Самонастраивающаяся система регулирования
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
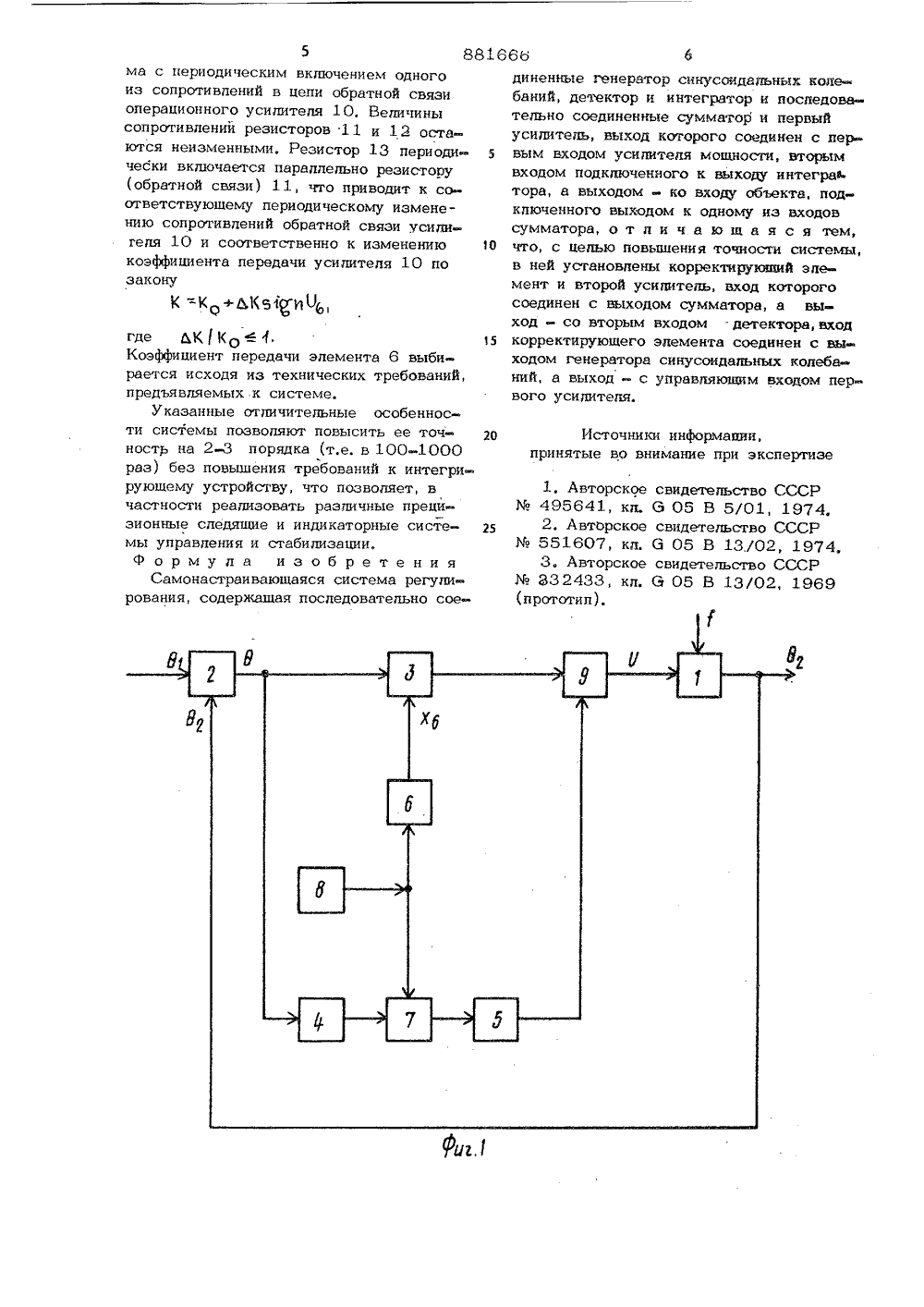
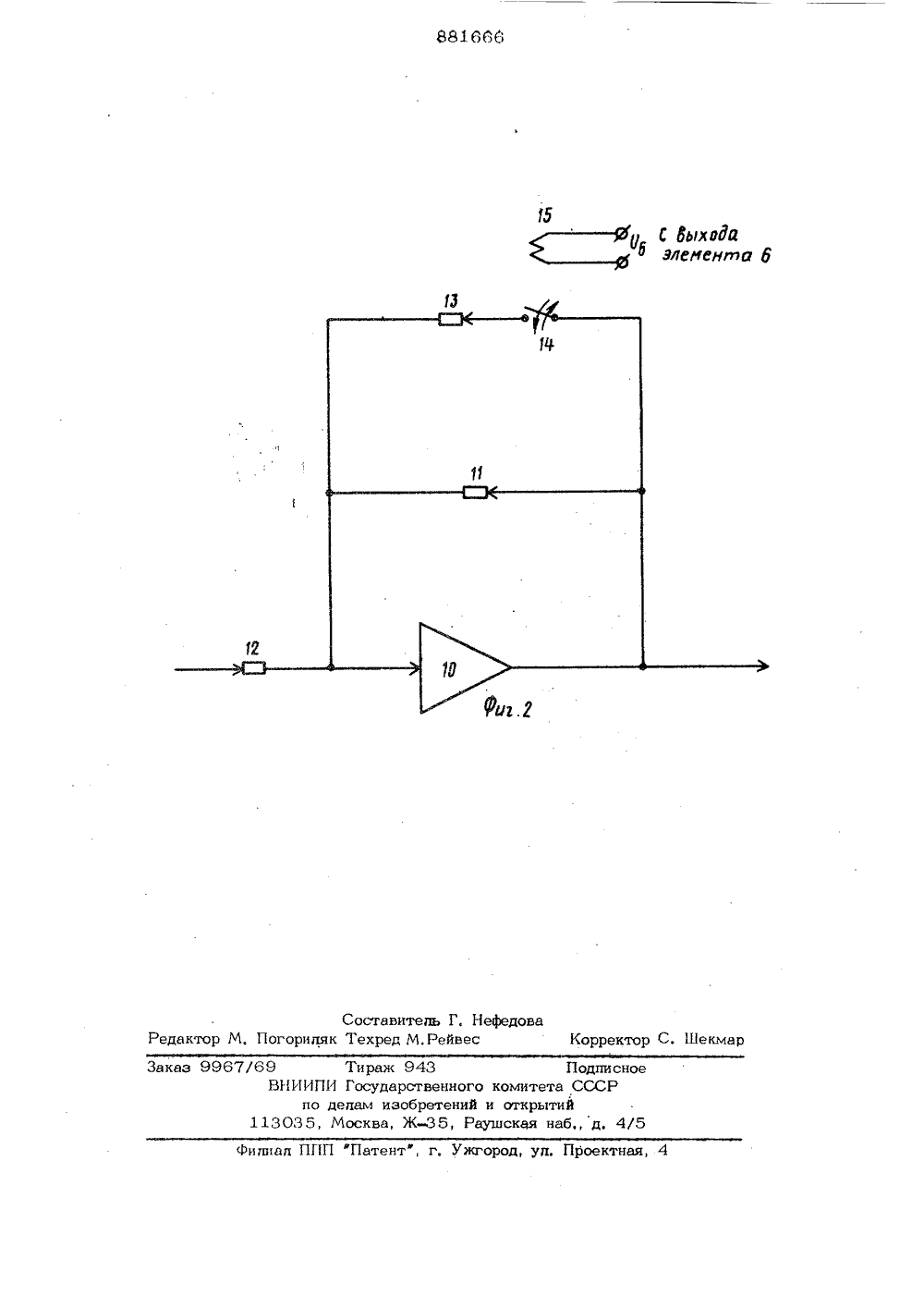
Союз СоветскикСоцнапистическмиРеспублик . ОП ИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ и 881666(5 )М. Кл. О 05 В 13/00 Государственный комитет по делам изаоретеиий и открытий(088,8) Дата опубликования описания 15.11.81 Б, П, Бодунов, Р. Е. Гинзбург, А, А. Гопи С. А. Уфимцев(54 ОНАСТРАИВАЮЩАЯСЯ СИСТЕМА РЕГУ АНИЯ иваюшимся системамточниками поискового ования с гнала и может ах ельными водными рулевых), теграпьмы выход енные10 одер- генеИзобретение относится к самонаст найти широкое применение в систтоматического управления летатаппаратами (в автопилотах) и поди надводными кораблями (в автоИзвестны пропорционально-инные самонастраиваюшиеся систепирования, содержащие сумматокоторого через параллельно сое усилитель и интегратор соединен соответственно с первым и вторым усилителями мощности, выкод последнего через испол нительный механизм соединен со входом объекта регулирования, выход которого соединен с одним из входов сумматора, и блок самонастройки, выходы которого соединены с упргвляюшими входами усилителя и интегратора (11 иНаиболее близкой по технической сущности к изобретению является самснастраиваюшаяся система регулирования, с жашая последовательно соединенные ратор синусоидальных колебаний, детектори интегратор и последовательно соединенные сумматор и первый усилитель, выходкоторого соединен с первым входом усипителя мощности, вторым входом подключенного к выходу интегратора, а выходом - ко входу объекта, подключенноговыходом к одному из входов сумматора 31.Однако эта система характеризуетсянедостаточной точностью.Белью изобретения является повышение точности системы.Поставленная цель достигается тем,что в системе установлены корректируюший элемент и второй усилитель, вход ко-.торого соединен с выходом сумматора, авыход - со вторым входом детектора,вход корректирующего элемента соединенс выходом генератора синусоидапьных колебаний, а выход - с управляюшим входом первого усилителя.На фиг. 1 приведена блок-схема системыф на фиг. 2 - первый усилитель, примерРреализации.