Робот
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
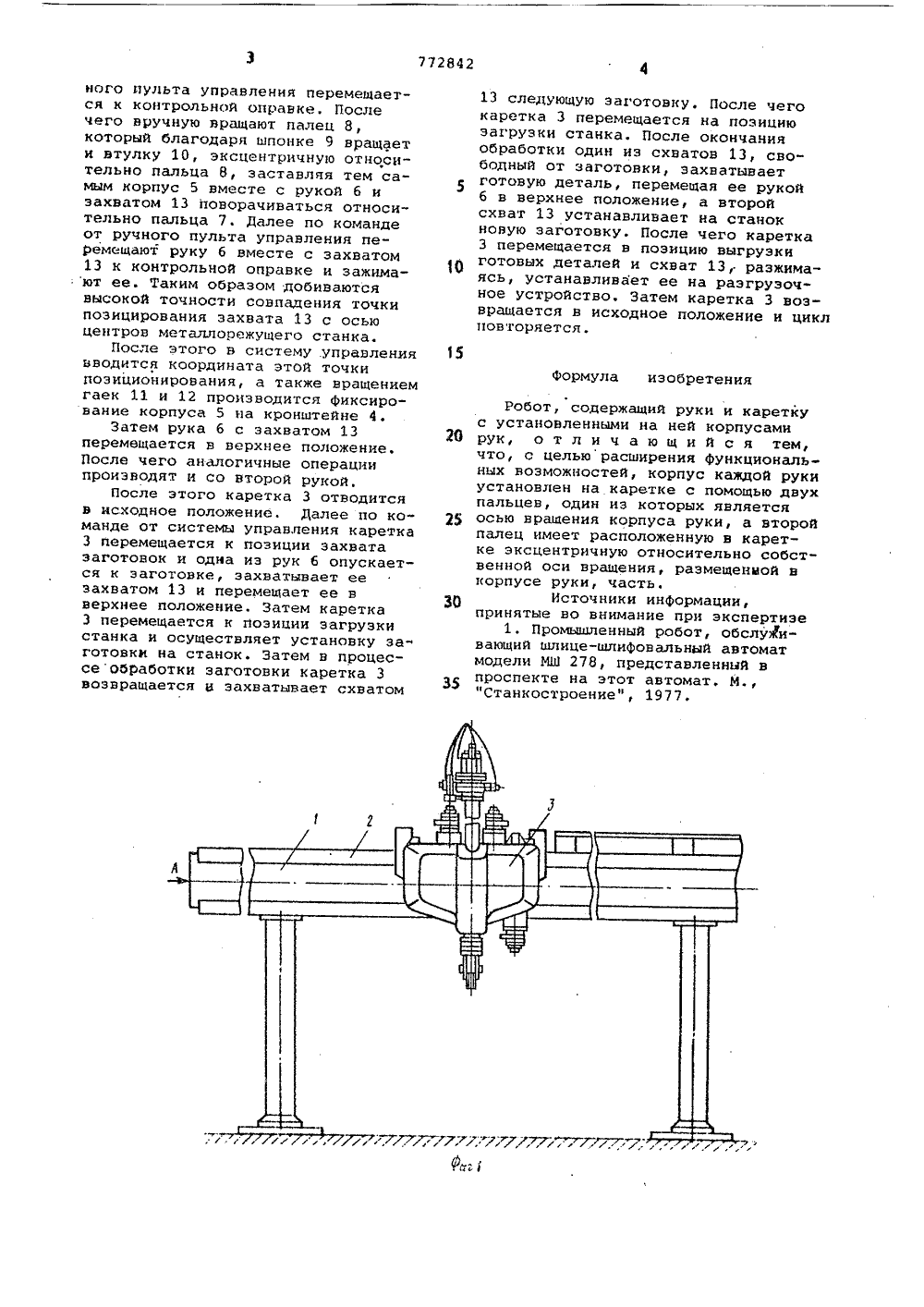
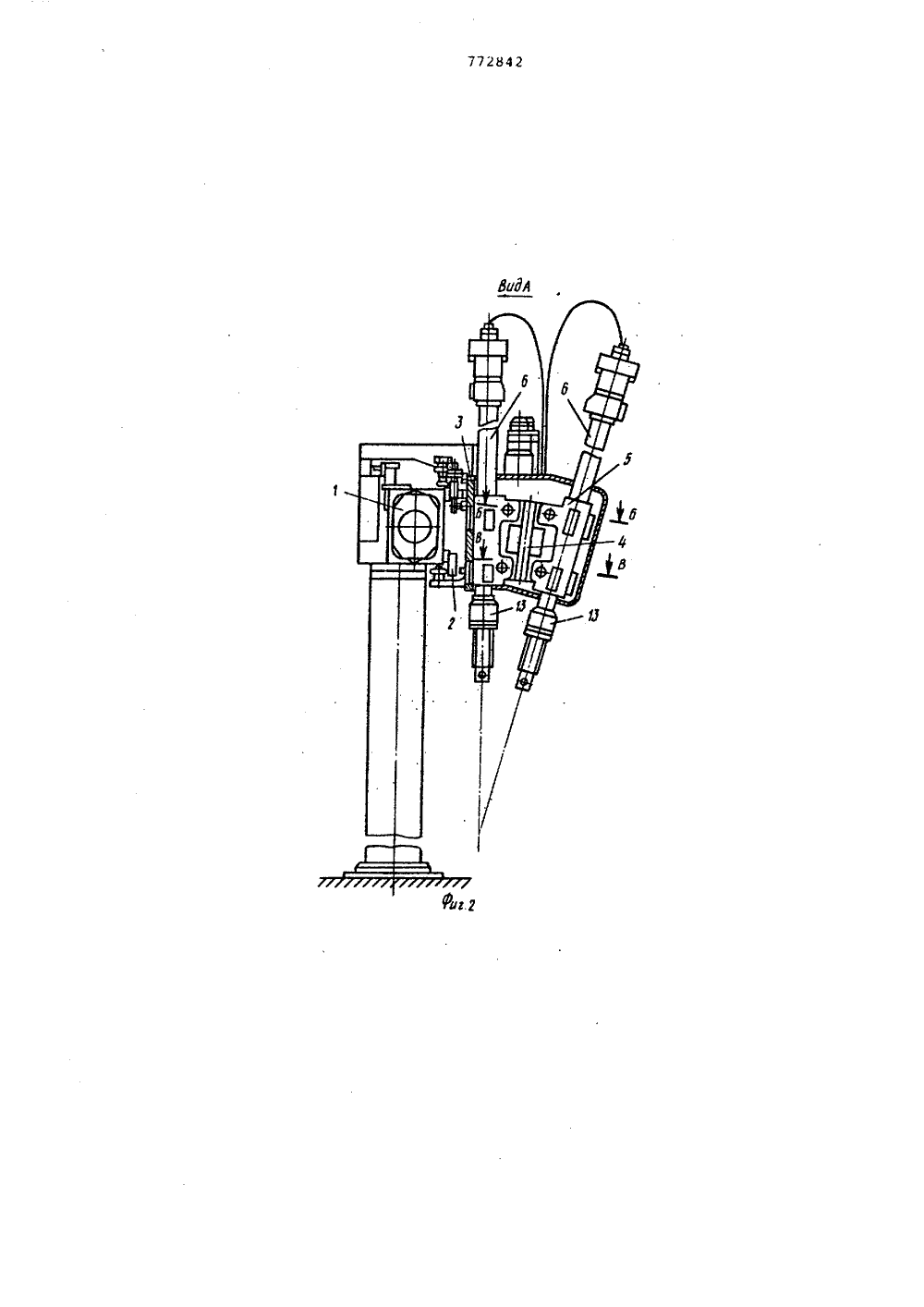
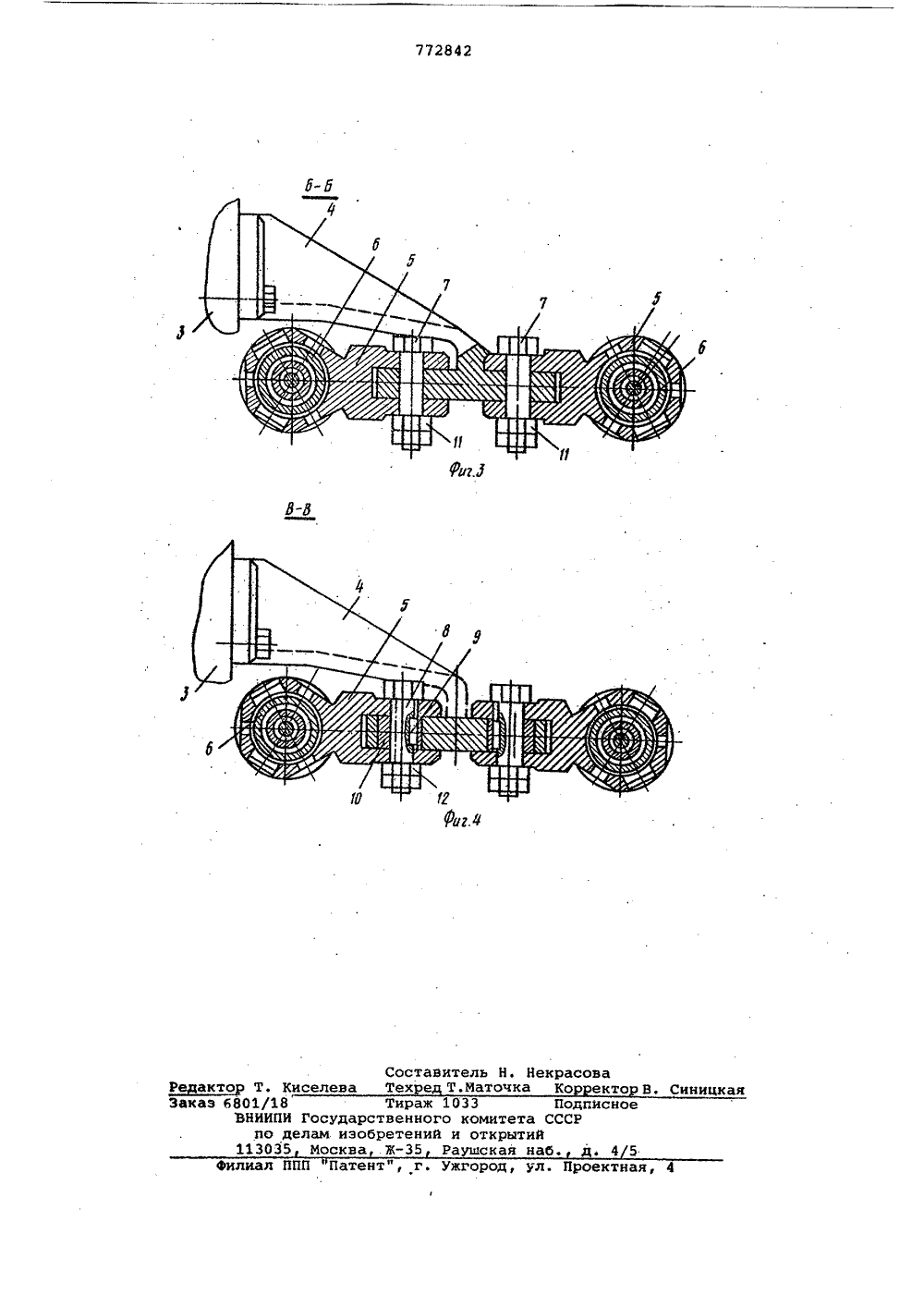
Союз Советских Социалистических РеспубликОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ нц 772842(22) Заявлено 16. 04. 79 (21) 2767141/25-08с присоединением заявки Ио -В 253/04 Государственный комитет СССР ао дедам изобретениЯ и открытий(54) РОБОТ Изобретение относится к машиностроению и может быть использовано для подачи деталей к стайкам.Известен робот, содержащий руки икаретку с установленными на ней корпуссами рук 11.Недостатком известного роботаявляется сложность его применениядля станков, отличающихся размерными характеристиками, из-за.отсутствия дополнительной степени свободыРук робота.Цель изобретения - расширение функциональных возможностей робота эасчет обеспечения дополнительной 15степени свободы рук,Цель достигается тем, что корпускаждой руки установлен на кареткес помощью двух пальцев, один из которых является осью вращения корпуса 2 Оруки, а второй. палец имеет расположенную в каретке эксцентричнуюотносительно собственной оси вращения, размещенной в корпусе руки,часть.На фиг. 1 изображен предлагаемыйробот, общий вид; на фиг, 2 - видА на фиг. 1; на фиг, 3 - разрезБ-Б на фиг. 2; на фиг 4 - разрезВ-В на фиг. 2. 30 Робот включает в себя транспортный путь 1, на котором закрепленынаправляющие 2 с установленной наних кареткой 3. На каретке 3 .