Устройство для определения положения якоря индукторного шагового электродвигателя с резистивно-емкостными модулями в виде решетчатых обкладок на якоре и индукторе
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
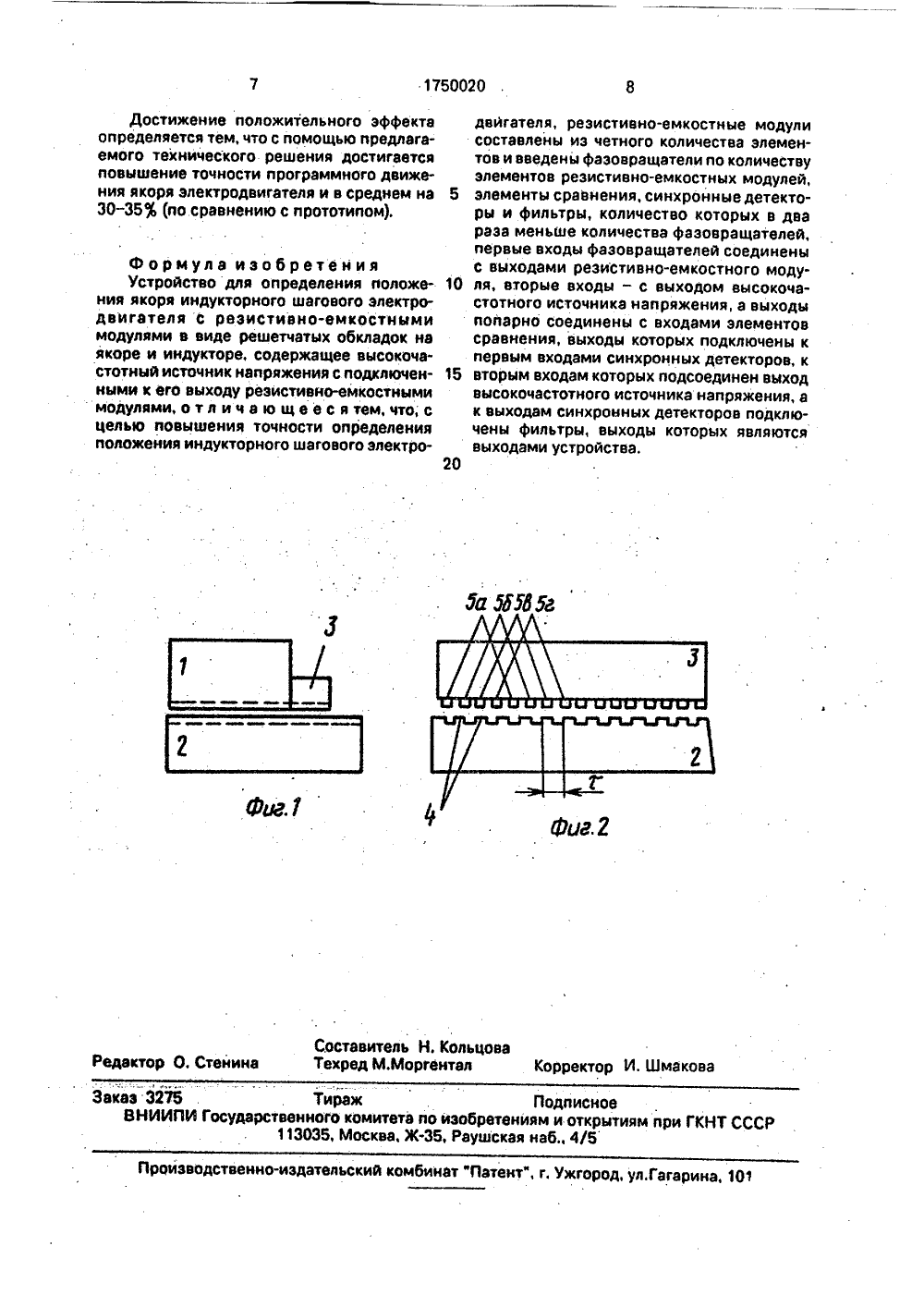
(51) 5 САНИЕ ИЗОБРЕТЕН ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИПРИ ГКНТ СССР К АВТОРСКОМУ СВИДЕТЕЛ. ЕДИЕВ, АВЯОШТ ЯНАРТ ЮСООМб ВУ САРАЯТЧЕ МЕТНОО, РСМ,СОЙРЕВЕИСЕ МЛЮСН, ОЙЕ, 6 - 8, 1989.(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯПОЛОЖЕНИЯ ЯКОРЯ ИНДУКТОРНОГОШАГОВОГО ЭЛ Е КТ РОД В И ГАТЕЛЯ С РЕЗИСТИВНО-ЕМКОСТНЫМИ МОДУЛЯМИ В ВИДЕ РЕШЕТЧАТЫХ ОБКЛАДОК НА ЯКОРЕ И ИНДУКТОРЕ(57) Использование; автоматизированные технологические и другие промышленные установки. Сущность: на якоре расположены чувствительные элементы датчика положения - резистивно-емкостной модуль 3 с четным числом элементов, на которые подают сигнал от высокочастотного источника напряжения 6, С емкостных элементов напряжение подают на фазовращатели 7, 8, 9, 10. Сигналы с четных и нечетных фазовращателей сравнивают в устройствах сравнения 11 и 12 и преобразуют синхронными детекторами 13, 14 и фильтрами 15, 16. На выходе получают сигналы вида 01=-Азп Ои 02=Асов О,З ил.ние точности определения положения индукторного шагового электродвигателя.Поставленная цель достигается тем, чтов устройстве определения положения якоряиндукторного шагового электродвигателя срезистивно-емкостными модулями в виде 50 решетчатых обкладок на якоре и индукторе, содержащем высокочастотный источник напряжения с подключенными к его выходу резистивно-емкостными модулями, емкостные элементы реэистивно-емкостных модулей соединены с входами четного числа фазовращателей, выходы которых соединены попарно с входами вычитателей,.соединенных выходами через синхронные детекторы с входами фильтров, выходы коИзобретение относится к электротехнике, в частности к шаговым электродвигателям поступательного перемещения, и может найти применение в автоматизированных технологических и других промышленных установках.Известны устройства для определения положения якоря шагового электродвигателя с использованием чувствительного элемента датчика положения якоря, размещаемого непосредственно на якоре двигателя,Недостатками известных устройств является сложность обработки информации с чувствительного элемента, связанная с использованием оптических элементов и светопроводов, светокоммутации и интерполяции измерительных сигналов. Кроме того, рассматриваемым устройствам присуща невысокая точность, определяемаяфлюктуацией сигнала чувствительного элемента датчика,Наиболее близким к предлагаемому по технической сущности является устройствоопределения положения якоря индукторного шагового электродвигателя, содержащее резистивно-емкостные модули в виде решетчатых обкладок на якоре и индукторе и высокочастотный источник напряжения, питающий указанные резистивно-емкостныемодули, сигнал с емкостных элементов которых используется для получения информации.