Самонастраивающаяся система
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
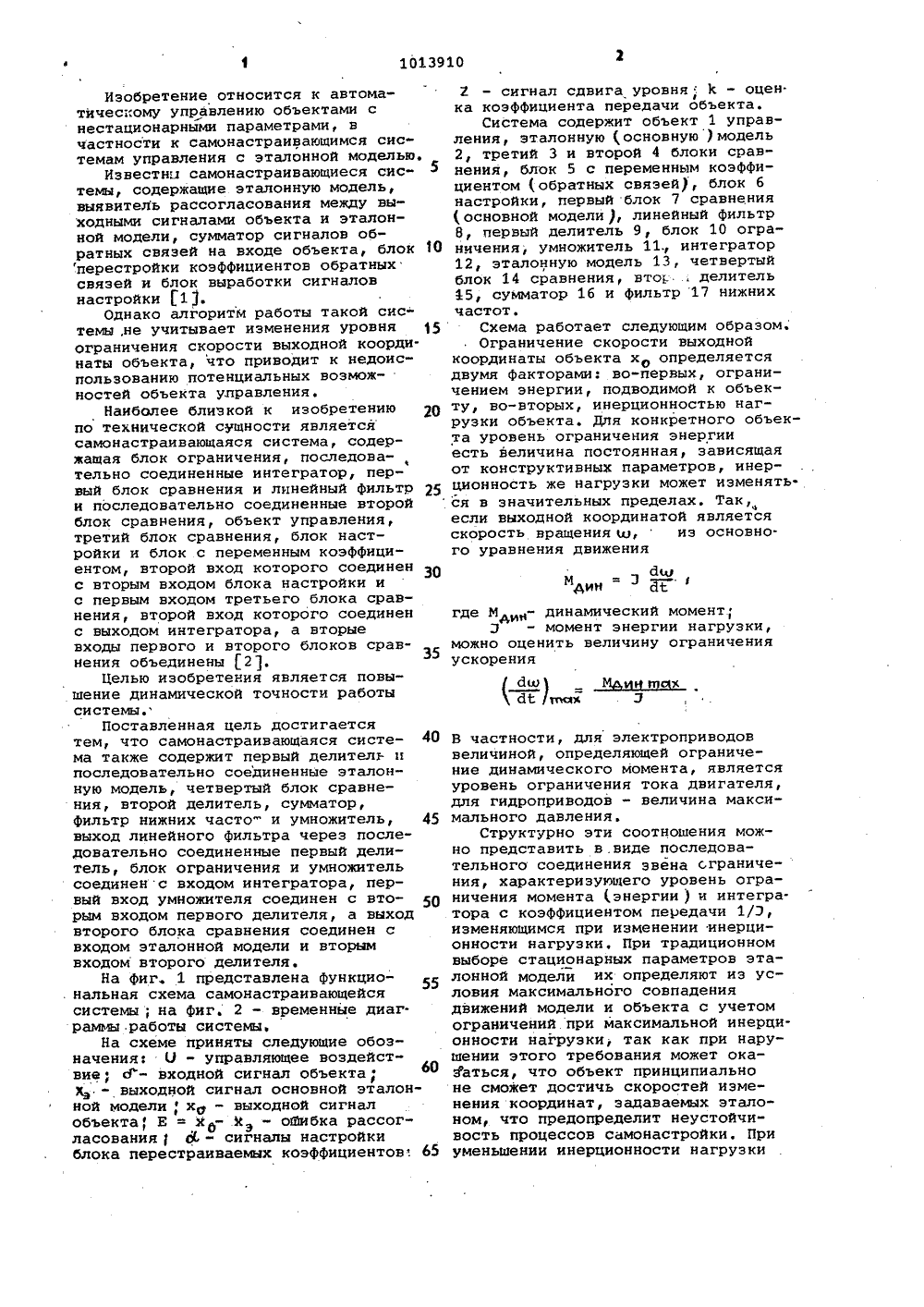
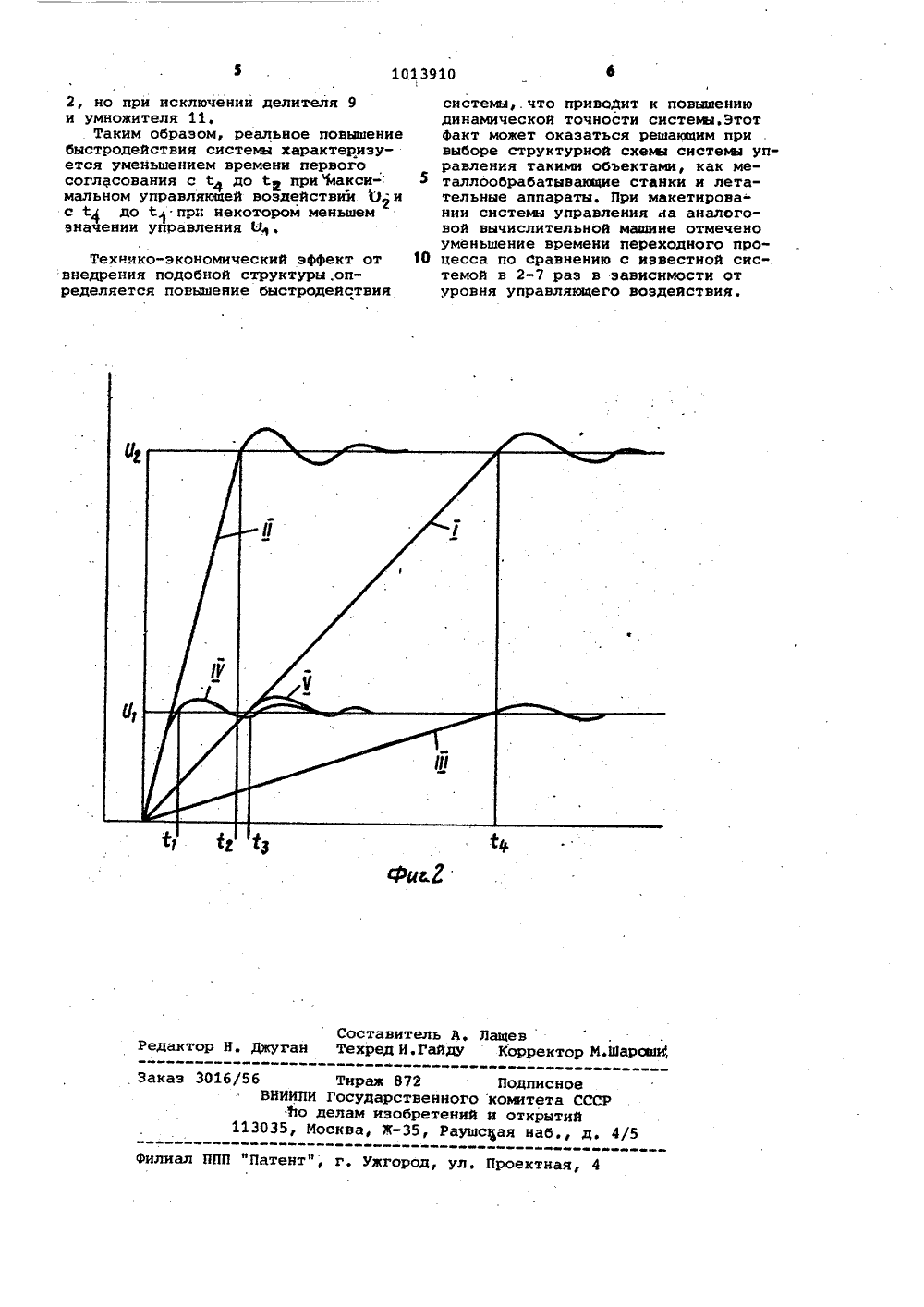
(22) 25.02; 8146) 23.04,83, Вюл. М 1572) Н.Г,Вутырин и А.Н.Щербина71) Ленинградский ордена .Ленинаполитехнический институтб 3) 62-50 (0888 )156) 1. Петров Б,Н. и др,Принципыпостроения и проектирования самонастраивающихся систем управления. . М., фМашиностроение", 1972, с. 184.(прототип ).54) (57) САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА, содержащая блок, ограничения,последовательно соединенные интегратор,первый, блок сравнения .и линейный ,: фильтр и последовательно соединенныевторой блок сравнейия, объект управления, третий блок сравнения, блокнастройки и блок с переменным коэфГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЬПИЙ фициентом, второй вход которого соединен с вторым входбм блока наст- . ройки и с первым входом третьего блока сравнения, второй вход которого соединен с выходом интегратора,а вторые входы первого и второго блоков сравнения объединены, о тл и ч а ю щ а я с я. тем, что, с целью повышения динамической точ-. ности системы, она содержит первый делитель.и последовательно. соединенные эталонную модельчетвертый блок сравнения, второй делитель, сумма-: тор, фильтр нижних частот и умножитель, выход линейного фильтра через последовательно соединенные первый делитель, блок ограничения и уме ф ножитель соединен с входом интегратора, первый вход умножителя.соедио нен с вторым входом первого дели" теля, а выход второго блока сравнения соединен с входом эталонной модели и вторым входом .второго де- Я лителя,Изобретение относится к автоматическому управлению объектами снестационарными параметрами, вчастности к самонастраивающимся системам управления с эталонной моделью.Известны самонастраивающиеся сис"темы, содержащие эталонную модель,выявитель рассогласования между выходными сигналами объекта и эталонной модели, сумматор сигналов обратных связей на входе объекта, блок 10перестройки коэффициентов обратныхсвязей и блок выработки сигналовнастройки 1 ).Однако алгоритм работы такой системы,не учитывает изменения уровня 15ограничения скорости выходной координаты объекта, что приводит к недоиспользованию потенциальных возможностей объекта управления,Наиболее близкой к изобретению 20по технической сущности являетсясамонастраивающаяся система, содержащая блок ограничения, последовательно соединенные интегратор, первый