Устройство для полунатурного моделирования робота
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1444833
Авторы: Мельнинкайте, Петарене, Скучас




Текст
ОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСКИРЕСПУБЛИН 51)4 О 06 С 7/4 ГОС ПО САНИЕ ОБРЕТЕНИ ТОРСНОМУ ЕЛЬСТ К инстиене МО 00 М М АРСТВЕННЫЙ НОМИТЕТ СССРЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИИ(56) Авторское свидетельство СССУ 822221, кл. С 06 С 7/66, 1984.Авторское свидетельство СССР9 1113817, кп. С Об О 7/48, 1985(54) УСТРОЙСТВО ДЛЯ ПОЛУНАТУРНОГДЕЛИРОВАНИЯ РОБОТА(57) Изобретение относится к системамавтоматизированного проектированиямашин и может быть применено для автоматизированного проектирования робтов модульного типа. Цель изобретения - расширение функциональных возможностей за счет моделирования поступательного и вращательного движенияробота. Цель достигается введениемв устройство управляемого электромагнитного тормоза, расположенного наопорном валу, дифференциального усилителя, индикатора, инвертора, блоковмоделирования вращательного и поступательного движений. 2 нл.Изобретение относится к системамавтоматизированного проектированиямашин и может быть применено для автоматизированного проектирования робо 5тов модульного типа.Цель изобретения в . расширение функциональных возможностей за счет моделирования поступательного и вращательного движения робота. 10На фиг. 1 изображена схема робота;на фиг. 2 - полунатурная модель роботаУстройство содержит блок 1 (фиг.2)моделирования вращающейся стойки Э 1 15(фнг. 1), состоящий иэ двигателя 2,соединенного через редуктор 3 с опорным валом 4 блока, и датчика 5 ускорения вращения вала, выход которогочерез последовательно соединенные интеграторы 6 и 7 подключен к входу двигателя 2, кроме того, устройство содержит управляемый электромагнитныйтормоз 8, надетый на вал 4 блока, кэлектромагнитам 9 которого поцключен 25выход датчика 10 момента через дифференциальный усилитель 11, к второмувходу которого подключен выход интегратора 7 через сумматор 12. На второй вход сумматора 12 подключен его 30же выход через последовательно соединенные интегросумматор 13 и интегратор 14, в свою очередь к второмувходу интегросумматора 13 подключенвыход источника 15 постоянного напряжения. Устройство содержит также индикатор 16, к первому входу которогоподключен выход интегратора 14 черезинвертор 17, а к второму входу - выход датчика 10 через последовательно 40соединенные блок 18 умножения и интеграторы 19 и 20, причем выход интегратора 19 соединен с вторым входомблока 18 умножения, а к второму входуинтегратора 19 подключен выход источника 21 постоянного напряжения. Сумматор 12, интегросумматор 13, интегратор 14, источник 15 постоянного напряжения образуют блок 22 моделированиявращательного движения звена Э 2. Блок18 умножения, интегросумматор 19, ин 50тегратор 20, источник 21 постоянногонапряжения образуют блок 23 моделирования поступательного движения звена Э 2,Устройство работает следующим образом.Колонна робота - вращательное звено Э 1 взнмодействует с поступательновращательным звеном Э 2, Колонна робота представляется реальной, а звеноЭ 2, включающее также схват и переме"щаемую деталь, - формализованной частью. Координата вращательного перемещения звена Э 2 относительно звена Э 1определяется решением уравнения вида+С( - ,)+1, =О, (1)где 1 - приведенный момент инерциизвена Э 2 относительно оси колонны Э 1 (фиг. 1),"М - момент нагрузки на звено Э 2;с, - угол поворота колонны:С - жесткость узла связи междузвеньями Э 1 и Э 2,Для решения уравнения 1) на входсумматора 12 подается сигнал, пропорциональный величине Чс выхода интегратора 14 через весовой коэффициенти сигнал с выхода интегратора 7, пропорциональный величине, также через весовой коэффициент С. На выходесумматора формируется сигнал С ( -Ч,)который поступает на первый вход инте"гросумматора 13 через весовой коэффициент 1/1, С помощью источника 15 постоянного напряжения на второй входинтегросумматора 13 подается сигнал,пропорциональный величине 1/1 М 1. Приэтом на его входе согласно уравнению( . Он поступает на вход интегратог"ра 14, а на его выходе образуется сигнал -Ц, чем осуществляется решениеуравнейия (1) .