Центробежный стенд для моделирования параметров движения
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
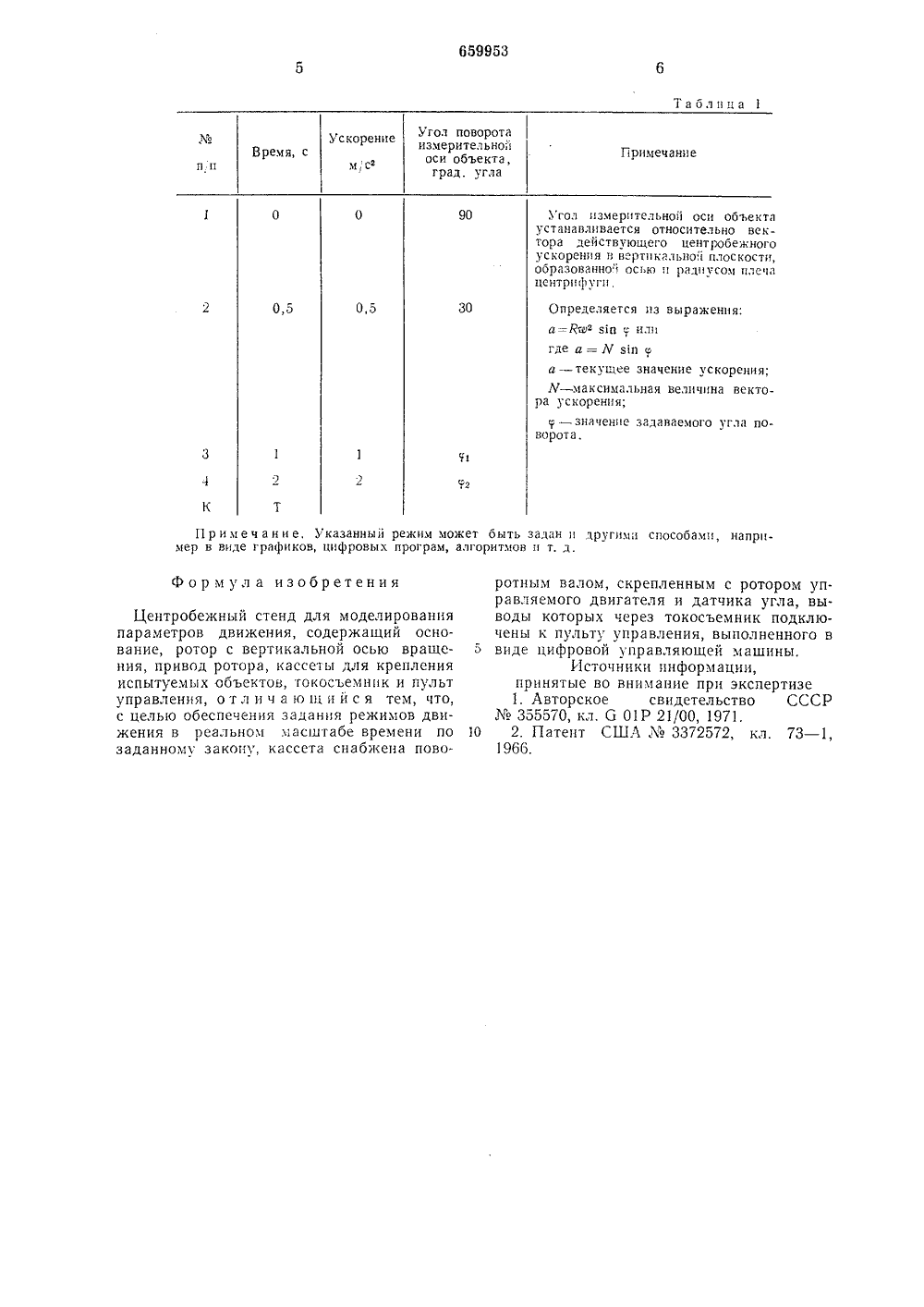
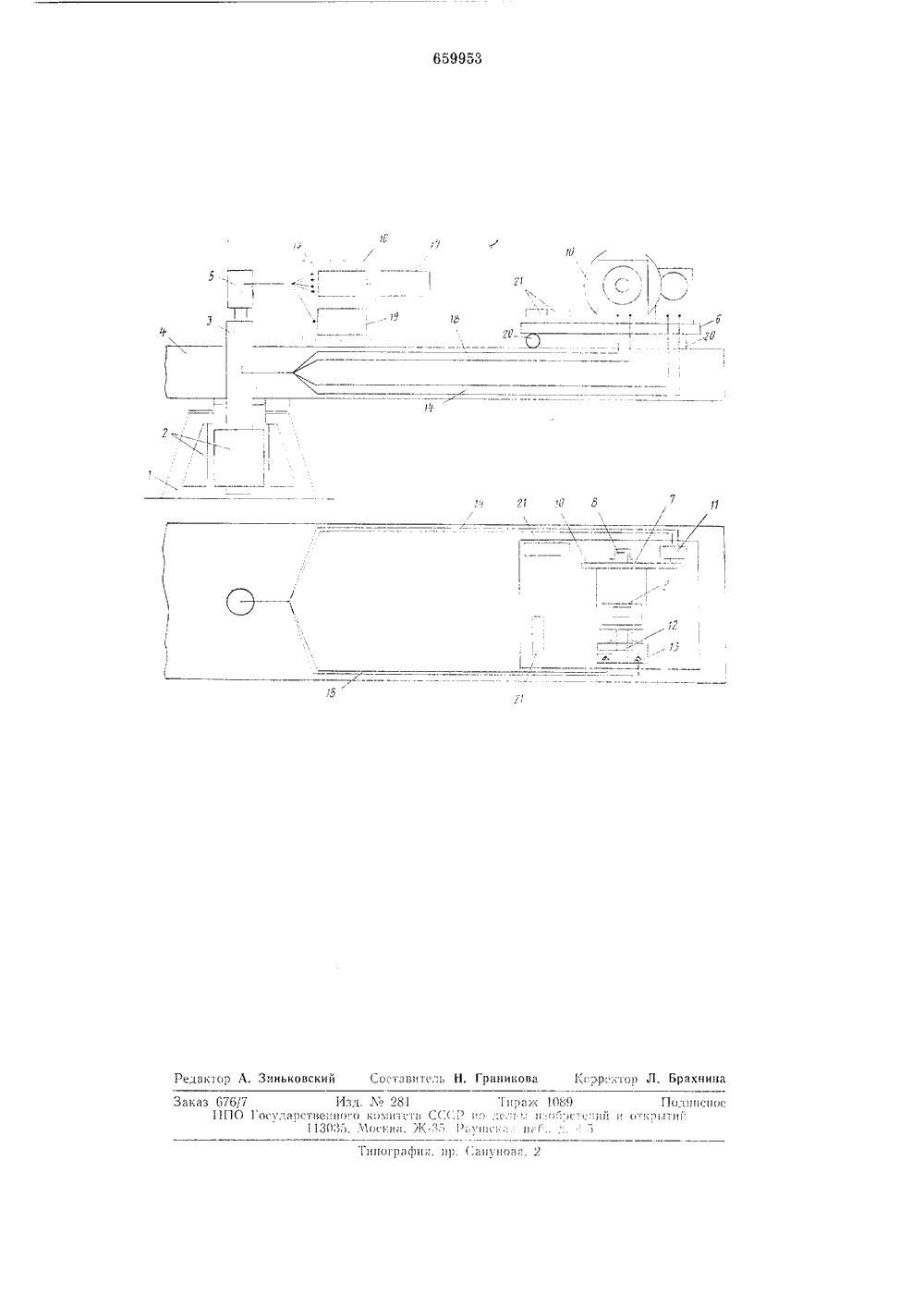
1 ) 659953 ОПИСАН И Е изоьеЕтЕНИЯ ооиц Советских Социалистических Республик(21) 2050457/18 Заявлено 09.08,74 Кл.а6 01 Р 21/О кис присоединениех Государственный комет СССРгетин 5) Дата опубликова ия описания 30.04.7(72) Авторы изобретения ков и И. П. Поляков(71) Заявитсл ЕН ОВ В резу льта отличительных устройство о ных режи 5 мов ния как прост 0 и весьма сложИзобретение относися к испытатсльнои технике. Оно ьОнет быть использовано для испытания объектов на воздействие центробекного ускорения,Известны устройства для испытания различных объектов на воздействие центробежного ускорения 1.Наиболее близким по технической сущности является устройство, содсрка 1 цее Основание, ротор с всртикальцой осью вращения, привод ротора, кассеты для крепления испытуемых объектов, токосъемник и пульт управления.Задавая угловые скорости вращения, можно воспроизводить на поворотных платформах в горизонтальной плоскости различные, не связанные между собой во времени, элементы движения.Однако в известном устройстве необходимо осуществлять синхронизацию в каждой точке, Кроме того, в нем наблюдаются переходные процессы при синхронизации, создающие значительные искажения в задаваемых режимах движения, а также изменения величины и знака задаваемой величины ускорения при установке заданной точки характеристики по причине изменения (при вращении или повороте вокруг вертикальной оси платформы) пространственного положения испытуемых объектов ЛЯ МОДЕЛИРОВАНИИЖЕНИЯ относительно плоскости, в которой действуст вектор центробежного ускорения, задаваемые центрифугой (плоскость, образованная вертикальной осью вращения и ра диусом плеча центрифуги).Все это цс дает возаОжцоси применитьего для испытан;й объектов ца воздействие сВ 51 занных мсжд сооой элсмсцтОВ (рож 1- мов) двии(с 11 и 51 В реал 5 цоь мас 1 цт(1 бс Врс мсци по заданному закону 21.