенных первого суммато 10 ра и первого корректирующего звена, второго сумматора, усилителя с перестраиваемым коэффициентом усиления, последовательно соединенных привода и объекта управления, состоящего изтз инерционного и интегрирующего привода и объекта управления, состоящего из инерционного и интегрирующего звена, выход которого через дифференциатор с ,перестраиваемым коэффициентом усиления30 и форсирующее звено подключен ко входу второго сумматора, и через второе корректирующее звено - ко входупервого сумматора Г 1. Недостатком этой схемы является ее сложность и громоздкость из-за необходимости подключения к основному контуру цепей самонастройки, а также инерционность процесса само, настройки.Цель изобретения - повьапениЕ бы .стродействия и упрощение системы. Поставленная цель достигается тем, что в систему введены релейный элемент, вход которого подключен к выходу первого корректирующего звена, а выход - ко входу привода.На фиг.1 представлена схема предлагаемой системы; на фиг.2 - осцилло. грамчы работы системы.Система содержит последовательно соединенные сумматор 1, первое корректирующее звено 2, релейный элемент 3, рулевой привод 4, обьект регулирования, состоящий из инерционного 5 и интегрирукнцего 6 звеньев, выход которого через второе корректи84270 15 СоставительТехред М. Го Грибованка Коррек еш Пожо Редакт аказ 5096/55 Тираж 940 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений н открытий 113035, Москва, Ж, Раушская иаб., д. 4/"Патент",Ужгород, ул, Проек илнал Этим достигается безынерционность самонастройки и упрощение системы. Поскол 1 ку теперь для процесса само. настройки нет необходимости в цепях самонастройки, то они. также исключаются, чем дополнительно достигается упрощение системы.Использование предлагаемой системы позволит строить высококачественные автопилоты по каналу крена,обладающее свойствами инвариантности к внешним возмущениям и переменным параметрам при существенном упрощении системы управления.Формула изобретенияСистема управления, содержащая последовательно соединенные сумматор 3 Ьи первое корректирующве звено и привод, выходом соединенный через обьект управления со входом второго корректирующего звена, выход которого соединен со входом сумматора, о т л и - ч а ю щ а я с я тем, что, с целыми упрощения и повьвения быстродействия в нее введен релейный элемент, вход которого соединен с выходом первого корректирующего звена, а выход - со входом привода,Источники информациипринятые во внимание при экспертизе1. Сб. "Принцип построения и проек" тнрования самонастраивающихся систем1 И управления. М. Машиностроение1972, с. 46.
СмотретьЗаявка
2799517, 17.07.1979
КОММУНАРСКИЙ ГОРНО-МЕТАЛЛУРГИЧЕСКИЙИНСТИТУТ
ЖИЛЯКОВ ВИКТОР ИВАНОВИЧ, САДОВОЙ АЛЕКСАНДР ВАЛЕНТИНОВИЧ
МПК / Метки
МПК: G05B 11/01
Метки:
Опубликовано: 30.06.1981
Код ссылки
<a href="https://patents.su/3-842703-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления</a>
Самонастраивающаяся система управления
Номер патента: 1126926
Опубликовано: 30.11.1984
Автор: Орещенко
МПК: G05B 13/02
Метки: самонастраивающаяся
...усилитель, вход которого соединенс выходом второго сумматора, выходыдатчиков скорости и тока возбуждениясоединены соответственно с вторыми третьим входами регулятора, четвертый вход которого соединен с выходомдатчика тока двигателя и первым вхо 1126926димости реализация пропорционально- интегрального звена).Корректирующий усилитель 13 обеспечивает усиление и преобразование выходного сигнала сумматора 11, Закон 5 преобразования корректирующего усилителя 13 определяется требованиями, предъявляемыми к точности определения параметра 3 . В ряде случаев пропорциональный закон корректирующего усилителя 13 является достаточным для удовлетворения указанных требований, При высоких требованиях к точности определения Э в законе...
Управляющее устройство