Сигнал, сформированный на выходесумматора 12, пропорционален моменту, действующему на реальную часть -колонну со стороны моделируемой части, т,е. звена Э 2. Он поступает навторой вход дифференциального усилителя 11, в котором сравнивается ссигналом, пропорциональным действительному моменту, действующему на колонну, и поступающим на первый входусилителя 11, этот сигнал измеряетсядатчиком 10 момента. Если сигнал напервом входе усилителя 11 меньше сигнала на втором входе, на выхоце усилителя 11 выдается сигнал, который припоступлении на электромагниты 9 тормоза 8 вызывает силу прижатия междуего элементами, что создает моментсопротивления вращению колонны. Онизмеряется с помощью датчика 10 момента, и величина сигнала на впервомвходе усилителя возрастает. Когда она14448 метров. достигает и даже превышает величинуна втором входе усилителя 11, сигнална выходе усилителя 11 уменьшается,Следовательно, уменьшается и момент,задаваемый тормозом 8. Таким образом,момент, задаваемый тормозом, являетсяпропорциональным сигналу на второмвходе усилителя 11, а также величинес (,-,),10Звено Э 2 также совершает поступательное движение, которое определяется решением уравнения видапах+к(и)х=к,и , (2)15где ш - масса звена Э 2, включая массу перемещаемой детали;К(И) - коэффициент трения как функцияот момента М, действующегомежду звеньями Э 1 и Э 2; 20М - момент двигателя обеспечи 4Увающего поступательное движение звену 32;К - коэффициент трансформации вращательного движения связи меж ду звеньями Э 1 и Э 2 в поступательное,Решение уравнения осуществляетсяследующим образом.На первый вход блока 18 умножения 30подается сигнал как функция моментаМ, который измеряется датчиком 10 изависит от конструктивных, кинематических и технологических параметров,а также точностных характеристик робоЗБта, На второй вход блока 18 умножениячерез весовой коэффициент 1/ш с выхода интегросумматора 19 подается сигнал - Х, и на выходе блока 18 умноже 1ния образуется сигнал К(М)1 Х ко-1 ш фторый поступает на второй вход интегросумматора 19, На его первом входес помощью источника 21 постоянногонапряжения через весовой коэффициент 451/ш формируется сигнал, пропорциональный (1/ш)М, и тем самым на входе формируется сигнал Х, а на выходе - сигнал -Х, который поступаетна вход интегратора 20. На его выходе получается сигнал Х, который поступает на первый вход индикатора 16,на второй вход которого поступает сигнал (р из интегратора 14. На его выходе образуется сигнал -, а на выходе инвертора 17 получаем сигнал цНа индикаторе 16 осуществляется визуальный контроль перемещения звена Э 2в плоскости координат С и Х. Так 33 4изменением коэффициентов на входахблоков 12,13, 18 и 21 изменяются динамические параметры моделируемой частиробота. Изменение параметров производят, наблюдаяповедение звена Э 2 наэкране индикатора 16, например, наблюдая точность позиционирования, времяперехода с одного значения в другоеи т.