Цслыо изобретения является обссцсчсцисзадания рси(иОВ двии(ения в реальном масштабе времени по заданному закону,Для этого в центробежном стенде для 15 моделирования параметров движения, содержащем основание, ротор с вертикальной осью вращения, привод ротора, токосъемник и пульт управления, кассета снабжена поворотным валом, скрепленным с ротором 20 управляемого двигателя и датчика угла,Вь 1 воды которых через токосъемник подключены к пульту управления, выполненного в виде цифровой управляющей машины. те использования указанныхпризнаков предложенное сспечиваст задание разл 1 шдвижения для воспроизвсдсых элементов движения, так ных, например разгон объек 659953та по заданному закону (линеному, сицусоидальному и др.) с изменением направления ускорения (реверс) в реальном масштабе времени, с имигацией аварийных режимов (столкновений, потери устойчивостиит.д,),На чертеже приведена схема конструкции стенда,Центробежный стенд для моделированияпараметров движения содержит цеподвижцую стаПшу 1, привод 2 цснгрифугц, вертикальную ось 3 вращения центрифуги, ротор 4, токосъсмпик д, Оазовыс платформы6, кассету Г, выполне 1 ну)о в виде иоворотпо-угломерного устройства Стола) для 15крепления испытуемого объекта, в которуювходят ось 8 вращения касссгы, кронштейн9 для крепления испытуемых объектов, ведущсе колесо 10, поворотный привод 11, угломсрньш диск 12, считывающая головка 2013, соединительные провода 14, пульт управления 15, программный регулятор 16 напряжения, источник электроэнергии 17, соединительные провода 18 считывающей головки 13, регистратор 19 углового положеция кассеты 7, устройство 20, предназначенное для выставки базовой платформы 6,, ров 1 И 21 горизонта.На неподвижной станине 1 установленэлектромеханический привод 2 с верти- Зокальной осью вращения 3, ца которои укреплен ротор 4. На оси 3 установлен токосъсмцик 5, служащий дл 51 Обеспечени 5ЭЛСКТРИ 1 ССКОЙ СВ 513 И Э;1 ЕМСЦТО, МСТЯ 1 ОВЛЕЦиых ца ьращяющсмся ро(орс 4 и ня цс; о;движцом пульте .