Система содержит объект (регулирования) 1, сумматор 2, первый и второй усилители 3 и 4, интегратор 5, корректирующий элемент 6, детектор 7, генератор синусоидальных колебаний 8, усиди тель мощности 9, операционный усилитель, 10, резисторы 11-13, переключатель 14, управляюшую обмотку переключателя 15 Х -ВыхОднОЙ сигнал-Ого функционального блока системы,8,65,8, К, О - 0 соответственно входной и выходной сигналы, сигналы ошибки, возмущения и управления.В предложенной системе коэффициент передачи первого усилителя 3 меняется 15 в зависимости от сигнала генератора синусоидальных колебаний 8 по законуК +ь)(ЫМ ю 1,где К - постоянная часть коэффициентапередачи;ЬК,Ю- соответствено амплитуда и круговая частота изменения коэффициента передачи, причемЬКК (.25Амплитуда изменения коэффициента передачи усилителя 9 задается с помошьюэлемента 6, а круговая частота - с помощью генератора синусоидальных колебаний 8,30Предлагаемая система работает следующим образом.На входы сумматора 2 поступают входной (задающий) и выходной (регулируемая координата) сигналы системы. В сумматоре 2 они сравниваются. На выходесумматора 2 формируется сигнал рассог(ласования (ошибки) системы, который поступает на информационные входы первого и второго усилителей 3 и 4, При рассмотрении принципа работы системы учитываем, что постоянный сигнал на входедетектора 7, например фазового, не даетпостоянного сигнала на выходе.В течение первого полупериода измене 45ния коэффициента передачи усилителя 3при действии на систему сигнала возмущения 3. и противодействующего ему сигнала управления О в установившемся режиме появляется отличный от нуля сигнал50ошибки (регулирования) 9, Величина сигнала ошибки 6 пропорциональна разностисигналов 1-О В течение второго полупериода,изменения коэффициента передачиусилителя 3, когда он уменьшится по сравнению с Кц разность сигналов Х-возрастет, что вызывает увеличение величины сигнала ошибки (регулирования) 6 Та,ким образом, в среднем за период модуляции в выходных сигналах усилителей 3 й 9 появляется дополнительная периодическая составляющая, изменяющаяся синхронно с изменением коэффициентов передачи усилителя 3 и детектора 7; Наличие переменной составляющей в указанных сигналах, амплитуда которой пропорциональна сигналу ошибки (регулирования) О, обеспечивает на выходе детектора 7 наличие постоянного сигнала, который далее интегрируется в интеграторе 5 и поступает на второй вход усилителя мощности 9, Таким образом, к объекту 1 прилагается сигнал управления Ц, являющийся суммой выходных сигналов усилителя 3 и интегратора 5 и аналогичный тому, что формируется в классических системах с изодромным регулятором.