закреплен кронштейн 4, на которомустановлены корпуса 5 каждой изрук 6 с воэможностью поворота относительно пальца 7. Палец 8 связанпосредством шпонкн 9 с расположенной в продольном пазу кронштейна 4 втулкой 10, эксцентричной относительио его оси вращения, размещенной в корпусе 5. Корпуса 5 зафиксированы на кронштейне 4 с помощью гаек 11 и 12. На руках б установлены захваты 13.Перед работой робота налаживают следующим образом.При получении команды от ручного пульта управления каретка 3 от исходного положения перемещается вдоль направляющих 2 транспортного пути 1 в позицию загрузки металлоре" жущего станка (не показан), в центрах которого зажата контрольная оправка и производится раскрытие захвата 13. Затем корпус 5 руки б расфиксируется на кронштейне 4 отворачиваыием гаек 11 и 12 пальцев 7 и 8 и рука 6 по команде от ручного пульта управления перемещается к контрольной оправке, После чего вручную вращают палец 8, который благодаря шпонке 9 вращает и втулку 10, эксцентричную относительно пальца 8, заставляя тем самым корпус 5 вместе с рукой б и захватом 13 поворачиваться относи" тельно пальца 7. Далее по команде от ручного пульта управления перемещают руку б вместе с захватом 13 к контрольной оправке и зажимают ее. Таким образом добиваются высокой точности совпадения точки позицирования захвата 13 с осью центров металлорежущего станка.После этого в систему .управления вводится координата этой точки позиционирования, а также вращением гаек 11 и 12 производится фиксирование корпуса 5 на кронштейне 4.Затем рука б с захватом 13 перемещается в верхнее положение. После чего аналогичные операции производят и со второй рукой.