правления 15).На плечах ротора 4 (стацовлены базоьыс платформы 6 с устройством 20. Някаждой б 230 ВОЙ цла 1 форъ 1 е 6 установленыуровни 21 и кассета 7 для крсцлснця 1 спь 1- .;0уемых обьектов, выполненная в виде поворотно-угломерного устройства. Кассета 7В 1,151 олпспа следующим образом.Ня оси 8 вращения кассеты 7 укрепленыведущее колесо 10, сосдшсцные с приводом11 кронштейн 9 и угломсрцый диск 1). Г.оосцо (. угломГрным диском 12 ца бязово,"платформе 6 устяцвлепя с(гываюшяя го 1 Овк(1 11, выхОД к 010 рои цДк)110 1(.и 00 едици Г(.1(н 1)1 л 1 1 рБодал и8 ч(1)Сз токОО 1 ем )(ИИ 1. 5 к регистратору 1, у( Г (пвлсцшгмуцультс упряВлсни 5 15).ПоворОтпыЙ привод 11 ПОдкл 101 сц со(дишггсльцыми проводами 14 через Окосьсмцик 5 и программный регулятор 16 ксто: 00нику электроэнергии 17, установленныхцульгс управления 15.Устройство работает следующим образом.Э т а п подготовки. На этом этапе 00составляют программу задания режимадвижения в реальном масштабе времени позаданному закону, устанавливают объекты на базовой платформе б, производят их выставку в горизонт с помощью устройства 20, Осуществляют пуск центрифГги, разгон до заданной скорости вращения, синхронизацшо и стабилизацию угловой скорости вр а щения. Эта и воспроизведения з ада иного ре)кима движения. На этом этапе производится поворот кассеты 7, на которой укреплены испытуемые обьекты на задаицы( у го.1 в поле цсцрооежного ,скорения цснчрифуги, Выполнение кассеты 7 в виде поворотно-угломерного устройства позволяет обеспечить поворот ее, а следовательно, и испытуемых объектов, на угол -+350 и с возможностью реверса и фиксации в любой точке.Поворот кассеты 7 может быть выполнен за весьма короткое зремя, легко управляется и контролируется. Это обеспечивает возможность задания как простого, так и весьма сложноо режима дижеия Ооъектов 3 реальном масштабе времени с высокой то:постыл по заданной программе.