Устройство для прогнозирования ресурса подшипников качения
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
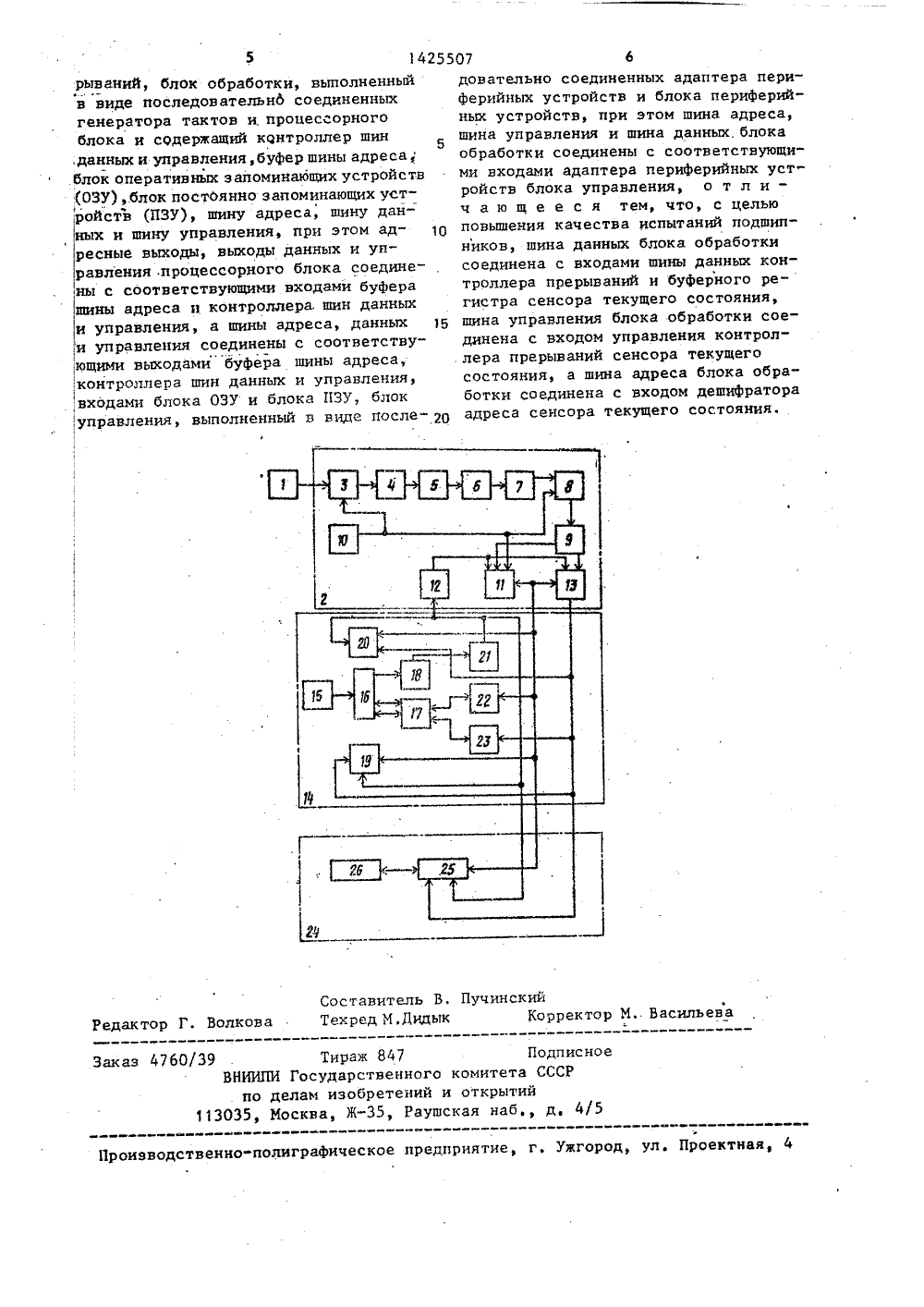
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕ(НИХРЕСПУБЛИК ОСУДАРСТВЕННЫЙ НОПО ДЕЛАМ ИЗОБРЕТЕНИ ЕТ СССРИ ОТКРЫТИЙ НИ о СССР 984чер ОПИСАНИЕ ИЗОБР й АВТОРСКОМУ СВИДЕТЕПЬСТ(71) Институт прикладной физикиАН БССР(54) УСТРОЙСТВО ДПЯ ПРОГНОЗИРОВАНИЯРЕСУРСА ПОДШИПНИКОВ КАЧЕНИЯ(57) Изобретение относится к подшип-никам и м,б. использовано при контроле состояния подшипников каченияв процессе эксплуатации. Цель - повьппение качества испытаний подшипников. Электрический сигнал с вибропреобразователя, закрепленного накорпусе контролируемого подшипникакачения, после усиления поступает всенсор текущего состояния, на .выходах которого вырабатываются коды на;пряжения, пропорциональные максимальной глубине и объему, повреждений,При этом на выходе счетчика формируЯ 014255 ется код напряжения (КН), пропорциональный объему повреждений на телах качения. Далее КН с выходов сенсора текущего состояния подается на соответствующие входы блока остаточного ресурса и прогнозирования наработки. Блок распределения текущего состояния производит регистрацию распределения информативных амплитуд по времени, за счет чего синтезируется образ разрушения контролируемого подшипника, заносимый в блок данных. При совпадении вырабатывается потенциал КН на входе мажоритарного блока. Информация с блока данных поступаетез мультиплексор на блок деления, а где формируются коды величины оста-. точного ресурса. С выходов мажоритарного блока, блока деления и блока регистрации прогнозируемого состоя- С ния и блока прогнозирования наработки КН поступают в схему согласова" ния, где происходит согласование их уровней с уровнями индикатора, кото, рый производит печать и индикацию остаточного ресурса и прогнозируемого времени наработки. 1 ил, . СЛЮиены с соответствующими входами.адаптера 25 периферийных устройствв составе блока 24 управления, шина21 адреса соединена с дешифратором12 адреса, шина 22 данных и шина 23управления соединены с заданными входами контроллера 13 прерываний, ашина 22 данных соединена с выходомданных буферного регистра 11 в составе сенсора 2 текущего состояния.Устройство работает следующим образом,Блок 24 периферийных устройстввырабатывает потенциалы управляющихнапряжений, которые с выходов блока ф26 периферийных устройств, напримердисплея через адаптер 25 периферийных устройств, шину 22 данных и шину23 управления поступают в блок 14обработки. Последний за счет наличияимпульсов напряжения генератора 15тактов, инициализирует процессорныйблок 1 б. Процессорный блок 16 пересылает при этом потенциалы управляющихнапряжений блока 24 управления в блокОЗУ 9 с помощью шины 21 адреса,шины 22 данных и шины 23 управления,а также буфера 18 шины адреса и контреллера 17 шин данных и управления,Блок ОЗУ 19 хранит заданные потенциалы управления.