д. и определяя желаемое или оптимальное значение в заданной областивозможного изменения упомянутых параФормула и з о б р е т е н и яУстройство для полунатурного моделирования робота, содержащее блок мо" делирования вращающейся стойки, состоящий из первого и второго интеграторов, двигателя, вал которого кинематически связан с редуктором, выходной вал которого является опорным валом блока моделирования вращающейся стойки, датчика момента, датчика ускорения вращения вала, выход которого через последовательно соединенные первый и второй интеграторы подключен к входу двигателя блока моделирования вращающейся стойки, о т л и - ч а ю щ е е с я тем, что, с целью расширения функциональных возможностей за счет моделирования .поступательного и вращательного движения робота, оно содержит управляемый элект.ромагнитный тормоз, расположенный на опорном валу, дифференциальный усилитель, индикатор, инвертор, блок моделирования вращательного движения, содержащий пбследовательно соединенные источник постоянного напряжения, интегросумматор, интегратор и сумматор, другой вход сумматора соединен с выходом второго интегратора блока вращающейся стойки, а выход - с другим входом интегросумматора и первым входом дифференциального усилителя, второй вход которого подключен к выходу датчика момента блока вращающейся стойки, выход дифференциального усили- теля подключен к электромагнитам управляемого электромагнитного тормоза, выход интегратора блока моделирования вращательного движения соединен через инвертор с первым входом индикатора, блок моделирования поступательного движения, включающий последовательно соединенные блок умножения, интегросумматор, интегратор, а также подклю- ченный к второму входу интегросумма5 1444833 6 тора источник постоянного напряжения, сумматора блока моделирования посту- первый вход блока умножения соединен , пательного движения, выход интегратос выходом датчика момента блока вра- Ра блока моделирования поступательщающейся стойки, второй вход блока ного движения подключен к второму5умножения соединен с выходом интегро- входу индикатора. Фиа 8 Геча Составителарфенова Техред М,дид Редакто РРехтор, В.Романенк Пр Заказ 6509/ 1 Тираж 704 ВНИИПИ Государственногопо делам изобретений и 13035, Москва, Ж, Раушс исноСР митетаткрытийя наб. 4/5 Производственно-полиграфическое предприятие, г, ужгород, ул. Проектная
СмотретьЗаявка
4150923, 24.11.1986
КАУНАССКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. АНТАНАСА СНЕЧКУСА
МЕЛЬНИНКАЙТЕ ВИДА ЛЯОНОВНА, ПЕТАРЕНЕ ГРАЖИНА ПЕТРОВНА, СКУЧАС ИГНАС ЮОЗОВИЧ
МПК / Метки
МПК: G06G 7/48
Метки: моделирования, полунатурного, робота
Опубликовано: 15.12.1988
Код ссылки
<a href="https://patents.su/4-1444833-ustrojjstvo-dlya-polunaturnogo-modelirovaniya-robota.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для полунатурного моделирования робота</a>
Устройство для моделирования люфта в механической передаче

Номер патента: 1287198
Опубликовано: 30.01.1987
Авторы: Козлова, Кондратьев, Рааг, Стеблецов, Шестериков
МПК: G06G 7/25
Метки: люфта, механической, моделирования, передаче
...резисторов 25 и 26, пропорционального величине люфта, диоды 23 или 24 отпи" раются и напряжение через контакты 32, 31 или 33, 32 поступает на управляющий вход первого ключа 12, его контакты 28, 30 замыкаются, а контакты 27, 29 - размыкаются. В момент выбора люфта на выходах блоков 1 и б обнуляются сигналы ц, и цд, соответствующие расцепленному движению, а задающим напряжением для этих блоков 1 и 6 становится напряжение По, пропорциональное скорости начала совместного движения ведущих и ведомых частей после выбора люфта, получаемое на выходе блока 15 и поступающее через резистор 9 и замкнутый при этом контакт 28 на третий вход блока 1, через резистор 11 и замкнутый при этом контакт 30 на третий вход блока 6. Люфт выбран, скорость...