Номер патента: 1161916
Опубликовано: 15.06.1985
Авторы: Капустин, Михальченок, Новиков, Силукова
МПК: G05B 13/02
Метки: управляющее
...канала(фиг.2) содержит последовательно соединенные регулятор 11, сумматор 12и регуляторы 13 внутренних контуров управления данного канала.Устройство компенсации взаимосвязей работает следующим образом.В каждом канале 1 регулируемая координата с выхода исполнительногооргана 2 измеряется датчиком 4(фиг.1). Полученный сигнал измеренияподается на сумматор 5, определяющий отклонение регулируемой координаты, Блок 3 управления (фиг.2) и 40корректирующие звенья 7 и 7" формируют закон управления регулируемойкоординаты канала 1 по ее отклонениюи по отклонениям регулируемых координат смежных с данным каналом , 43управления. 1 и 1 , т.е,(1) 50 ГДЕ ЭР В % К. КН 1 передаточная функция регулятора-го канала управления,передаточные функции второго и...
Устройство для синхронизации псевдошумовых сигналов

Номер патента: 746953
Опубликовано: 23.07.1980
Авторы: Бурцев, Галкин, Чердынцев
МПК: H04L 7/02
Метки: псевдошумовых, сигналов, синхронизации
...перемножитель 9, второй интегратор 10, пороговый блок 11, .формирователь 12 импульсов, дополнительныинтегратор 13, квадратор 14, дополнительный пороговый блок 15, ключ 16 и зОгенератор 17 псевдослучайной последовательности,Устройство работает следующим образом.Выходной сигнал поступает на входперемножителя 9 и блока 1 задержки надлительность информационной посылки. Интегратор. 10, квадратор 14, пороговыйблок 11 и ключ 16 обеспечивают поисксигнала по временному положению, в товремя как перемножители 2 и 3, сумматор4, интегратор 5, перемножитель 6, управляемый генератор 7 и генератор 17 представляют собой кольцо слежения эа задержкой. 45Особенность работы описываемого устройства по сравнению с прототипом заключается в следующем.В...
Устройство для контроля напряжений обратной последовательности несимметричной системы напряжений

Номер патента: 1267300
Опубликовано: 30.10.1986
Авторы: Жежеленко, Зиновченко
МПК: G01R 29/16
Метки: напряжений, несимметричной, обратной, последовательности, системы
...импульсов, т,е, к появлению его низкочастотной переменной составляющей, Размах этой низкочастотной переменной составляющей зависит от относительной величины напряжения обратной последовагельности (коэффициента несимметрии) или гармоники и при их значениях до 10-157 форма кривой близка к синусоиде, Для приведения выходного сигнала:треобраэователя 4 к масштабу выходного сигнала выпрямителя 2 служит управляемый делитель 5 напряжения, Это необходимо, так как напряжение частоты 100 Гц в выходном напряжении выпрямителя 2 пропорционально напряжению обратной последовательности 7 , а гармоническая составляющая частоты 100 Гц выходного напряжения преобразователяпропорциональна коэффициенту не- симметрии ,=У /Ц, (где Б, - напряжение...
Система для управления и контроля привода гравиметра

Номер патента: 954924
Опубликовано: 30.08.1982
Авторы: Артеменко, Романов, Ульяновский
МПК: G05B 11/01
Метки: гравиметра, привода
...реле, подготавливвющее цепь к пе- ЗО рестройке диапазона, которая произойдет по завершении измерений с последующим повторением цикла нв этом же пункте.На чертеже изображена система двя управления и контроля привода гравимет- рв Система содержит фотоэлектрический датчик 1 положения маятника, например фоторезистор, включенный по мостовой схсме с источником света, потенциометрический дятчик 2 угла поворота микро- метрического винта, например многооборотный потенциометр, первый двигатель 3, второй двигатель 4, предварительный усщвтель 5, усилитель мощности 6, первый счетчик 7, концевые выключатми 8, первое реле 9 с конгактами 10, второе реле 11 с контактами 12, третье реве 13 с контактами 14, четвертое реле 15 с контактами 16 и 17, пятое...
Предыдущий патент: Регулятор
Следующий патент: Устройство для определения момента сопри-косновения шлифовального круга c обра-батываемым изделием и ограничения мощ-ности резания ha шлифовальных ctahkax
Случайный патент: Литьевая форма с точечными литниками