Следящий привод
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
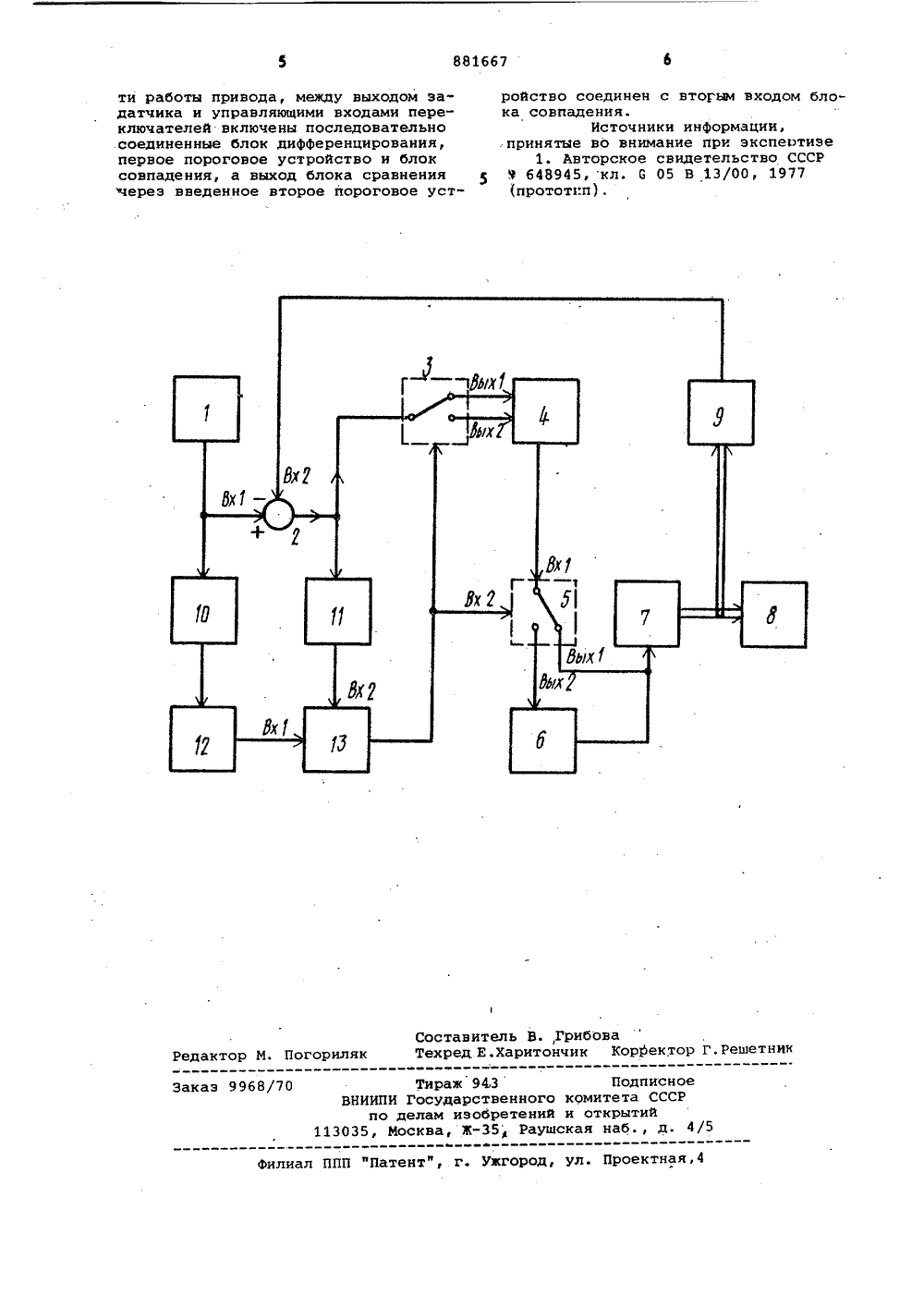
Союз Советских Социалистических РеспубликОПИСАНИЕ ИЗОБРЕТЕНИЯ пц 881667 К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(22) Заявлено 03. 03. 80 (21) 2890003/18-24с присоединением заявки йо(51)М. Кл.з С 05 В 13/00 Государственный комитет СССР по делам изобретений и открытий(54) следящий приВОд Изобретение относится к следящим приводам и предназначено для управления различными объектами с большим димпазоном скоростей, повышенными требованиями по статической точности и плавности движения на малых скоростях.По основному авт,св. Р б 48945 известен следящий привод,.содержащий последовательно соединенные задатчик, блок сравнения, первый переклю-, чатель, усилитель, второй переключатель, блок ограничения и исполнительный механизм, соединенный с нагрузкой и через датчик обратной связи с блоком сравнения 1). Однако у данного привода, имеющего ограничение сигнала управления скоростью, при значительных изменениях его параметров или случайных изменениях нагрузки в режиме малых скоростей, скорость отработки исполнительного механизма может стать меньше задающей, что приведет к нарушению работоспособности привода. для восстановления работоспособности известного привода требуется вмешательство оператора, но существует целый ряд объектов, функционирование которых исключает вмешательство оператора.Целью изобретения является повы шение надежности работы следящегопривода при случайных измененияхусловий эксплуатации, вызывающих изменение параметров привода, напримерего зоны нечувствительности или параметров нагрузки, например трения виспслнительном механизме. Поставленная цель достигаетсятем, что в следящий привод междувыходом задатчика и управляющими вхо 5 дами переключателей включены последовательно соединенные блок дифференцирования, первое пороговое устройство и блок совпадения, а выход блокасравнения через введенное второе.20 пороговое устройство соединен с вторым входом блока совпадения (следящего привода),Ра чертеже представлена структурная схема предлагаемого изобретения.25 Схема содержит эадатчик 1, блоксравнения 2, первый переключатель 3,усилитель 4, второй переключатель 5,блок ограничения б, исполнительныймеханизм 7, нагрузку 8, датчик обратной связи 9, блок дифференцирования 10, пороговые устройства 11 и 12, блок сравнения 13.Следящий привод через последовательно соединенные задатчик 1, блок сравнения 2, первый переключатель 3, усилитель 4, второй переключатель 5, блок ограничения 6, исПолнительный механизм 7, соединенный с нагрузкой 8 и через датчик обратной связи 9 с входом 2 блока сравнения 2.