Недостатком этого устройства являетсято, что используются емкостные элементысо сложной конфигурацией обкладок, что затрудняет их использование в длинно- мерных линейных и плоскопараллельных перемещениях. При этом усложняется емкостной элемент резистивно-емкостногомодуля и существенно снижается точность определения положения якоря электродвигателя,Целью изобретения является повыше 5 10 15203040 торых являются выходами устройства, а кроме того, вторые входы фазовращателей и синхронных детекторов соединены с генератором высокочастотного напряжения.Анализ информационного фонда показал, что выявленная совокупность признаков, согласно которой производят измерение положения якоря индукторного шагового электродвигателя, позволяет приобрести новые качественные характеристики, и в известных технических решениях в, полном обьеме не встречается.На основании изложенного можно считать, что заявленное техническое решение соответствует критерию "существенные отличия".Конкретный общественно-полезный результат, достигаемый заявляемой совокупностью признаков, заключается в повышении точности программного движения якоря электродвигателя, что позволит увеличить производительность и прецизионность оборудования,На фиг, 1 приведена упрощенная конструкция индукторного шагового электродвигателя, на фиг. 2 - упрощенная конструкция емкостного элемента с решетчатыми обкладками; на фиг. 3 - функциональная схема устройства для определения положения якоря шагового электродвигателя.Устройство, реализующее предлагаемый способ измерения положения якоря шагового электродвигателя, содержит" якорь 1 и индуктор 2, На якоре расположенй чувствительные элементы датчика положе ния - резистивно-емкостной модуль 3. Зубцы индуктора Шагового электродвигателя 2 с величиной зубцового деления т служат обкладками емкостного элемента, а обкладки емкостного элемента, связанные с якорем, выполнены в виде решетки, расположены параллельно зубцам индуктора и имеют взаимные сдвиги; 5 а относительно зубцов индуктора - нулевой, 56 - 3/4 к, 5 в - 1/2 т, 5 г - 1/4 сУстройство определения положения якоря индукторного шагового электродвигателя функционирует следующим образом.Сигнал от высокочастотного источника напряжения 6 нефиг, 3) подается на резистивно-емкостной модуль, с емкостных элементов которого напряжение подают на фазовращатели 7-10,Выходной сигнал с каждого 1-го фазовращателя 7, 8, 9, 10) в общем виде может быть записан в виде01 фОехе(2) О-О.