Далее электрический сигнал блока1 вибропреобразователей, закрепленного на корпусах испытываемых подшипников качения, поступает на вход сенсора 2 текущего состояния, где проходит через коммутатор 3, усиливаетсяв предусилителе 4, автонормируетсяпо величине среднего квадратическогоили абсолютного значения в блоке 5автонормирования, фильтруется до заданного среднего квадратического илиабсолютного значения высших частот вблоке 6 фильтра высших частот, усиливается по заданной зависимости в блокечастотной характеристики и поступает на вход пикового детектора 8.Пиковый детектор 8 регистрирует экстремум входного сигнала блока 1 вибро 11425507Изобретение относится к подшипниковой промьппленности и может быть .использовано при контроле состоянияподшипников качения в процессе эксплуатации.Цель изобретения - повьппение качества испытаний за счет расширениядиапазона измеряемых характеристикповреждений в подшипниках качения, 10На чертеже дана схема предлагаемого устройства.Устройство содержит блок 1 вибро: преобразователей и сенсор 2 текущегосостояния, выполненный в виде последовательно соединенных с выходом блока 1 вибропреобразователей, коммута"тора 3, предусилителя 4, блока 5 автономирования, блока 6 фильтра высших частот, блока 7 частотной характеристики, пикового, детектора 8 иАЩ 1 9.Сенсор 2 текущего состояния содержит генератор 10 тактовых импульсов и буферный регистр 11, при этом 25выход генератора 10 тактовых импульсов соединен с входом установки нуляпикового детектора 8, входом переключения коммутатора 3, входом запуска АЦП 9 и входом состояния генератора тактовых импульсов в буферномрегистре 11, дешифратор 12 адреса иконтроллер 13 прерываний, при этомвыход дешифратора 12 адреса соединенс адресным входом буферного регистра11 и входом адреса контроллера 13прерываний, выход готовности преобразования АЦП 9 соединен с входом запроса прерывания контроллера 13 пре"рываний.40Устройство содержит блок 14 обработки, выполненный в виде последовательно соединенных генератора 15тактов и процессорного блока 16,содержащий контроллер 17 шин данныхи управления, буфер 18 шины адреса,блок ОЗУ 1 9, блок ПЗУ 20, шину 21адреса, шину 22 данных, шину 23 управления, при этом адресные выходы,выходы данных и выходы управленияпроцессорного блока 16 соединены соответственно с входами буфера 18 шины адреса и контроллера 17 шин данных и управления, а шина 21 адреса,шина 22 данных и шина 23 управлениясоединены соответственно с выходомбуфера 18 шины адреса, выходами кон-,троллера 17 шин данных и управления,а также адресными, управления и информационными входами блока ОЗУ 19 и блока ПЗУ 20.Устройство содержит блок 24 управления, выполненный в виде последовательно соединенных адаптера 25 периферийных устройств и блока 26 периферийных устройств, при этом шина 21 адреса, шина 22 данных и шина 23 управления блока 14 обработки соеди1 О 15 20 30 3540 45 50 55 314преоб раз овател ей, п ропорцион аль ныйвеличине ударного взаимодействия телкачения о дефекты (повреждения) вконтролируемом подшипнике и соответственно пропорциональный глубине повреждений (дефектов).Далее АЦП 9 преобразует выходноенапряжение пикового детектора 8 вкод напряжений, который подается назаданный вход буферного регистра 1.Генератор 1 0 тактовых импульсовсинхронизирует работу коммутатора 3,пикового детектора 8, АЦП 9 и вырабатывает код напряжений о состояниикоммутатора 3, который подается навход состояния генератора 10 тактовыхимпульсов в буферном регистре 11.