Устройство для моделирования нейронных структур двигательного аппарата

Номер патента: 1585809
Опубликовано: 15.08.1990
Автор: Романов
МПК: G06G 7/60
Метки: аппарата, двигательного, моделирования, нейронных, структур
...в своем составе сократимыеструктуры - интрафузальные мышечныеволокна, Свойства сухожильного органа Гольджи моделируются блоком 24, вкотором передаточными характеристи-,ками пропорционально-дифференцирующего звена 25 моделируются упруговязкие свойства капсулы сухожильногооргана, а на преобразователе 26 аналогового напряжения в импульсньпс поток воспроизводятся характеристикипреобразования рецепторного потенциала в распространяющиеся по аксонам афферентного нейрона импульсы,несущие в нервную систему информацию о напряжениях, возникающих в мьппцах, Свойства мынечного веретена мо-делируются блоком 27, в состав которого входят модель мьшщы 20,а свойства рецепторных образований вере- .тена моделируются пропорциональнодифференцирующими звеньями...
Устройство для моделирования петли гистерезиса
Номер патента: 710050
Опубликовано: 15.01.1980
Автор: Бусаров
МПК: G06G 7/25
Метки: гистерезиса, моделирования, петли
...входы функциональных преобра"зователей Э и 4, выходы которых через ключ 5, управляющий вход которого подсоединен к выходу блока 2 икоторый в зависимости от знака про-,изводной подключает ко второму входублока перемножения б выход либо Первого, либо второго функциональногопреобразователя. Первый вход блока бподсоединен к выходу блока 1, а выход через интегратор 7 ко вторым входам функциональных преобразователейи к выходу устройства. Выход блока 2подключается также ко входу дополнительного блока дифференцирования 8,вырабатывающего импульсы малой длительности в моменты смены знака хЯ),а выход блока 8 через счетчик импуль;сов 9 подсоединен к третьим входамфункциональных преобразователей и выходу устройства,Таким образом, на выходах...
Устройство для моделирования процессов наполнения и опорожнения тормозной магистрали железнодорожного подвижного состава

Номер патента: 1277151
Опубликовано: 15.12.1986
МПК: G06G 7/57
Метки: железнодорожного, магистрали, моделирования, наполнения, опорожнения, подвижного, процессов, состава, тормозной
...Я(Я) расход, идущий на наполнение (опорожнение)тормозной магистралижелезнодорожного подвижного состава 1 О я,(я),чг фф, (Я) - расходы, идущие на наполнение (опорожнение)тормозной магистралипервого, второгоК-го вагонов соответственно.Вход задания тормозной жидкостиустройства подключен к первому входусуммирующего усилителя 1 первого блока моделирования процессов наполнения и опорожнения тормозной магистрали вагона. Нарастание выходногосигнала системы на выходах интеграторов 5 происходит до тех пор, покана выходе операционных усилителей ЗО10 электрический сигнал не станетравным нулю. При отработке системойпроцесса наполнения тормозной магистрали железнодорожного подвижного состава электрический сигнал на выходахоперационных усилителей 10...