Наличие же дрейфа нуля интегратора 5 вызывает появление изменения сигнала ошибки О с квазистатической постояннойскорости, которое не проходит через детектор 7, а проходит лишь через усилитель 3. Прохождение сигнала ошибки 6 через усилитель 3 с изменяющимся коэффициентом передачи вызывает появление периодической составляющей в составе сигнала управленияСигнал ошибки 6, содержащий периодическую составляющую, усиливается усилителем 4 и поступает на вход детектора 7. Детектор 7 выделяет из этого сигнала информацию, пропорциональную амплитуде переменной составляющей сигнала ошибки О Одновременно детектор 7 превращает в периодически меняющийся сигнал постоянную составляющую сигнала ошибки 6 и, что особенно важно, аддитивную помеху, имеюшуюся на выходе усилителя 4 и приводящую к нгсыщению интегратора 5. Эти периодические составляющие подавляются выходным фильтром, входяшим в состав детектора 7, Поставленный сигнал с выхода детектора 7 поступает на вход интегратора 5, Учитывая, что величина этого сигнала пропорциональна скорости изменения сигнала ошибки с (т.е. ее причине - дрейфу интегратора 5), причем сигнала, существенно усиленного в усилителе 4, Проинтегрированный сигнал, имеющий знак, обратный знаку сигнала дрейфа интегратора 5, и имеющий большую крутизну, чем в известном устройстве, компенсирует дрейфинтегратора 5. Практическая реализация изменения коэффициента передачи усилителя 3 может быть выполнена различными путями. Б качестве примера (фиг, 2) показана схема с периодическим включением одного из сопротивлений в цепи обратной связи операционного усилителя 10. Величины сопротивлений резисторов 11 и 12 остаются неизменными. Резистор 13 периодически включается параллельно резистору (обратной связи) 11, что приводит к соответствующему периодическому изменению сопротивлений обратной связи усиди- геля 10 и соответственно к изменению коэффициента передачи усилителя 10 по закону)( =к +)(фдО,где ЬК / К О -" "Коэффициент передачи элемента 6 выбирается исходя из технических требований, предъявляемых к системе.Указанные отличительные особенности системы позволяют повысить ее точность на 23 порядка (т.