Через нормальноэамкнутые контакты переключателя 3 выход блока сравнения 2 подключен ко входу 1 усилителя 4, имеющего меньший коэф" фициент передачи, а через нормально- замкнутые контакты переключателя 5 выход усилителя 4 подключен ко входу исполнительного механизма 7, Выход эадатчика 1 дополнительно подключен ко входу блока дифференцирования 10, а выход блока сравнения 2 дополнительно подключен ко входу порогового 20 устройства 11, Выход блока дифференцирования 10 подключен ко входу порогового устройства 12. Выходы пороговых устройств 11 и 12 подключены ко входам 1 и 2 соответственно блока 25 совпадения 13, выход которого подключен к управляющим входам обоих переключателей 3 и 5. Пороговые устройства 11 и 12 построены таким образом, что сигнал на их выходе появляется тогда, когда величина входного сигнала меньше уровня срабатывания порогового устройства.Работа следящего привода происходит следующим образом.При работе привода в режиме отработки входных воздействий с большими значениями скоростей, когда величина сигнала на выходе блока 10 дифференцирования, пропорциональная этой скорости, превышает порог срабатыва ния порогового устройства 12, на его выходе сигнал отсутствует, соответственно отсутствует сигнал на выходе блока совпадения 13. В этом случае привоц работает как обычный следящий привод. Через нормальнозамкнутые контакты переключателей 3 и 5 вход 1 усилителя 4 подключен к выходу блока сравнения 2, а выхоп усилителя 4 ко входу исполнительного механизма 7 - соответственно. При уменьшении скорости входных воздействий настолько, что величина сигнала на выходе блока 10 дифференцирования меньше уровня срабатывания порогового устройства 12, на выходе его появляется сигнал, который поступает на вход 1 блока совпадения 13. Сигнал на выходе блока 13 совпадения появляется лишь при наличии сигнала и на входе 2 этого блока., т.е. когда выход бло- Щ ка 2 сравнения меньше порога срабатывания порогового устройства 11.Таким образом, только при отработке малых скоростей входных воздействий и когда величина ошибки приво да (выход блока 2 сравнения) достаточно мала, по сигналу с выхода блока 13 совпадения переключатель 3 переключает выход блока 2 сравнения с входа 1 на вход 2 усилителя 4, обеспечивающий больший коэФфициент усиления, а переключатель 5 подклю-. чает к выходу усилитель 4 блок 6 Ограничения, что, в целом, обеспечивает повышение статической точности привода и плавности отработки малых скоростей.Уровень напряжения срабатывания порогового устройства 12 выбирае" ся из условий, чтобы соответствующая ему скорость привода была меньше той, которая обеспечивается величиной уровня ограничения блока 6.Пороговое устройство 11 исключает подключение блока 6 ограничения в режимах отработки скачкообразных Сигналов (когда скорость входного воздействия после подачи скачка равна О), а также в тех случаях, когда при переходе в режим малых скоростей между задающей и отрабатывающей осями имеется большое рассогласование, до тех пор, пока рассогласование не уменьшится до величины, меньше порога срабатыва" ния порогового устройства 11. Уровень напряжения срабатывания порогового устройства 11 должен быть не менее максимальной динамической ошибки следящего привода при отработке малых скоростей.