Устройство для моделирования процессов износа
Номер патента: 1288727
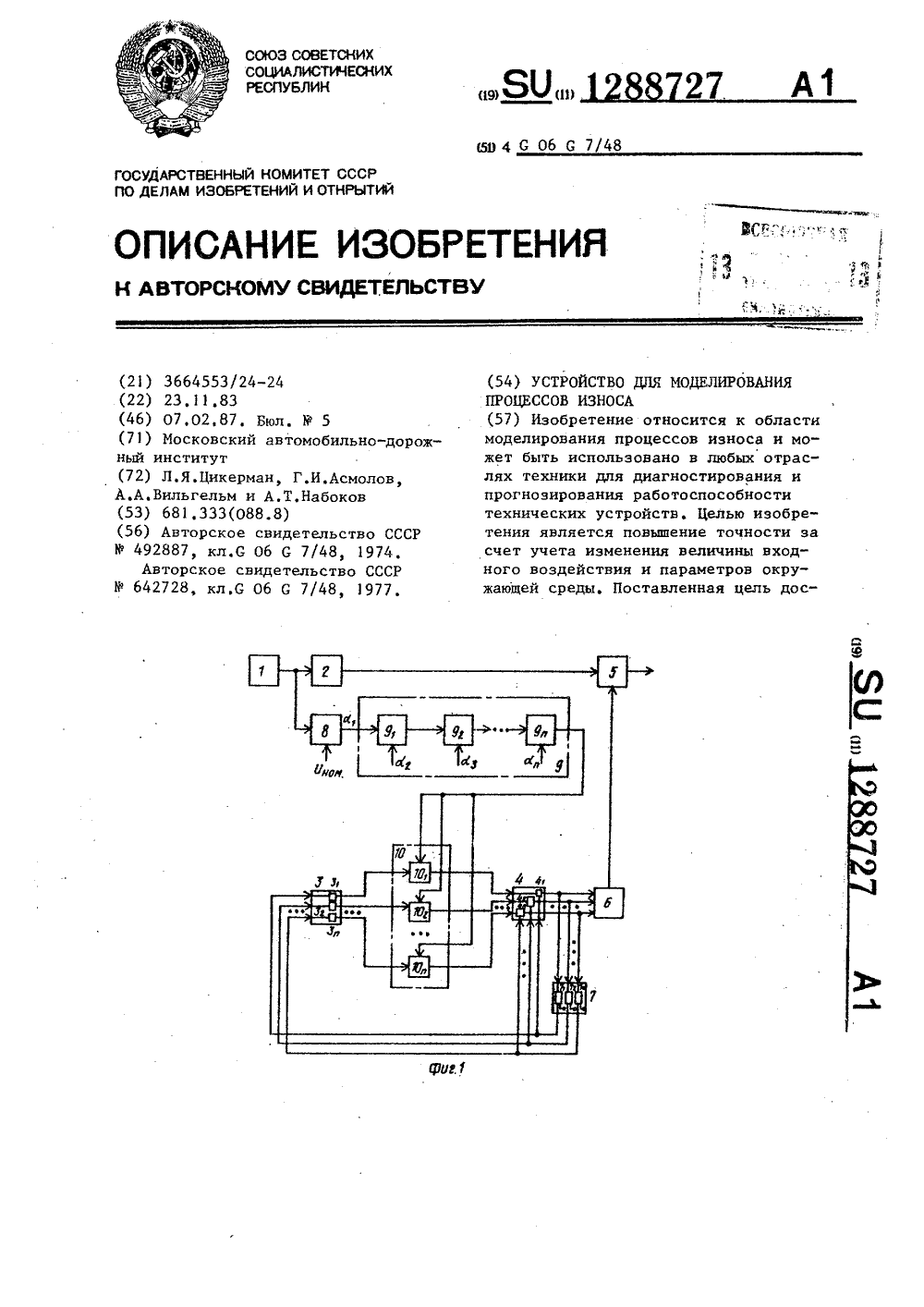
Опубликовано: 07.02.1987
Авторы: Асмолов, Вильгельм, Набоков, Цикерман
МПК: G06G 7/48
Метки: износа, моделирования, процессов
...при моделирова 1288727нии, Функциональные преобразователи 3 реализуют, например, параболическую функцию.Назначение этих блоков в предлагаемом устройстве состоит в воспроизведении (синхронно с работой модели объекта) интенсивности износов различного вида во времени, полученных при номинальных режимах и в нормальных условиях,На выходах функциональных преобразователей в аналоговой форме вырабатываются сигналы, поступающие навходы блоков перемножения блока 10,Сигналы с выхода последнего,отображающие реальные характеристикиизносов для различных условий окружающей среды, поступают на входыблоков 4 интеграторов, на выходе которых формируются напряжения, моделирующие процесс накопления износов вобъекте,3 Эти напряжения поступают одновременно...
Предыдущий патент: Аналого-цифровой интегратор
Следующий патент: Устройство для гальванической развязки аналоговых сигналов
Случайный патент: Способ изготовления водоэмульсионной ротаторной краски