блок сравнения и линейный фильтр 25и последовательно соединенные второйблок сравнения, объект управления,третий блок сравнения, блок настройки и блок с переменным коэффициентом, второй вход которого соединенс вторым входом блока настройки ис первым входом третьего блока сравнения, второй вход которого соединенс выходом интегратора, а вторыевходы первого и второго блоков сравнения объединены 2 ,Целью изобретения является повышение динамической точности работысистемы.Поставленная цель достигаетсятем, что самонастраивающаяся система также содержит первый делитель ипоследовательно соединенные эталонную модель, четвертый блок сравнения, второй делитель, сумматор,фильтр нижних часто" и умножитель, 45выход линейного фильтра через последовательно соединенные первый делитель, блок ограничения и умножительсоединен с входом интегратора, первый вход умножителя соединен с вторым входом первого делителя, а выходвторого блока сравнения соединен свходом эталонной модели и вторымвходом второго делителя.На фиг. 1 представлена Функциональная схема самонастраивающейсясистемы; на фиг. 2 - временные диаграммы работы системы,На схеме приняты следующие обозначения: О - управляющее воздействие; д- входной сигнал объектаХ - выходной сигнал основной эталонной модели, х - выходной сигналобъектаф Е = х- хэ - ойибка рассогласованияд - сигналы настройкиблока перестраиваемых коэффициентов. 65 Е - сигнал сдвига уровня; Е - оцен ка коэффициента передачи объекта.Система содержит объект 1 управления, эталонную основную )модель 2, третий 3 и второй 4 блоки сравнения, блок 5 с переменным коэффициентом (обратных связей), блок 6 настройки, первый блок 7 сравнения 1,основной модели , линейный фильтр 8, первый делитель 9, блок 10 огранччения; умножитель 11 интегратор 12, эталонную модель 13, четвертый блок 14 сравнения, втоь .; делитель 5, сумматор 16 и фильтр 17 нижних частот.Схема работает следующим образом.Ограничение скорости выходной координаты объекта хо определяется двумя факторами: во-йервых, ограничением энергии, подводимой к объекту, во-вторых, инерционностью нагрузки объекта, Для конкретного объекта уровень ограничения энергии есть величина постоянная, зависящая от конструктивных параметров, инерционность же нагрузки может изменяться в значительных пределах, Так, если выходной координатой является скорость вращения о, из основного уравнения движения где М и - динамический момент.;Э - момент энергии нагрузки, можно оценить величину ограничения ускорения В частности, для электроприводов величиной, определяющей ограничение динамического момента, является уровень ограничения тока двигателя, для гидроприводов - величина максимального давления.