Например, требуется воспроизвести режим разгона объскта по ускорению в диапазоне от 0 м/с до 5( м/с- прп линейном возрастании ускорсгшя в интервале времен ОтОДО Тс.Программы задания режима приведена в табл. 1.Кассета 7, установленная на базовой платформе 6 В положении пулевой чувствитс,(ы;осп (Для испытуемых объектов) поорячивается (с помощью поды и нацря)кения от исто шика электроэнергии 17 срез программный регулятор 16 и токосъсмник 5 на поворотный прцвод 11) на угол 90 с ускорением от 0 м,с до Л м,с- по сицусоидальному закону,Информация о величине и скорости поворота кассеты 7 снимается с рсгистрятора 19.После проведения поворота кассеты 7, си)гпя и фиксации рсзультатов задания рсЖИ 112 ВТГ)РОЙ ЭТЯЦ ЗЯКЯЦ 1 ИВЯ(С 51, И ЦСПТРИ. фугу станаливяот. Зяк(ц зад;Иия движ(ниц мож(Г 1 (А)1 с 1.1 сОжив с зме 1 СПИ(.М ВР("4(5(И ЗЯДЯЦИ 51, Р( РГ(, Г(0 ТОРЕ Ц и 51 11 Т. Д,)ГГКСИМЯЛ 1251 СкорОС 3 ЯДЯИ 51 ре)КИМ;: црсд(лястс 51 .12 ксимяльцо возможной сксросп к) поворота кассеты ня заданный угол,Дл)1 уменьшения цогр(.шцостей от изменения длины плеча центрифуги центр ъ 12 сс испытуемых Объектов необходимо размещать на оси вращения кассеты 7,Учет влияния составляющей гравитационного поля Земли необходимо производить, исходя из измерения углового положения испытуемого объекта относительно вектора гравитационного поля.659953 Габлца 1 Угол поворота измерительной оси объекта,град. углаПримечание Время, с п п 90го 1 измеритетьнооси ооъектт устанавливается относительно вектора действующего центробежного ускорения в вертикальной плоскости, образованной осью и радиусом плс 1 центрифуги,30 0,5 0,5 Определяется из выражения:а=Вы ьппилигде а= И зп а а - текущее значение ускорения; Ю в максимальн величина вектора ускорения;- значение задаваемого угла поворота. П р и и е ч а н и е, Указанный режим может быть задан и другими способами, например в виде графиков, цифровых програм, алгоритмов и т, д,Формула изобретения Центробежный стенд для моделирования параметров движения, содержащий основание, ротор