Система определения метацентрической высоты судна
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
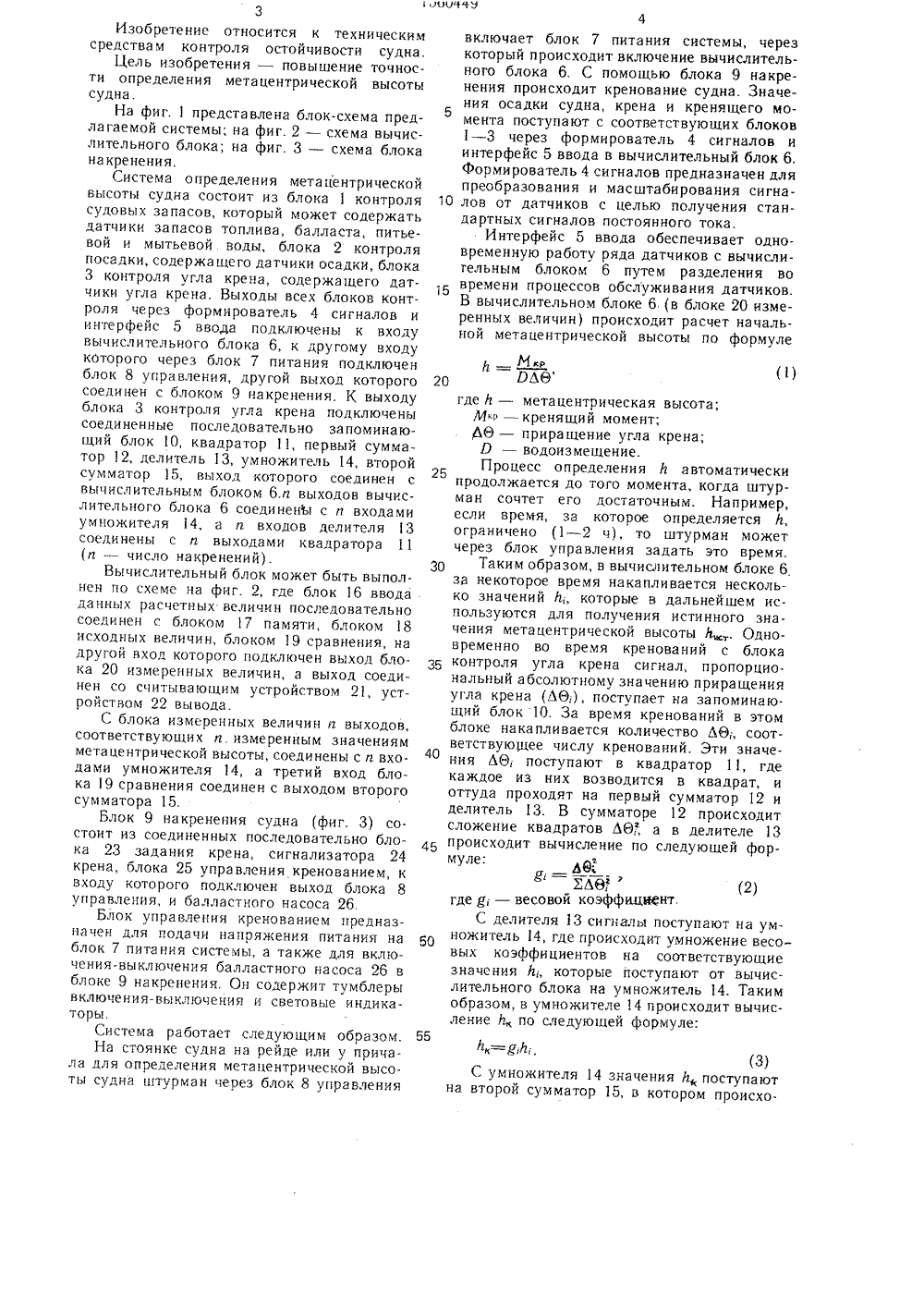
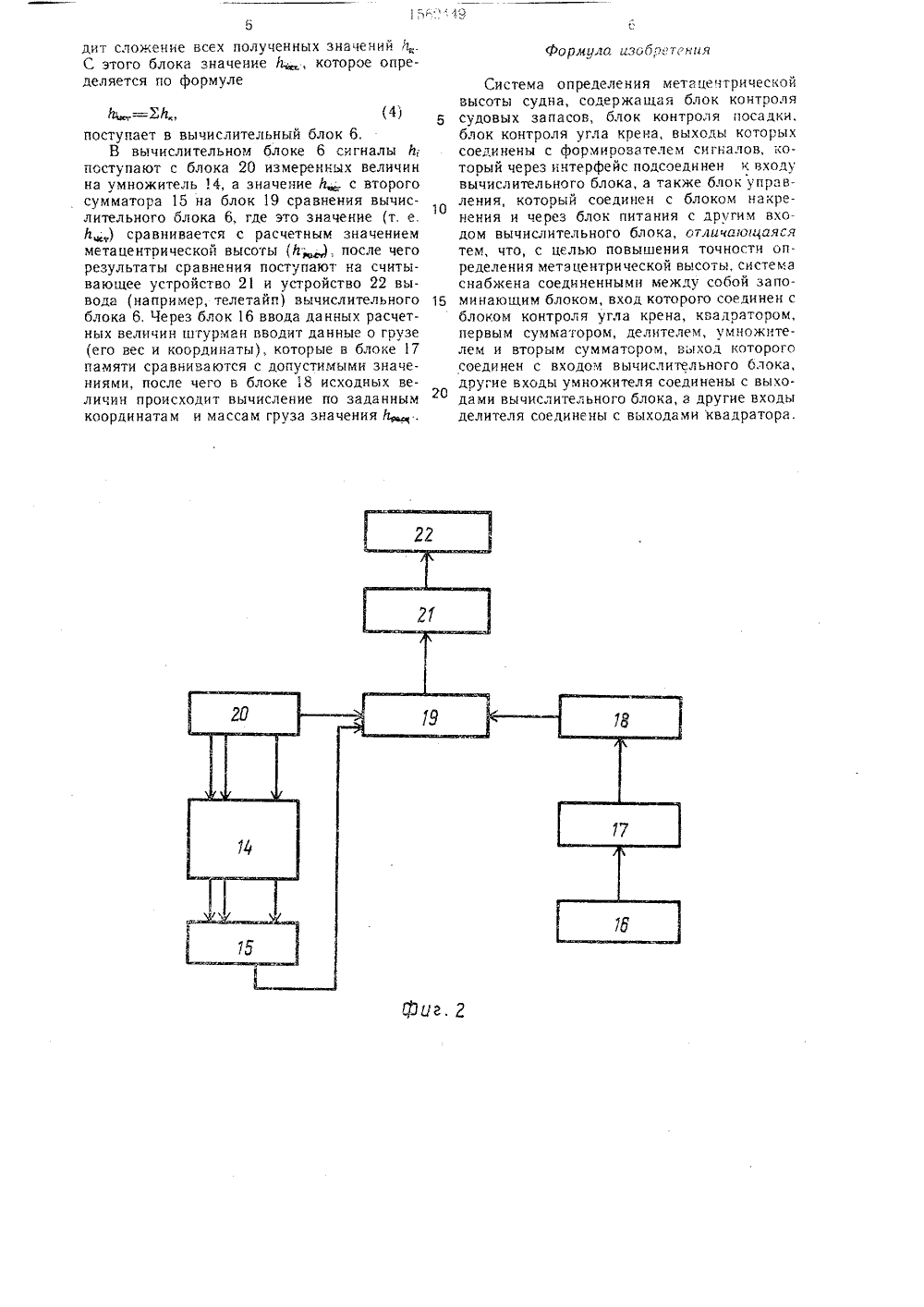
(51 ОМИТЕТТКРЫТИЯМ ГОСУДАРСТВЕННЫПО ИЗОБРЕТЕНИЯМПРИ ГКНТ СССР ОБРЕТЕНИ У СВИДЕТЕЛЬСТВУ ВТОРС вых зап контр о иены с рый че вычисл управл на крен входом вход ко тор 11 умножи выход другие выхода теля 13 3 ил,4 йь(54) СИСТЕМА ОПРЕДЕЛЕНИЯ МЕТАЦЕНТРИЧЕСКОЙ ВЫСОТЫ СУДНА(57) Изобретение относится к техническимсредства м контроля устойчивости судна.Цель изобретения - повышение точности определения метацентрической высоты судна,Система определения метацентрической высоты судна содержит блок 1 контроля судоасов, блок 2 контроля посадки, блок 3 ля угла крена, выходы которых соеди.формирователем 4 сигналов, которез интерфейс 5 подсоединен к входу ительного блока 6, а также блок 8 ения, который соединен с блоком 9 ения и через блок 7 питания с другимблока 6, запоминающий блок 10, торого соединен с блоком 3, квадрапервый с)мматор 12, делчтель 3, ,тель 14 и второй сумматор 15, которого соединен с входом блока 6, входы умножителя 4 соединены с ми блока 6, а другие входы делисоединены с выходами квадратора.51015 20 25 30 35 40 45 50 55 3Изобретение относится к технически м средствам контроля остойчивости судна,Цель изобретения - повышение точности определения мета центрической высоты судна.На фиг. 1 представлена блок-схема предлагаемой системы; на фиг. 2 - схема вычислительного блока; на фиг. 3 - схема блока накренения.Система определения мета центрической высоты судна состоит из блока 1 контроля судовых запасов, который может содержать датчики запасов топлива, балласта, питьевой и мытьевой. воды, блока 2 контроля посадки, содержащего датчики осадки, блока 3 контроля угла крена, содержащего датчики угла крена. Выходы всех блоков контроля через формирователь 4 сигналов и интерфейс 5 ввода подключены к входу вычислительного блока 6, к другому входу которого через блок 7 питания подключен блок 8 управления, другой выход которого соединен с блоком 9 накренения. К выходу блока 3 контроля угла крена подключены соединенные последовательно запоминающий блок 10, квадратор 11, первый сумматор 12, делитель 13, умножитель 14, второй сумматор 15, выход которого соединен с вычислительным блоком 6.