Структурно эти соотношения можно представить в.виде последовательного соединения звена ограничения, характеризующего уровень ограничения момента энергии ) и интегра. тора с коэффициентом передачи 1/Э, изменяющимся при изменении инерционности нагрузки, При традиционном выборе стационарных параметров эталонной модели их определяют из условия максимального совпадения движений модели и объекта с учетом ограничений.при максимальной инерционности нагрузки, так как при нарушении этого требования может оказаться, что объект принципиально не сможет достичь скоростей изменения координат, задаваемых эталоном, что предопределит неустойчивость процессов самонастройки. При уменьшении инерционности нагрузкиО 15 20 25 30 35 40 50 55 60.65 объект .потенциально будет способенразвивать большие скорости, однакопри жестких параметрах модели и нормальной работе контуров самонастройки он будетвынужден следовать заэталоном,Для приведения в соответствиеуставок эталонной модели и потенциальных возможностей объекта, меняющихся сизменением нагрузки, используется измерение степени инерционности нагрузки и перестройкапараметров модели. Для оценки инерционности объекта, мерой которогоявляется коэффициент передачи объекта управления, используется схема,состоящая из элементов 13-17, Везучета переходных процессов выходной сигнал фильтра нижних частот17 фНЧ) в соответствии со схемойопределится какдЪ -д"1 с" "Фц аъАгде 1- оператор Фильтра нижних частот 17;К - коэффициент передачи0объекта 1,К - коэффициейт передачиЭэталонной модели 13;К - масштабный коэффициентделителя 15.Выбирая сигнал сдвига уровня величиной Кполучаем К =,Ат,е. выходной сигнал ФНЧ 17Кд 1Аявляется некоторой оценкой коэффициента передачи объекта.Выбором параметров эталонноймодели 13 максимально соответствующими расчетнымноминальным ) параметрам объекта гарантируется несмещенность этой оценки не только вустановившихся, но и в переходныхрежимах с точностью до погрешностисоответствия параметров объекта 1 имодели 13, Наличие этой погрешностиприводит к появлению некоторой ошибки в оценке коэффициента в переходных режимах, что требует включенияв схему фильтра нижних частот 17.