х з 1 п (в г+ р) При определении положения якоря индукторного шагового электродвигателя ис пользуются четыре емкостных элемента 5 а, 56, 5 в и 5 г, емкость которых определяется зависимостями 25(3) 2 С вЯЗ 1 пе где Со и См - постоянная и переменная составляющие величины емкости злемен- .30 тов резистивно-емкостного модуля;х и О- соответственно мгновенное положение якоря электродвигателя относительне индуктора в метрических единицах и электрических радианах, 35Сравнивая (вычитая) сигналы с выходов фазовращателей 7 и 8, 9 и.10 с помощью устройств сравнения (вычитания) 11 и 12, получим соответственно высокочастотные сигналы Ов 1 и Ов 2: 40 40 ех вЯ СмпРи 1 + РВ 2 С 2 я 082:(4) и (3) получим: Из выражений (2)Р 1,2 - 2 агсгд в Я(Со -Ъ,4 - 2 агсгд в Я(Со + з 1 п 0); соз 6). 01=-АЗ 1 пд и 02 Асоз При подаче на вход резистивно-емкостного модуля синусоидального сигнала 0 Овхз 1 п в г, где Оех и в - соответственно амплитуда и круговая частота переменного напряжения, фазовый сдвиг сигнала на выходе 1-го фазовращателя будет определяться из выражения где В и С - соответственно активное сопротивление и емкость 1-го элемента резистивно-емкостного модуля (1=1, 2, 3, 4), при этом выходной сигнал 1-го фазовращателя имеет вид; С 1,2=Со Смз 1 п 2 Жх/Х;С 3,4=Со ф Смсоз 2 тх/т,2 и х/т=.О,Оог-02=0 х(з 1 п(в г+ у 1)- - з 1 п(в г+ а=20 хсоз(в г+ ,й.+а) З 1 п й.+Лй Аналогично получаем и длФ+ Ов 2 2 Овх (соз в г + д-=.2 х З 1 п2 Из зависимостей (2) и (3) получим необходимые выражения суммы и разности сдвигов фаз, используя зависимости: Так как СмСо, то можно приближенносчитать-. ;дф- й;,После преобразований высокочастотные напряжения выражаются зависимостями вида Ов 1=соз (в + ф)А з 1 п Й 082=соз (в г+ф)А соз О,Полученные напряжения представляют собой высокочастотные сигналы с круговой частотой в, с постоянным фазовым сдвигом ф и амплитудной модуляцией, причем амплитудная модуляция осуществляется синускосинусными функциями фактического положения якоря двигателя,Дальнейшее формирование сигналов осуществляют синхронными детекторами 13 и 14, управляемыми от генератора высокочастотного напряжения 6, и фильтрами 15 и 16, на выходах которых 17 и 18 получают сигналы вида1750020 Фиг оставитель Н, Кольцоехред М,Моргентал орректор И. Шмако ктор О, Стен каэ 32758 ЙИИОИ Г Подписноениям и открытиям при ГКНТ СССРая наб., 4/5 Тираждарственного комитета по изобр 113035, Москва, Ж, Рауш роМзводственно-издательский комбинат "Патент", г. Ужгород, ул. Гагар Достижение положительного эффекта определяется тем, что с помощью предлагаемого технического решения достигается повышение точности программного движения якоря электродвигателя и в среднем на 30-35% (по сравнению с прототипом). формула изобретения Устройство для определения положения якоря индукторного шагового электродвигателя с резистивно-емкостными модулями в виде решетчатых обкладок на якоре и индукторе, содержащее