После этого каретка 3 отводится в исходное положение. Далее по команде от системы управ. пения каретка 3 перемещается к позиции захвата заготовок и одна из рук 6 опускается к заготовке, захватывает ее захватом 13 и перемещает ее в верхнее положение. Затем каретка 3 перемещается к позиции загрузки станка и осуществляет установку заготовки на станок. Затем в процессеобработки заготовки каретка 3 возвращается и захватывает схватом 13 следующую заготовку. После чего каретка 3 перемещается на позицию загрузки станка. После окончания обработки один из схватов 13, свободный от заготовки, захватывает готовую деталь, перемещая ее рукой б в верхнее положение, а второй схват 13 устанавливает на станок новую заготовку. После чего каретка 3 перемещается в позицию выгрузки готовых деталей и схват 13, разжимаясь, устанавливает ее на разгрузочное устройство, Затем каретка 3 возвращается в исходное положение и цикл повторяется.Формула изобретенияРобот, содержащий руки и кареткус установленными на ней корпусами 26 рук, о т л и ч а ю щ и й с я тем,что, с целью расширения функциональных воэможностей, корпус каждой рукиустановлен на каретке с помощью двухпальцев, один из которых является 2 осью вращения корпуса руки, а второйпалец имеет расположенную в каретке эксцентричную относительно собственной оси вращения, раэмещенцой вкорпусе руки, часть.