Схема основной эталонной модели2 содержит блок 10 ограничения иумножитель 11. Уровень ограниченияблока 10 выбирается равным уровнюограничения объекта. При подаче на:вход умножителя 11 сигнала оценкикоэффициент передачи соединенияумиожитель 11 - интегратор 12 изменяется таким же образом, как икоэффициент передачи интегратора вструктурном представлении объектауправления.Таким образом, динамические характеристики эталонной модели 2 приводятся в соответствие с изменяющимися возможностями объекта 1 управления, что гарантируется совпадением ограничений скорости изменениявыходных координат эталонной модели2 и объекта 1 при изменении инерционности нагрузки объекта. Однако приосуществлении с этой целью изменения коэффициента передачи умножителя 11 изменяется контурньй коэффициент передачи эталонной модели какзамкнутой динамической системы, чтоприводит к изменению уставок показателей качества эталонной моделй,что особенно"скажется при работеэталонной модели и объекта ) в линейном режиме. С целью сохранениядинамических параметров линейногорежима в схему эталонной модели 2введен первый блок деления 9, навход делителя которого подан тотже сигнал, что и на управляющий входумножителя 11, В этом случае контурный коэффициент передачи эталонноймодели 2 не будет зависеть от величины сигнала К при работе модели влинейном режиме, что следует изочевидного соотношения К 9.- К 9 К,г где К К - коэффициенты передачи делителя 9 и умножителя 11;К 9 К 1- соответственно их масш"табные коэффициенты,Параметры линейного фильтра 8 вы бираются обычным образом при предложении линейности объекта управления и эталонной модели. На Фиг. 2 приведены временные диаграммы работы системы в виде реакции на ступенчатое изменение управ" ляющего сигнала и двух различных уровней.Индексом 1 обозначена реакция системы при номинальных параметрах и максимальной инерционности нагрузки. При стационарных параметрах модйли такая реакция будет обеспечиваться и при минимальной инерционности нагрузки, хотя объект может обес. печить реакцию вида И вследствие по-, вышения уровня ограничения скорости. При стационарных параметрах модели реакция на меньшее входное воздействие будет иметь вид кривой И, что свидетельствует о явном недоиспользовании возможностей объекта, При работе звеньев оценки К объекта и перестройке ее параметров в соответствии с схемой фиг. 1) реакция системы при минимальной инерционности нагрузки будет иметь вид кривой Й при реакции на управление 02 и вид кривой 12 при реакции на управление О, Кривая М характеризует реакцию системы при наличии ограничения в схеме эталонной модели32, но при исключении делителя 9 и умножителя 11,Таким образом, реальное повышение быстродействия системы характеризуется уменьшением времени первого согласования с й, до В при макси мальном управляющей воздействии О и с Й до й, при некотором меньшем значении управления 0. 