е, в 100-1000 раз) без повышения требований к интегрирующему устройству, что позволяет, в частности реализовать различные прецизионные следящие и индикаторные системы управления и стабилизации. Формула изобретенияСамонастраивающаяся система регули рования, содержащая последовательно соединенные генератор синусоидальных колебаний, детектор и интегратор и последовательно соединенные сумматор и первыйусилитель, выход которого соединен с первым входом усилителя мощности, вторымвходом подключенного к выходу интеграл.тора, а выходом - ко входу объекта, подключенного выходом к одному из входовсумматора, о т и и ч а ю щ а я с я тем,что, с целью повышения точности системы,в ней установлены корректирующий элемент и второй усилитель, вход которогосоединен с выходом сумматора, а выход - со вторым входом детектора, входкорректирующего элемента соединен с вьходом генератора синусоидапьных колебаний, а выход - с управляющим входом первого усилителя. Источники информации,принятые во внимание при экспертизеЗаказ 9967/69 Тираж 943 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж 35, Раушская набд, 4/5 Филиал ППП Патент", г. Ужгород, ул, Проектная, 4
СмотретьЗаявка
2887319, 21.02.1980
ПРЕДПРИЯТИЕ ПЯ В-8708
БОДУНОВ БОГДАН ПАВЛОВИЧ, ГИНЗБУРГ РОМАН ЕФИМОВИЧ, ГОЛОВАН АНДРЕЙ АНДРЕЕВИЧ, УФИМЦЕВ СЕРГЕЙ АЛЕКСЕЕВИЧ
МПК / Метки
МПК: G05B 13/00
Метки: самонастраивающаяся
Опубликовано: 15.11.1981
Код ссылки
<a href="https://patents.su/4-881666-samonastraivayushhayasya-sistema-regulirovaniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система регулирования</a>
Способ определения эквивалентной шумовой температуры входа усилителя
Номер патента: 1748514
Опубликовано: 09.01.1995
МПК: G01R 29/26
Метки: входа, температуры, усилителя, шумовой, эквивалентной
СПОСОБ ОПРЕДЕЛЕНИЯ ЭКВИВАЛЕНТНОЙ ШУМОВОЙ ТЕМПЕРАТУРЫ ВХОДА УСИЛИТЕЛЯ путем подачи на его вход шумового сигнала от эталонного источника шума, измерения уровня мощности шумового сигнала на его выходе и измерения значения М этого изменения, отличающийся тем, что, с целью повышения точности измерения, подают шумовой сигнал от эталонных источников шума с шумовой температурой T1 и T2 на вход дополнительного усилителя, шумовая температура которого идентична шумовой температуре измеряемого усилителя, и измеряют уровень мощности шумового сигнала P1 и P2 соответственно на его выходе, подают на вход измеряемого усилителя шумовой сигнал от эталонного источника шума с шумовой температурой T2, при...