Одновременно с выхода готовностипреобразования АЦП 9 потенциал напряжения поступает на вход запроса пре"рывания контроллера 13 прерываний.Последний через шину 23. управленияи шину 22 данных сообщает блоку 34обработки о готовности данных АЦП 9.При этом в блоке 14 обработки за счетпотенциалов генератора 15 тактов,инициализируется процессорный блок16, контроллер 17 шин дайных и управления, буфер 18 шины адреса, блок19 ОЗУ, шина 21 адреса, шина 22 данных и шина 23 управления, за счетчего через дешифратор 12 адреса поступают потенциалы напряжений на ад ресные входы буферного регистра 11у контроллера 13 прерываний, последний отключается от шины 22 данных,и потенциалы напряжений с выхода бу-,Ферного регистра 11 переносятся вблок ОЗУ 19. Таким образом, блок 14обработки воспринимает информацию ввиде кодов напряжений о текущем состоянии контролируемого подшипника.Далее процессорный блок 16 засчет импульсов генератора 15 тактовинициализирует контроллер 17 шинданных и управления буфер 18 шиныадреса и через шину 21 адреса и шину 23 управления - блок ОЗУ 9 иблок ПЗУ 20. При этом занесенные ранее в блок ПЗУ 20 коды напряженийсравниваются процессорным блоком 6с кодами напряжений о состоянии контролируемого подшипника, записанными в блоке ОЗУ 19. При совпадениизаданного числа кодов с заданнойошибкой в блоке ОЗУ 1 9 и записанныхкодов о состоянии подшипников, ранее контролируемых в блоке ПЗУ 20,25507 4 процессорный блок 6 пересылает коды напряжений о соответствующем типе деФектов и остаточном ресурсе из блока ПЗУ 20 в блок 26 периферийных уст" ройств (например, принтер) за счет импульсов напряжений, передаваемых процессорным блоком 16 через буфер 18 шинь: адреса, контроллер 17 шин данных и управления, шину 21 адреса, шину 22 данных, шину 23 управления и адаптер 25 периферийных устройств в составе блоха 24 управленияТаким образом, сравнивается ранее полученная информация о характере изменения контролируемого параметра вибрации испытываемых подшипников, установленном ранее виде дефекта, например обраэиэном износе, усталостном выкрашивании ипи недостаточности смазки, а также соответствующем ресурсе., с вновь поступающей информацией о регистрируемом параметре вибрации, на основе чего предлагае мое устройство вырабатывает. данные об ожидаемом виде дефекта и ресурсе контролируемого подшипника качения.Предлагаемое устройство позволяет повысить качество испытаний подшипников. формула изобретения Устройство для прогнозирования ресурса подшипников качения, содержащее последовательно соединенные блэк вибропреобразователей и сенсор текущего состояния, выполнечный в вице последовательно соединенных с выходом блока вибропреобраэователей коммутатора, предусилителя, блока автонормирования, блока фильтра высших частот, блока частотной характеристики, пикового детектора и аналого-цифрового преобразования ,АЦП) и содержащий буферный регистр, генератор тактовых импульсов, выходом сое" диненнь;й с входом установки нуля пи" кового детектора, входом переключения коммутатора, входом запуска АЦП и входом состояния генератора тактовых импульсов в буферном регистре, дешифратор адреса и контроллер прерываний, при этом выход дешифратора адреса соедичен с адресным входом буферного регистра и входом адреса контроллера прерываний, выход готовности преобразователя АЦП соединен с входом запроса прерывания контроллера пре07 Составитель В. ПучинскийГ. Волкова Техред М.