высокочастотный источник напряжения с подключенными к его выходу резистивно-емкостными модулями, о т л и ч а ю щ е е с я тем, что, с целью повышения точности определения положения индукторного шагового электродвигателя, резистивно-емкостные модули составлены из четного количества элементов и введены фазовращатели по количеству элементов резистивно-емкостных модулей, 5 элементы сравнения, синхронные детекторы и фильтры, количество которых в два раза меньше количества фазовращателей, первые входы фазовращателей соединены с выходами резистивно-емкостного моду ля, вторые входы - с выходом высокочастотного источника напряжения, а выходы попарно соединены с входами элементов сравнения, выходы которых подключены к первым входами синхронных детекторов, к 15 вторым входам которых подсоединен выходвысокочастотного источника напряжения, а к выходам синхронных детекторов подключены фильтры, выходы которых являются выходами устройства,20
СмотретьЗаявка
4877296, 24.10.1990
НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "МЕХАТРОН" МЕЖХОЗЯЙСТВЕННОГО ОБЪЕДИНЕНИЯ "КОНСОРЦИУМ СОДРУЖЕСТВО"
БАЛКОВОЙ АЛЕКСАНДР ПЕТРОВИЧ, РЯБОВ СЕРГЕЙ АНАТОЛЬЕВИЧ, ДОБРОСЛОВ ВЛАДИМИР ГРИГОРЬЕВИЧ
МПК / Метки
МПК: H02P 8/00
Метки: виде, индукторе, индукторного, модулями, обкладок, положения, резистивно-емкостными, решетчатых, шагового, электродвигателя, якоре, якоря
Опубликовано: 23.07.1992
Код ссылки
<a href="https://patents.su/4-1750020-ustrojjstvo-dlya-opredeleniya-polozheniya-yakorya-induktornogo-shagovogo-ehlektrodvigatelya-s-rezistivno-emkostnymi-modulyami-v-vide-reshetchatykh-obkladok-na-yakore-i-induktore.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для определения положения якоря индукторного шагового электродвигателя с резистивно-емкостными модулями в виде решетчатых обкладок на якоре и индукторе</a>
Электрический шаговый индукторно-реактивный двигатель

Номер патента: 1833952
Опубликовано: 15.08.1993
Авторы: Краснопевцев, Шватов
МПК: H02K 37/00
Метки: двигатель, индукторно-реактивный, шаговый, электрический
...(вид по стрелкам на фиг, 2); на фиг. 2 - то же, вид по ф стрелкам на фиг. 1. ОдНа немагнитном основании 1 установ- Од лен магнитопровод 2 со стержнем 3 (не показан), полюсными наконечниками 4 и (Я аксиально намагниченные магниты 5 со своим наконечником 6,Обмотка 7(не показана) размещена экс- с центрично относительно оси вращения вала 8, который установлен в подшипниках 9 и в несет ротор 10 с зубцами 11 в треть эубцового деления.1Зубец 12 и пара зубцов 13 выполнены на правом наконечнике 4, а зубцы 14 и 15 - на левом наконечнике 4, Элементами креп ления служат, например, колонки 16 и винты 17.При отсутствии тока в обмотке 7 зубцы12- 15 подмагничены потоком магнитов 5 иротор 10 занимает положение согласнофиг, 8,При появлении тока...