Были изготовлены макеты предлагаемого и известного следящих приводов, в которых в качестве исполнительного двигателя был применен гидромотор с повышенной величиной утечек рабочей жидкости. В режиме малых скоростей макет известного привола терял работоспособность, а макет предлагаемого привода с тем же гидро- мотором оставался работоспособным во всем диапазоне .рабочих скоростей, что подтвержает преимущество предлагаемого технического решения.Таким образом, в предлагаемом приводе исключается. возможность потери работоспособности привода при изменении параметров нагрузки или параметров самого привода, так как в зависимости от изменения входного воздействия обеспечивается автоматическое переключение структуры,что повышает надежность его работы, и, кроме того, расширяет область применения, включая системы, в которых скорость изменения входного зоздействия меняется случайно, например в системах слежения.Формула изобретенияСледящий привод по авт.св.9 648945, о т л и ч а ю щ и й с ятем, что, с целью повышения надежнос881667 ройство соединен с втогым входом блока совпадения.Источники информации,.принятые во внимание при экспертизе1. Авторское свидетельство СССР 5 9 648945, кл. О 05 В 13/00, 1977(прототип). Составитель В.,ГрибоваТехред Е,Харитончик Корректор Г,Решетн Редактор М. Погорил Тираж 943Государственного коми делам изобретений и от Москва, ЖРаушская аказ 9968/ ВНИИ и 13035, илиал ППП фПатент", г. ужгород, ул. Проектная,4 ти работы привода, между выходом задатчика и управляющими входами переключателей включены последовательно .соединенные блок дифференцирования, первое пороговое устройство и блок совпадения, а выход блока сравнения через введенное второе пороговое устПодписноеета СССРрытийаб., д. 4/
СмотретьЗаявка
2890003, 03.03.1980
ПРЕДПРИЯТИЕ ПЯ Г-4152
КИСЛИК МАТУС ВУЛЬФОВИЧ, КАМАНИН ВАЛЕРИЙ ВЛАДИМИРОВИЧ, БОНДАРЕНКО ЛЕОНИД БОРИСОВИЧ, ЛАПЕНИС ГЕННАДИЙ ЮЛИЯНОВИЧ, РЫДНИК ЕВГЕНИЙ АНАТОЛЬЕВИЧ, СМИРНОВ ЕВГЕНИЙ АЛЕКСЕЕВИЧ
МПК / Метки
МПК: G05B 13/00
Опубликовано: 15.11.1981
Код ссылки
<a href="https://patents.su/3-881667-sledyashhijj-privod.html" target="_blank" rel="follow" title="База патентов СССР">Следящий привод</a>
Устройство для защиты от аварий в приводах постоянного тока с регулированием скорости вращения

Номер патента: 1062824
Опубликовано: 23.12.1983
МПК: H02H 7/085
Метки: аварий, вращения, защиты, постоянного, приводах, регулированием, скорости
...вход схемы ИЛИ соединен с блоком ограничеция.Кроме того, согласующий блок содержит последовательно соединенные схему ИЛИ и элемент задержки, причем входы схемы ИЛИ являются входами, а выход элемента задержки выходом согласующего блока.На фиг. 1 - изображена структурная схема предлагаемого устройства; на фиг. 2 - структурная схема блока сравнения, первого блока распознавания дефекта и согласующего блока; на фиг. 3 - структурная схема второго блока распознавания дефекта и второго согласующего блока,Устройство для защиты от аварий в приводах постоянного тока содержит блок 1 задания, блок 2 сравнения, регулятор 3 скорости, регулятор 4 тока, выход которого через блок 5 управления соединен с исполнительным органол б, предназначенным для...