п выходов вычислительного блока 6 соединен с и входами умножителя4, а и входов делителя 13 соединены с и выходами квадратора 11 (и - число накренений).Вычислительный блок может быть выполнен по схеме на фиг. 2, где блок 16 ввода данных расчетных величин последовательно соединен с блокомпамяти, блоком 18 исходных величин, блоком 19 сравнения, на другой вход которого подключен выход блока 20 измеренных величин, а выход соединен со считывающим устройством 21, устройством 22 вывода.С блока измеренных величин д выходов, соответствующих и. измеренным значениям метацентрической высоты, соединены с а входами умножителя 14, а третий вход блока 19 сравнения соединен с выходом второго сумматора 15.Блок 9 накренения судна (фиг. 3) состоит из соединенных последовательно блока 23 задания крена, сигнализатора 24 крена, блока 25 управления кренованием, к входу которого подключен выход блока 8 управления, и балластного насоса 26.Блок управления кренованием предназначен для подачи напряжения питания на блок 7 питания системы, а также для включения-выключения балластного насоса 26 в блоке 9 накренения. Он содержит тумблеры включения-выключения и световые индикаторы.Система работает следующим образом.На стоянке судна на рейде или у причала для определения метацентрической высоты судна штурман через блок 8 управления включает блок 7 питания системы, через который происходит включение вычислительного блока 6. С помощью блока 9 накренения происходит кренование судна. Значения осадки судна, крена и кренящего момента поступают с соответствующих блоков 1 - 3 через формирователь 4 сигналов и интерфейс 5 ввода в вычислительный блок 6.Формирователь 4 сигналов предназначен для преобразования и масштабирования сигналов от датчиков с целью получения стандартных сигналов постоянного тока.Интерфейс 5 ввода обеспечивает одновременную работу ряда датчиков с вычислительным блоком 6 путем разделения во времени процессов обслуживания датчиков.В вычислительном блоке 6 (в блоке 20 измеренных величин) происходит расчет начальной метацентрической высоты по формулеИкрВЛ 6где 6 - метацентрическая высота;Мр - кренящий момент;46 - приращение угла крена;0 - водоизмещение.Процесс определения Ь автоматическипродолжается до того момента, когда штурман сочтет его достаточным. Например,если время, за которое определяется Ь,ограничено (1 - 2 ч), то штурман можетчерез блок управления задать это время.