Дидык Корректор М Васильева Редак Подпискомитета СССРи открытийская наб д, 4 аказ 4760/39 Тираж ВНИИПИ Государс по делам изоб 113035, Иосква, Ж е венног етений 5, Рау е предприятие, г. Ужгород, ул. Проектная 1 роизводственно-полиграфиче 5 14255 рываний, блок обработки, выполненный в виде последовательно соединенных генератора тактов и процессорного блока и содержащий контроллер шин ,данных и управления, буфер шины адреса, блок оперативных з апоминающих устройств (ОЗУ),.блок постоянно запоминающих уст,ройств (ПЗУ), шину адреса, шину данных и шину управления, при этом ад ресные выходы, выходы данных и управления процессорного блока соедине,ны с соответствующими входами буфера шины адреса и контроллера шин данных и управления, а шины адреса, данных 15 ,и управления соединены с соответствующими выходами буфера шины адреса, :контроллера шин данных и управления, входами блока ОЗУ и блока ПЗУ, блок управления, выполненный в виде после О довательно соединенных адаптера периФерийных устройств и блока периферийных устройств, при этом шина адреса,шина управления и шина данных блокаобработки соединены с соответствующими входами адаптера периферийных устройств блока управления, о т л и -ч а ю щ е е с я тем, что, с цельюповышения качества испытаний подшипников, шина данных блока обработкисоединена с входами шины данных контроллера прерываний н буферного регистра сенсора текущего состояния,шина управления блока обработки соединена с входом управления контроллера прерываний сенсора текущегосостояния, а шина адреса блока обработки соединена с входом дешифратораадреса сенсора текущего состояния.
СмотретьЗаявка
4190783, 02.02.1987
ИНСТИТУТ ПРИКЛАДНОЙ ФИЗИКИ АН БССР
ЗАХАРОВ СЕРГЕЙ ИВАНОВИЧ, ЗАЦЕПИН НИКОЛАЙ НИКОЛАЕВИЧ, ШАПОРОВ БОРИС ДМИТРИЕВИЧ, ЧИГВИНЦЕВ ОЛЕГ РЮРИКОВИЧ
МПК / Метки
МПК: G01M 13/04
Метки: качения, подшипников, прогнозирования, ресурса
Опубликовано: 23.09.1988
Код ссылки
<a href="https://patents.su/4-1425507-ustrojjstvo-dlya-prognozirovaniya-resursa-podshipnikov-kacheniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для прогнозирования ресурса подшипников качения</a>
Устройство для выборки адресов из блоков памяти

Номер патента: 744722
Опубликовано: 30.06.1980
МПК: G11C 8/00
Метки: адресов, блоков, выборки, памяти
...адресные шины 18 и 9 каждого адресного формирователя 1 за пределами цикла памяти заряжены до уровня1 п -о МОП.транзисторами 5 и 8, где и - напряжение питания стока, 0 о - пороговое на прякенйе МОП.транзисторов обогащенного типа. Первым сигналом временной диаграммы фиг. 2) является сигнал предварительного заряда по первой тактовой шине 12, имеющей форму импульса с амплитудой .)с. На входных адресных шинах 20 в начале предварительного заряда и в течение всего времени предварительного заряда должен бытьустановившийся, адрес. По сигналу 12 по первой тактовой шине уровень сигнала 13 по второй тактовой шине понижается до уровня земли О и выходные адресные шины 18 н 19 отключаются от шины питания Ца МОП-транзисторы 6 н 9 вводятся в...