10139 Технико-экономический эффект от 1 О внедрения подобной структуры,определяется повышение быстродействия 10 е системы,.что приводит к повышениюдинамической точности система. Этотфакт может оказаться решающим привыборе структурной схемы системы управления такими объектами, как металлообрабатываацие станки и летательные аппараты. При макетировании системы управления на аналоговой вычислительной машине отмеченоуменьшение времени переходного процесса по сравнению с известной системой в 2-7 раз в зависимости отуровня управляющего воздействия.Составитель АТехред И. Гайду врректор М.Ш га ВНИИПИ Йо д 113035, Моюжгород, ул. Проектна Редактор Н. ДжуЗаказ 3016/56 илиал ППП Патент",Тиражосударлам изква, Ж 4 Ю и МЮ ЕЕ аю Ю ЕНЕ Ю Е Е ю ю 2 Подписно венного комитета ретений и открыти 5, Раушская наб.,5
СмотретьЗаявка
3251711, 25.02.1981
ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. М. И. КАЛИНИНА
БУТЫРИН НИКОЛАЙ ГРИГОРЬЕВИЧ, ЩЕРБИНА АЛЕКСАНДР НИКОЛАЕВИЧ
МПК / Метки
МПК: G05B 13/04
Метки: самонастраивающаяся
Опубликовано: 23.04.1983
Код ссылки
<a href="https://patents.su/4-1013910-samonastraivayushhayasya-sistema.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система</a>
Система управления для объектовс запаздыванием

Номер патента: 840799
Опубликовано: 23.06.1981
Авторы: Жиляков, Садовой, Синепольский, Ульшин
МПК: G05B 13/02
Метки: запаздыванием, объектовс
...регулятор 2, сумматор 3, объект 4 регулирования, ныхоц которого подключен на вход первого блока 5 сравнения, кроме того, система снабжена первой моделью 6 объекта и элементом7 запаздывания, соединенными последовательно и подключенными ко входу объекта 4 и первого блока 5 сравнения, второй моделью 8 объекта, выход которой подключен ко входу объекта 3, а выход - ко входу второго блока 1 сравнения, выход первого блока 5 сравнения подключен ко входу вто рого блока 1 сравнения и блока 9 оптимизации, ко второму входу блока 9 оптимизации подключен выход второго блока 1 сравнения, а выход его с присоединен ко входу регулятора 2. 20Система работает следующим образом.При изменении сигнала Г и (или) Хпд появляется сигнал рассогласова.ния Х,...