Таким образом, в вычислительном блоке 6за некоторое время накапливается несколько значений 6;, которые в дальнейшем используются для получения истинного значения метацентрической высоты Ь . Одновременно во время кренований с блокаконтроля угла крена сигнал, пропорциональный абсолютному значению приращенияугла крена (ЛО;), поступает на запоминающий блок 10, За время кренований в этомблоке накапливается количество ЛО;, соответствую 1 цее числу кренований. Эти значения ЛО; поступают в квадратор 11, гдекаждое из них возводится в квадрат, иоттуда проходят на первый сумматор 12 иделитель 13. В сумматоре 12 происходитсложение квадратов Л 6 а в делителе 13происходит вычисление по следующей формуле:ХЛО, (2)где д; - весовой коэффицнЕнт.С делителя 13 сигналы поступают на умножитель 14, где происходит умножение весовых коэффициентов на соответствующиезначения Ь которые поступают от вычислительного блока на умножитель 14. Такимобразом, в умножителе 14 происходит вычисление Ьпо следующей формуле:и=ДА,(3)С умножителя 14 значения Ьпоступаютна второй сумматор 15, в котором происхо5дит сложение всех полученных значений Й. С этого блока значение /ц которое определяется по формуле(4) й =ХА,поступает в вычислительный блок 6.В вычислительном блоке 6 сигналы 6; поступают с блока 20 измеренных величин на умножитель4, а значение Й . с второго сумматора 15 на блок 19 сравнения вычислительного блока 6, где это значение (т. е. Ь) сравнивается с расчетным значением метацентрической высоты (6;), после чего результаты сравнения поступают на считывающее устройство 21 и устройство 22 вывода (например, телетайп) вычислительного 15 блока 6. Через блок 16 ввода данных расчетных величии штурман вводит данные о грузе (его вес и координаты), которые в блоке 1 памяти сравниваются с допустимыми значениями, после чего в блоке 18 исходных величин происходит вычисление по заданным20 координатам и массам груза значения Й формула азобретекаяСистема определения мета цен грической высоты судна, содержащая блок контроля судовых запасов, блок контроля посадки, блок контроля угла крена, выходы которых соединены с формирователем сигналов, который через интерфейс подсоединен к входу вычислительного