ЗО источники информации,принятые во внимание при экспертизе1. Промышленный робот, обслуживающий шлице-шлифовальный автоматмодели МШ 278, представленный впроспекте на этот автомат, М.,772842 Риь ева е ираж 1033 Под енного комитета СССР тений и открытий -35 Раушская наб. ное иал ППП Патент", г. Ужгород, ул. Проектн,д ктоо Т, Киселв 6801/18ВНИИПИ Госпо делам113035 Мо арств зобре ва Ж ставитель Н. Некрасовах е Т.Яаточка Ко екто В, Синицкая
СмотретьЗаявка
2767141, 16.04.1979
ПРЕДПРИЯТИЕ ПЯ В-8889
СОМИН ЮРИЙ ДМИТРИЕВИЧ, КАЛИКО ЕФИМ ЗАХАРОВИЧ
МПК / Метки
МПК: B25J 3/04
Метки: робот
Опубликовано: 23.10.1980
Код ссылки
<a href="https://patents.su/4-772842-robot.html" target="_blank" rel="follow" title="База патентов СССР">Робот</a>
Механическая рука робота

Номер патента: 1289678
Опубликовано: 15.02.1987
Авторы: Бойко, Болтян, Брюшин, Горобец, Игнатов, Поздняков
МПК: B25J 11/00
Метки: механическая, робота, рука
...скоростью (фиг. 5). При этом шток 30 выдвигается из приводного цилиндра 28, а шток 31 вдвигается в приводной цилиндр 29 таким образом, что выходной вал 21, не проворачиваясь относительно двух фрикционных колодок 22 и 23, поворачивается вместе с фрикиионными колодками на необходимый угол. При такой низкой скорости доворота устраняется влияние инерционности подвижных частей руки и двигателя 1 на тормозной путь при Остановке выходного вала 21, Растормаживание блокировочного устройства происходит при вдвигании обоих штоков 30 и 31 в приводные цилиндры 28 и 29 (фиг. 3), закрепленные за уголки 32 и 33 к звену 19. Разжатие обеих фрикционных колодок 22 и 23 относительно выходного вала 21 происходит за счет пружины сжатия 35. Обе фрикционные...