Устройство для обнаружения самовозбуждения блоков привода электронно-механических балансных часов

Номер патента: 1365043
Опубликовано: 07.01.1988
Авторы: Мещеряков, Молчанов, Мышев, Мышева
МПК: G04D 7/06
Метки: балансных, блоков, обнаружения, привода, самовозбуждения, часов, электронно-механических
...цепи питания импульсов тока привода, преобразуемых в импульсы напряжения преобразователя 20 3 ток - напряжение (фиг.4,л).На управляющий вход ключа 5 с выхода триггера 36 по шине Б подается управляющий импульс (фиг.4,и). Ключ 5 замкнут в интервале времени, содер жащем в данном случае один участок открывающей полярности сигнала освобождения, и на вход амплитудного детектора 6 поступит один импульс (фиг.4,м) с выхода преобразователя 3 30 ток - напряжение, Выделенное амплитудное значение (фиг4,н) с выхода детектора 6 делится в заданном отношении делителем 7 и затем в качестве опорного подается на один из входов компаратора 8. В дальнейшем сигнал с выхода преобразователя 3 ток - напряжение сравнивается компаратором 8 с выделенным опорным...
Устройство для автоматического регулирования скорости переплава электрода в вакуумной электродуговой печи

Номер патента: 1473090
Опубликовано: 15.04.1989
Авторы: Захарин, Кононов, Смирнов
МПК: H05B 7/148
Метки: вакуумной, переплава, печи, скорости, электрода, электродуговой
...а с выхода источника 31 питания на второй вход программного задатчика 28,поступает сигнал запрета на продолжение временной программы, По окончании прогрева электрода на его торце появляются капли расплавленного металла, что вызывает появление сигнала на выходе блока 3 вы-. деления напряжения капельных импульсовПри достижении сигнала на входе порогового элемента 17 установленного значения на его выходе появляется сигнал, который включает программный задатчик 16 веса и реле 14 времени и, воздействуя на второй управляющий вход ключевого блока 12, отключает его (если он до этого момента был на самоблокировке). Сигнал с выхода программного задатчика 16 поступает1473090 15 электрода. на вход блока 10 сравнения, на второй вход...
Устройство регулирования скорости привода клети прокатного стана

Номер патента: 471137
Опубликовано: 25.05.1975
Авторы: Барвинов, Журковский
МПК: B21B 37/52
Метки: клети, привода, прокатного, скорости, стана
...1.СВОГО прО.с 5 кутка сцГ 2,1 хп)1110 и я (1 УП включаст управляемый узел срав.сНя 9 ц прц цалцчцц сигнала рассоглсоваш 5 2 его выходе релейьй элемент 10 срайзтывает и подает напряжение постоянного уровня, соответствующее полярности на вход пропорционально-интегрального регулятора 11.Условию оптимальности переходного процесса для каждого конкретного тока нагрузки 7 ц соответствует условие Уяц.дцц. (Ц = цк.лцц. -ц -- сопз 1,Для выполнения этого условия необходимо, чтобы входное напряжение регулятора скорости на протяжении переходного процесса не зависело от приращения сигнала обратной связи по скорости, т. е. настройка интегрального канала должна компенсировать приращение напряжения обратной связи, поступающее с тахогенератора 4....
Устройство измерения скорости для системы управления тормозами колесного транспортного средства

Номер патента: 568349
Опубликовано: 05.08.1977
МПК: B60T 7/12
Метки: колесного, системы, скорости, средства, тормозами, транспортного
...начало передачисигналов от входа О к выхолу триггера 27 приусловии,что входной сигнал имеет знзчеие, отличное от хранящегося (в памяти) выходного сигнала.Каждый второй импульс а, поступающий отколес 1 и 19, создает врсмснцой импульс (синхроимпульс) к в логической схеме 28, составленной изкомбинации вентилей, причем этц временные им.пульсы создаются зз счс г объединения и интегрирования входных импульсов и и с от схемы формирования импульсов 28 и дслигсдя частоты 23. Такимже образом логическая схема 28 гепорирует (выра. 1 О 15 20 25 ЗО 35 40 45 50 60 батывает) также импульсы ц для возврата в исходное положение интегратора 25 после считывания (записи) в память триггера 27,Сигналы (импульсы), показанные на фиг, 4 системы...
Предыдущий патент: Самонастраивающаяся система регулирования
Следующий патент: Устройство для управления адаптивным роботом
Случайный патент: Центробежная машина