блока, а также блок управления, который соединен с блоком накренения и через блок питания с другим входом вычислительного блока, отличаюцаяся тем, что, с целью повышения точности определения метацентрической высоты, система снабжена соединенными между собой запоминающим блоком, вход которого соединен с блоком контроля угла крена, квадратором, первым сумма гором, делителем, умножителем и вторым сумматором, выход которого соединен с входом вычислительного блока, другие входы умножителя соединены с выходами вычислительного блока, а другие входы делителя соединены с выходами квадратора.ре Корректор Подписное ственног 13035, М о.издател роизводстве Редактор А. ОгЗаказ 946ИИПИ Государ Составитель Ю. ЛазТехред И. ВерееТираж 360комитета по изобретениямсква, Ж - 35, Раушскаяский комбинат Патент, г и открытиям пнаб., д. 4/5Ужгород, ул. и ГКНТ СССРагарина, О
СмотретьЗаявка
4094043, 02.06.1986
ПРЕДПРИЯТИЕ ПЯ Г-4488
НАЙДЕНОВ ЕВГЕНИЙ ВАСИЛЬЕВИЧ, ЛИПИС ВИКТОР БОРИСОВИЧ, САЛОВ ВИКТОР ЕВГЕНЬЕВИЧ, ХАБУР ВЯЧЕСЛАВ БОРИСОВИЧ
МПК / Метки
МПК: B63B 39/00
Метки: высоты, метацентрической, судна
Опубликовано: 30.04.1990
Код ссылки
<a href="https://patents.su/4-1560449-sistema-opredeleniya-metacentricheskojj-vysoty-sudna.html" target="_blank" rel="follow" title="База патентов СССР">Система определения метацентрической высоты судна</a>
Стыковое соединение смежных блоков железобетонной балки

Номер патента: 360450
Опубликовано: 01.01.1972
Авторы: Иосилевский, Чирков
МПК: E04B 1/61
Метки: балки, блоков, железобетонной, смежных, соединение, стыковое
...этих стержней переменная и равна высоте блока 1 в зоне стыка, а диаметр стержней равен диаметру напрягаемых хомутов. После бетонирования временные стержни удаляют, в результате чего образуются каналы 3 для напряженных хомутов в блоке 1. После отпуска натяжения арматуры блок 1 вынимается из стенда.В т о р а я с т а д и я. Изготовление блоков 11. Чтобы достигнуть плотного прилегания по контакту блоков 1 и 11, блок 1 используется в качестве опалубки по поверхности косого стыка.Соприкасающуюся с блоком 11 поверхность блока 1 смазывают или в зону контакта вставляют тонкие упругие разделяющие прокладки. В образованные ранее каналы 3 блока 1 вставляются изолированные от сцепления с бетоном напрягаемые хомуты 2 длиной, равной полной высоте...