Устройство для распознавания дефектов изображений объектов

Номер патента: 1718251
Опубликовано: 07.03.1992
Авторы: Масленников, Мельник, Одарюк, Смазнов, Чернявский
МПК: G06K 9/46
Метки: дефектов, изображений, объектов, распознавания
...(1), стробирует запись в буферы границ зон координат Х 1 и Хг по каждой строке.На следующей строке эти буферы выдаютсигналы, соответствующие участкам контроля по уровню "белого" и "черного" внутристроки,Эти сигналы, поступающие из блоков 4и 5 формирования границ зон в блок 2 задания режима распознавания, стробируютсравнение видеосигнала с соответствующим уровнем внутри каждой строки. Приналичии аномалий уровня видеосигнала впределах зоны контроля блок 2 задания режима распознавания фиксирует координаты выявленного брака изображения.В режиме формирования эталонов покоманде блока 1 управления блок заданиярежима распознавания синхронизируетсясигналами КСИ ИССИ телевизионного датчика 7 и выдает импульсы квантования строки...
Состав для обсыпки блоков моделей с керамическим покрытием

Номер патента: 1196095
Опубликовано: 07.12.1985
Авторы: Бушуев, Бушуева, Тимофеев
МПК: B22C 1/00
Метки: блоков, керамическим, моделей, обсыпки, покрытием, состав
...окисляет остатки модельного состава, находящегося в порах формы. При этом температуру обжига снижают до 560 С, а время обжигаопри этой температуре сокращают до 1,5 ч.При заливке форм жидким металлом в разогревшейся форме при температуре свыше 700 С происходит соединение пероксида бария с кислородом окружающей среды. Происходящая реакция способствует уменьшению в отливках толщины обезуглероженного слоя. Температуру обжига 560 С вы-Таблица 1 Ингре- диенты Содержание ингредиентов, мас, , в составе 1 12 3 Кварце 35песок 85 87 90 Пероксидбария 15 13 10 96095 2бирают в связи с тем, что при более .высокой температуре (570 С) в кварцевых материалах происходят объемно-фазовые превращения, в результатекоторых в форме возникают...
Гидравлическая система управления гидромеханической передачей трансмиссии транспортного средства

Номер патента: 1736771
Опубликовано: 30.05.1992
Авторы: Вовк, Геращенко, Куприянчик
МПК: B60K 41/16
Метки: гидравлическая, гидромеханической, передачей, средства, трансмиссии, транспортного
...соединен с полостью муфты блокировки гидротрансформатора, причем выход последнего соединен через регулятор давления с масляным баком, череЗ дроссель -с второй управляющей полостью клапана блокировки, датчиком скорости, выход которого соединен с обмоткой соленоида клапана блокировки гидротрансформатора, усилитель, выход которого соединен с обмоткой соленоида клапана разблокировки, снабжена микропроцессором, аналого-цифровым и цифроаналоговым преобразователями, оперативным и постоянным запоминающими устройствами, генератором тактовой частоты, таймером, интерфейсом, один из входов которого через аналого-цифровой преобразователь соединен с датчиком скорости, второй вход через цифроаналоговый преобразователь соединен с входом усилителя,...
Гидравлическая система управления гидромеханической передачей

Номер патента: 880805
Опубликовано: 15.11.1981
Авторы: Винарский, Казюк, Королев
МПК: B60K 41/16
Метки: гидравлическая, гидромеханической, передачей
...б включения муфты блокировкигидротрансформатора 7 соединен совходом и выходом из гидротрансформатора линиями управления, причемвыход из гидротрансформатора подается в полость пружины клапана управления,Гидравлическая система управления гидромеханической передачейработает следующим образом.По всасывающему трубопроводу избака 1 жидкость забирается гидронасосом 2 и по нагнетательному трубопроводу через фильтр 3 подается крегулятору 4 давления и муфте 5включения блокировки и к клапану бвключения муфты, проходит через регулятор 4 давления н муфте в гидро- ,фтрансформатор 7, а из него по сливному трубопроводу через регулятор 8давления в гидротрансформаторе сливается в бак. Провод гидронасосаосуществляется от нходного вала,жестко...
Предыдущий патент: Система экстремального регулирования уровня вибраций на металлорежущем станке
Следующий патент: Устройство для программного управления
Случайный патент: Всесоюзная. uate-;: .; . сеая д ёйблиотека ivibaн. и. мещеркин