с вертикальной осью вращения, привод ротора, кассеты для крепления испытуемых объектов, токосъемник и пульт управления, о т л и ч а о и и й с я тем, что, с целью обеспечения задания режимов движения в реальном масштабе времени по заданному закону, кассета снабжена поворотным валом, скрепленным с ротором управляемого двигателя и датчика угла, выводы которых через токосъемник подключены к пульту управления, выполненного в5 виде цифровой управляющей машины,Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССР355570, кл. С 01 Р 21/00, 1971,10 2, Патент СШЛ3372572, кл. 73 - 1,1966.
СмотретьЗаявка
2050457, 09.08.1974
ПРЕДПРИЯТИЕ ПЯ А-1001
НОВИКОВ ЕВГЕНИЙ ИВАНОВИЧ, ПОЛЯКОВ ИОСИФ ПАВЛОВИЧ
МПК / Метки
МПК: G01P 21/00
Метки: движения, моделирования, параметров, стенд, центробежный
Опубликовано: 30.04.1979
Код ссылки
<a href="https://patents.su/4-659953-centrobezhnyjj-stend-dlya-modelirovaniya-parametrov-dvizheniya.html" target="_blank" rel="follow" title="База патентов СССР">Центробежный стенд для моделирования параметров движения</a>
Устройство для контроля синхронности вращения двух объектов

Номер патента: 773495
Опубликовано: 23.10.1980
МПК: G01P 3/56
Метки: вращения, двух, объектов, синхронности
...фотоприемник 5. Статор 2 и ротор 4 кинематически связаны с объектами контроля механическими связями 6 и 7. На стойке установлен диск 8. Фотоприемник 5 подключен через амплитудный селектор 9 к блоку 10 определения абсолютной скорости и блоку773495 на выходе блока определения относительной скорости сигнал отсутствует. При неподвижном роторе сигнал отсутствует на выходе блока определения абсолютной скорости. Формула изобретения разделяются и подаются на входы соответИсточники информациин1 ствующих блоков определения скоростеи попринятые во внимание при экспертизе астоте сигналов.1. Авторское свидетельство СССР по заПри отсутствии скольжения частота сиг- явке2548297/18-11, кл. б 01 Р 3/56; пала относительной скорости равна нулю и Зо В 60...