Вычислительный блок к устройствам для измерения геометрических размеров объектов

Номер патента: 765641
Опубликовано: 23.09.1980
Авторы: Костенко, Суздальцев
МПК: G01B 7/02
Метки: блок, вычислительный, геометрических, объектов, размеров, устройствам
...и на его первой выходной шине появляется сигнал, в результате чего происходит опрос первого конъ.онктора блока 5 конъюнкторов.Если фотодатчик ФД 1 ( на чертеже не показан) находится в сработанном состоянии (поверхность измеряемой фигуры не находится в зоне действия этого датчика), то срабатывает первый конъюнктор блока 5 конъюнкторов,и на выходе дизъюнктора появляется сигнал, который через инвертор 9 закрывает конъюнкторО.Второй импульс с распределителя 8 поступает по шине Г 1 на вход конъюнктора 10, но не проходит на вход счетчика 7.Третий импульс с распределителя 8 поступает по шине 1 на вход коммутатора 3, от чего с шины 1 снимается, а по шине 11 появляется сигнал, и все повторяется сначала.Если в зоне действия фотодатчиков (ФД - ФДп)...
Устройство для укладки скоб, соединенных в блоки

Номер патента: 1719266
Опубликовано: 15.03.1992
МПК: B65B 5/10
Метки: блоки, скоб, соединенных, укладки
...На кронштейне 18 стола 2 установлен механизм заполнения тары, состоящий из ходового винта 19 с гайкой 20, На нижнем конце ходового винта 19 уста, новлено свободно вращающееся зубчатоеколесо 21 с водилам 22 и жестко закрепленным храповым колесом 23, На водиле 22 зубчатого колеса 21 посредством оси 24 установлен храповик 25, Зубчатое колесо 21 связано со штоком-рейкой 26 силового цилиндра 27, Гайка 20 закреплена в кронштейне 28, имеющем откидывающуюся площадку 29 с фиксатором 30, На откидывающейся площадке 29 устанавливается ящичная тара 31 для блоков скоб 32,Устройство для укладки скоб работает следующим образом.Устройство для укладки скоб устанавливают рядом са станкам па изготовлению скоб таким образом, чтобы торец падающего...
Устройство для контроля программно-управляемого вычислительного блока

Номер патента: 1829034
Опубликовано: 23.07.1993
Автор: Берников
МПК: G06F 11/00
Метки: блока, вычислительного, программно-управляемого
...производится над вторым операндом, который записывается во второй 5 регистр по управляющему сигналу на третьем выходе блока управления б, При выполнении третьей команды, в первом машинном цикле вычислительный блок получает из памяти код операции, который одновременно поступает на входы блока управления б. Выработанный блоком управления б сигнал с первого выхода поступает на вход блока памяти 2, который вырабатывает контрольный результат операции, поступающий на первый вход схемы сравнения 3. Параллельно вычислительный блок 7 тоже обрабатывает операнды в соответствии с кодом полученной команды. Следующей командой результат обработки данных передается вычислительным блоком 7 через формирователь 1 кода по модулю К на Второй вход схемь...
Механизм для соединения пружинньх блоков мягкой мебели

Номер патента: 262338
Опубликовано: 01.01.1970
Авторы: Алексеенко, Бочаров, Гузев
МПК: A47C 23/053
Метки: блоков, мебели, механизм, мягкой, пружинньх, соединения
...снабженный с двух боковых продольных сторон двумя парами направляющих 2 и 3, на каждой из которых установлено по одной каретке 4 на четырех катках 5. 11 каждой карет. ке установлен электродвигатель 6; вал 7 которого фрикционно контактирует с приводным диском 8 сшивного механизма, Последний включает стойку 9 с валом 10, несущим с одного конца приводной диск 8. а с другого конца гибкий вал 11 с наконечником 12, захватывающим сшивающую цилиндрическую спиральную пружину 18. На корпусе каретки шарнирно укреплена подпружиненная ножная педаль 14 механизма включения, несущая на верхнем конце жестко закрепленную стойку 9 ситивного механизма, Для удерживания сшивной пружины 18 в удобном ири работе положении на каретке имеется стойка 15 с шарнирным...
Предыдущий патент: Витраж
Следующий патент: Обечайка для упаковки грузов
Случайный патент: Способ управления процессом переработки руд