Устройство для сопряжения блоков обработки данных

Номер патента: 993235
Опубликовано: 30.01.1983
Авторы: Антимиров, Панова, Шаповалов
МПК: G06F 3/04
Метки: блоков, данных, сопряжения
...При которого объединен с первьм входомэтом второй блок обработки имеет досэлемента И б и подключен к прямому туп к блоку памяти в каждом цикле.1 Ф Ф выходу триггера 8, Этот выход являет- Выход элемента б (сигнал Ост,2 . ) ся первым выходом блока управления. имеет нулевое значение и не влияет Инверсный выход триггера 8 является на работу формирователя, 3, вырабатывторым выходом блока, а первый вход вающего серию синхроимпульсов для этого триггера подключен к первому второго блока обработки. Время задер" триггеру, его выходу. Первый вход 10 жки сигнала обращения фОбр, 2 опретриггера 7 является первым входом об- . деляется временами задержки одного ращения блока 1 и устройства в целом, элемента И и одного элемента ИЛИ. второй вход...
Устройство для подключения оконечных блоков передачи данных

Номер патента: 647882
Опубликовано: 15.02.1979
Авторы: Егоркина, Муравицкий, Новичков
МПК: H04L 25/40
Метки: блоков, данных, оконечных, передачи, подключения
...от приемопередатчика 1 блок выбора режима 4 выдает разрешающий сигнал на входной блок дешифрации 8, на информационные входы которого и поступает адрес вызываемого оконечного блока 3.Входиой блок дешифрации 8 дешифрирует адрес и выдает сигнал на блок разрешения связи 9, который разрешает ретрансляцию сигналов между приемопередатчиком 1 и оконечным блоком 3 через блок коммутации 10.В случае отсутствия сигналов запроса от приемопередатчика; 1 на входах блока выбора режима 4,устройство работает в режиме циклического опроса.В этом режиме сигнал с выхода блока выбора режима 4 разрешает работу счетчика 5, который вместе с дешифратором 6 образует распределитель.сигналы с выхода дешифратора б 48 поступают в блок разрешения связи 9, на который...
Устройство для синхронизации группы блоков обработки данных

Номер патента: 660043
Опубликовано: 30.04.1979
МПК: G06F 1/04
Метки: блоков, группы, данных, синхронизации
...элемент ИЛИ для положительного сигнала.Устройство работает следующим образом.Допустим, что единичный уровень сигнала появился первым на выходе формирователя временных интервалов одного из устройств 11, на выходах формирователей остальных устройств 11 присутствует нулевойуровень, В этом случае на входе сумматора 7 по модулю два, подключенном к линии, присутствует уровень логическойединицы, а на входе, подключенном к выходу формирователя временных интервалов, присутствует уровень логического нуля. На выходе сумматора по модулю двапоявляется уровень логической единицы,который устанавливает триггер в единичное состояние, Сигнал с выхода триггера6 устанавливает формирователь временныхинтервалов в нулевое состояние. Согласуюгций блок 3...
Устройство для синхронизациигруппы блоков обработки данных

Номер патента: 830358
Опубликовано: 15.05.1981
МПК: G06F 1/04
Метки: блоков, данных, синхронизациигруппы
...данных, к каждому из которых подключено соответствующее устройство для синхронизации группыблоков обработки данных. При включеяии питания генератор 1 каждогоблока обработки данных начинаетгенерировать импульсную последова"тельность, Формирователь 2 временных интервалов Формирует импульсную последовательность с необходимыми временными сигналами. Согласующий блок 3 согласует уровни сигналоэна выходе формирователя 2 временныхинтервалов и в линии 7 связи. Согласующий блок 3 также передает информацию с выхода формирователя 2 вре-55менных интервалов в линию 7 связи.Согласующие блоки 3 всех блоков 8 обработки данных образуют в совокупности элемент ПРОВОДНОЕ ИЛИ,Устройство работает следующим 60образом,При включении питания какой-,тоиэ...
Предыдущий патент: Способ контроля центрировки оптических систем и устройство для его осуществления
Следующий патент: Способ определения надежности деталей конструкции после ее ремонта
Случайный патент: Способ испытания торфа