Приспособление для управления включением и выключением сцепных муфт на валу динамо-машины могущей приводиться в движение от турбины и от вагонной оси

Номер патента: 29485
Опубликовано: 31.03.1933
Автор: Воротников
МПК: B60K 25/08, B61D 29/00
Метки: вагонной, валу, включением, выключением, движение, динамо-машины, могущей, муфт, оси, приводиться, сцепных, турбины
...с приводом передачи от колеса вагона.На чертеже фиг. 1 схематически изображает вид сбоку предлагаемого при- способления; фиг. 2 - то же, вид сверху.На впускной трубе паровой турбины установлен цилиндр 22, который вмещает в себе поршень 23, шток 24 коего связан с отводками 2 и 2, при чем с отводкой муфты 3 на валу между динамомашиной и турбиной он связан при посредстве тяг 5 и 7, а с отводкой муфты 3, расположенной на валу между динамомашиной и приводом от колеса вагона, - непосредственно.Во время хода поезда, шток поршня отжимается пружиной 25, и тогда муфта 3 сцепляет вал динамомашины с приводом от колеса вагона, а муфта 3 расцепляет вал динамомашины с валом турбины. В случае же остановки поезда производится впуск в турбину пара,...
Устройство для определения параметров вращения объекта

Номер патента: 1765771
Опубликовано: 30.09.1992
Автор: Китаев
МПК: G01P 3/489
Метки: вращения, объекта, параметров
...схема предлагаемого устройства; на фиг. 2 - временная диаграмма работы устройства,Устройство (фиг, 1) содержит датчики 1 и 2 импульсов, выходы которых подключены к входам первого 3 и второго 4 формирователей соответственно и к входам элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 5, выходы формирователей 3 и 4 подключены соответственно к первым входам элементов И 6, 7, к вторым входам которых подключен выход элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 5, выходы элементов И 6, 7 подключены соответственно к первому и второму входам реверсивного счетчика 8, Датчики 1 и 2 импульсов представляют собой единый датчик перемещения объекта.Устройство работает следующим образом,Сначала рассмотрим случай вращения вала объекта по часовой стрелке, которому соответствуют временные...
Механизм для прерывистого вращения рабочего объекта

Номер патента: 1010360
Опубликовано: 07.04.1983
Авторы: Зверев, Падерно, Пантелеев
МПК: F16H 27/06
Метки: вращения, механизм, объекта, прерывистого, рабочего
...видешестеренчатой передачи, ограничиваетвозможность изменения соотношенияпериодов останова и вращения рабочего объекта,Целью изобретения является повышениеточности и надежности позиционирования рабочего объекта при лю.бом соотношении периодов его вращения и останова.Указанная цель достигается тем,что в механизме для прерывистоговращения рабочего объекта, содержа"щем привод, ведущий и ведомый валы,установленный на последнем кривошип,взаимодействующий с пазами мальтийского креста, связываемого с рабочимобъектом, узел, передающий вращениекривошипу, и узел программного управления, включающий пространственный кулачок, взаимодействующий с нимрычаг и фиксатор положения рабочегообъекта, последний выполнен с упором,и соединен с рычагом, а узел,...
Устройство для контроля скорости движения исполнительных органов приводов

Номер патента: 313154
Опубликовано: 01.01.1971
Авторы: Андрюхин, Бакалов, Полин, Шорников, Шутков
МПК: G01P 3/22
Метки: движения, исполнительных, органов, приводов, скорости
...3. Измерительная схема содержит релейный блок 18, интегратор 19 со схемой 20 балансировки нуля и индикатор 21.Релейный блок 18 выделяет единичные импульсы из их периодической последовательности, получаемой с помощью датчика при возвратно-поступательном движении контролируемого органа. Релейный блок содержит ; нопку 22, переключатели 28, 24 и два кон:актных реле 25 и 26, запитываемых напряжением У Индикатор 21 подключен к выхоу интегратора 19. С помощью переключателя 28 на релейный блок 18 пропускаются прямоугольные или пилообразные импульсы с датчика, соответствующие направлению движения привода. Переключатель 24 служит для сброса показаний индикатора 21.При непрерывном возвратно-поступательном движении привода датчик импульсов выдает...
Предыдущий патент: Устройство для контроля скорости вращения
Следующий патент: Подвижная часть магнитоэлектрического измерительного механизма
Случайный патент: Устройство для считывания информации