Цифровой датчик углового положения вала шагового двигателя

Номер патента: 364956
Опубликовано: 01.01.1973
Автор: Ордынцев
МПК: H03M 1/26
Метки: вала, датчик, двигателя, положения, углового, цифровой, шагового
...редуктора И.Кодовый диск 1 фиг. 2) имеет одну кодовуюдорожку И 1, состоящую из восьми участков, выполненных из материала, имеющего ферромагнитные свойства (зачернены) и восьми участков из парамагнитного материала. Длины участков 2, 4, 5, б, 9, 10, 11 и 15-го равны А 1, 3, 8, 12 и 13-го - 2 Й, 14-го - Зд, 16-го - 5 д, а 7-го - бд (где Й - 1/32 длины кодовой дорожки). Нумерация участков произведена от оси ОК в направлении против часовой стрелки, 2 Над кодовой дорожкой расположены пятьиндукционных датчиков. Расстояние между осями датчиков равно 2 АЦифровой датчик работает следующим обПри поступлении управляющего импульса1 шаговый двигатель поворачивает ось 1 Ч на -К полного оборота (К - число импульсов, необходимое для полного оборота,...
Фиксатор положения ротора шагового двигателя

Номер патента: 170102
Опубликовано: 01.01.1965
Авторы: Герцов, Ивоботенко, Катков, Луценко, Минкинг
МПК: H02K 37/22
Метки: двигателя, положения, ротора, фиксатор, шагового
...уменьшения магнитного сопротивленияпаразитного воздушного зазора на валу шагового двигателя жестко укреплена втулка 9 из магнитной стали. Между втулкой и магнито проводом создается дополнительный воздушный зазор 10.Компенсационная обмотка фиксатора включена последовательно с обмоткой шагового двигателя в общий привод.20 Магнитоэлектрический фиксатор работаетследующим образом, В исходном состоянии обмотки шагового двигателя н обмотка фиксатора обесточены. Постоянный магнит создает магнитный поток, частично замыкающийся че рез шунт, а частично - через рабочий и паразитный воздушный зазоры. Этим создается фиксирующий момент, величина которого не ограничивается, поэтому он может быть сделан равным максимальному статическому синхро...
Способ выверки взаимного положения рабочих органов с шаговым исполнением рабочих элементов

Номер патента: 1825704
Опубликовано: 07.07.1993
МПК: B23P 19/02, F16H 27/02
Метки: взаимного, выверки, исполнением, органов, положения, рабочих, шаговым, элементов
...рабочих органов относительно друг друга число зубьев муфты должно быть связано с шагом элементов рабочих органов соотношением где и, - простое не имеющее общего делителя по отношению к числу шагов элементов рабочего органа число шагов зубчатой муфты.П р и м е р. Имеется трансмиссионный вал, на котором в качестве рабочих органов установлены две зубчатые шестерни с числом зубьев и = 20, шагом тр.о = 31,4 мм и диаметром делительной окружности О,о = 200 мм; Валы соединены между собой зубчатой муфтой с числом зубьев 31, шагом 15,7 мм и диаметром делительной окружности О = 155 мм.Приведенный к диаметру делительной окружности рабочего органа шаг зубьев муфты равен Ъ=15,7- -=20,26 мм,200155 Допустимое взаимное смещение зубьевшестерни Дцоп...
Способ программного управления шаговым перемещением посредством шагового электродвигателя и устройство для его осуществления

Номер патента: 1795861
Опубликовано: 09.07.1995
Авторы: Грудинин, Лалетин, Хорошавин
МПК: H02P 8/00
Метки: перемещением, посредством, программного, шагового, шаговым, электродвигателя
...статора у относительно неподвижных осей статора при поддержании амплитуды вектора тока неизменной (фиг,1),Из уравнения, описывающего поведение шагового привода (Ивоботенко Б.А Козаченко В.ф, Шаговый привод в робототехнике. М.: изд-во МЭИ, 1984) с 1 6с 1-г с 1 6 + с 19 + рС = 1 в в 1 п(З)г ЖЮб где С - собственная круговая частота колебаний ШЭП;ф - коэффициент эквивалентного вязкого трения; в - относительное значение амплитуды вектора тока статора;,ио - относительное значение моментанагрузки;О в . электрическая координата привода, имеему = 9+агсе 1 п - И 6(1)+р 911)+рСПР 1 в10 Динамическая ошибка, равная углу рассогласования полей статора (индуктора) иротора (якоря) шагового двигателя, определяетсяур - О = дн - агсзи р15 где,й -...
Предыдущий патент: Способ циклического стартстопного управления шаговым двигателем
Следующий патент: Автономный источник электроэнергии
Случайный патент: Ионообменная установка