Рука робота

Номер патента: 1313693
Опубликовано: 30.05.1987
Авторы: Голубовский, Русецкий
МПК: B25J 11/00
...продольную направляющую 4, установленную параллельно на корпусе силового цилиндра 2, и разгрузочное устройство, выполненное в виде Г-образного кронштейна 5, одна (меньшая) полка 6 которого смонтирована непосредст. венно на захватывающем устройстве, а вторая (большая) полка 7 снабжена направляющей втулкой 8, установленной с возможностью перемещения вдоль продольной направляющей 4. На второй полке 7 Г-образного кронштейна установлен опорный элемент 9, а на корпусе силового цилиндра 2 шарнирно, при помощи шарнира 10, установлен рычаг 1 с противовесом 12. Опорный элемент 9 оснащен втулкой 13, установленной с возможностью регулировочного перемещения относительно второй полки 7 Г-образного кронштейна и фиксации на нем при помощи зажима 14....
Способ контроля точности перемещений руки робота

Номер патента: 896369
Опубликовано: 07.01.1982
Метки: перемещений, робота, руки, точности
...качестве иэмерительноиспользуют направляющую ивдоль нее измерительную голпором измерительного накончение робота выполняют переруки по направляющей при занаконечнике, а измерение пообработки в автоматическомрасс топоренном,896369 ВНИИПИ Заказ 11676/25 Тираж 613 Подписное филиал ППП Патент, г, Ужгород, ул. Проектная, 4 На чертеже представлена схема реализации способа контроля точности перемоцения руки робота,Способ осуществляется следующим образом.Схват 1 руки 2 робота 3 шарнирносоединяют в измерительным наконечником 4 измерительной головки 5: Дляобучения робота измерительный наконечник застопоривают с помощью винта 6,после чего перемещают измерительнуюголовку по направляющей 7 (в относительном перемещении по направляющейголовка должна...
Устройство перемещения руки робота

Номер патента: 905065
Опубликовано: 15.02.1982
Авторы: Загороднюк, Корнеев, Попков, Щепетков, Яцкевич
МПК: B25J 17/00
Метки: перемещения, робота, руки
...3 и руки 4. Торцовые части втулок 1 и 2, перемещаясь друг по другу, поворачивают ось руки 4 относительно оси основания 3 на вполне определенный угол, величина которого зависит от взаимного разворота втулок. Для предотвращения взаимного разворота руки 4 и основания 3 служит карданный вал 5. В зависимости от движения втулок 1 и 2 относительно друг друга возможны варианты работы устройства.Вариант 1 (фиг. 2). Раздельная работа втулок. Втулка 1 неподвижна, втулка 2 вра 905065щается в том или ином направлении. Траектория точек руки представляет собой окружность на поверхности сферы, проходящую через ось основания (эллипс в плоскости, перпендикулярной к оси основания). Положение окружности определяется положением скошенного торца...
Рука робота

Номер патента: 1146195
Опубликовано: 23.03.1985
Авторы: Бернатонис, Каваляускас, Петров, Сабаляускас
МПК: B25J 11/00
...Филиал ППП Патент, г. Ужгород, ул. Проектная, 4Изобретение относится к исполнительным органам промышленных роботов и манипуляторов, применяемых во всех областях народного хозяйства.Известна рука робота, содержащая стержень, на одном конце которого размещено захватывающее устройство, дополнительную подвижную опору в виде силового цилиндраа и разгрузочное устройство 1 ) .Недостатками известного устройства являются низкая грузоподъемность и сложность конструкции.Цель изобретения - увеличение нагрузочной способности, улучшение динамических характеристик, упрощение конструкции. Цель достигается тем, что в руке робота, содержащей стержень, на одном конце которого размещено захватывающее устройство, дополнительную подвижную опору, привод в...
Предыдущий патент: Герметичный манипулятор
Следующий патент: Захват манипулятора
Случайный патент: Муфта для компенсации угловых смещений соединяемых валов