Способ определения эквивалентной шумовой температуры входа усилителя

Номер патента: 1633984
Опубликовано: 30.11.1994
Авторы: Бережной, Очковский, Петровский
МПК: G01R 29/26
Метки: входа, температуры, усилителя, шумовой, эквивалентной
...усилителя измеренный в заданной полосе пропускания Ьт уровень Рг мощности шумового сигнала на выходе опорного усилителя равен гт- - - - ",- -т 1 к -тРв 5 где а- вносимое затухание тракта от выхода измеряемого усилителя до входа опорного усилителя на частоте измерения, Тш, отн.ед.;Ку - коэффициент усиления иэмерявмо го усилителя на частоте измерения Тш,отн.ед,.Измеренный в заданной полосе пропускания Ьуровень Рз мощности шумового сигнала на выходе согласованной нагрузки при температуре окружающей среды То равенРз К(То+ Ттр)Ктр Ю Вт. (3) При этом измеренное отношение разности уровней Р 2 и Р 1 к разности уровней Р 1 и 20 Рз мощности шумовых сигналов равноР -Р (Т +Т )К -Т2 1 о ш у оР -Р Тэоа Т +Т25 отн, ед.Отсюда путем простого...
Способ определения эквивалентной шумовой температуры входа усилителя
Номер патента: 1708065
Опубликовано: 27.01.1995
МПК: G01R 29/26
Метки: входа, температуры, усилителя, шумовой, эквивалентной
СПОСОБ ОПРЕДЕЛЕНИЯ ЭКВИВАЛЕНТНОЙ ШУМОВОЙ ТЕМПЕРАТУРЫ ВХОДА УСИЛИТЕЛЯ путем измерения в заданной полосе пропускания уровня мощности шумового сигнала P0 на выходе согласованной нагрузки при температуре окружающей среды То, отличающийся тем, что, с целью расширения функциональных возможностей при одновременном повышении точности измерения, измеряют в заданной полосе пропускания уровень мощности шумового сигнала P1 на выходе согласованного по входу измеряемого усилителя и уровень мощности шумового сигнала P2 на выходе опорного источника шумового сигнала с шумовой температурой Т, при этом определяют отношение разности уровней...
Способ измерения эквивалентной шумовой температуры входа усилителя
Номер патента: 1739755
Опубликовано: 27.01.1995
МПК: G01R 27/06, G01R 29/26
Метки: входа, температуры, усилителя, шумовой, эквивалентной
СПОСОБ ИЗМЕРЕНИЯ ЭКВИВАЛЕНТНОЙ ШУМОВОЙ ТЕМПЕРАТУРЫ ВХОДА УСИЛИТЕЛЯ, заключающийся в измерении мощности P1 шумового сигнала на выходе измеряемого усилителя при подключении к его входу согласованной нагрузки и мощности P2 шумового сигнала на выходе измеряемого усилителя при подаче на его вход шумового сигнала с шумовой температурой T, отличающийся тем, что, с целью обеспечения измерения шумовой температуры широкополосных СВЧ-усилителей и повышения точности, дополнительно измеряют мощность P3 шумового сигнала на выходе согласованной нагрузки, а эквивалентную шумовую температуру входа усилителя определяют по формулегде
Способ определения эквивалентной шумовой температуры входа усилителя

Номер патента: 1817556
Опубликовано: 27.03.1995
Автор: Очковский
МПК: G01R 29/26
Метки: входа, температуры, усилителя, шумовой, эквивалентной
...этого определяют шумовую температуру Тш измеряемого усилителя из выражения;ТафМоТ = (Т-Т )-Т + - , К.,ш Р К о о К(5) ТТ = (Т -Т)-Т + - , К,ш ффК о о К где ар - вносимое затухание тракта отвыхода измеряемого усилителя и опорногоисточника шумового сигнала соответственно до входа измерителя мощности шумового сигнала, отн.едКу - коэффициент усиления измеряемого усилителя, отн,ед,При этом интервал, в котором с вероятностью 0,95 находится допустимая суммарная относительная погрешность дТшизмерения шумовой температуры Тш, определяется из выражения:Так, например, если а = Р=1, да=дф,1,5%; Т=80 Кдт 2 %; Ку=100,дку,25%;Тш=170,8 К, М=212,64, дм,5% значениедтш 7,4%.Отсюда очевидно, что при прочих равных условиях со способом-прототипом, точность...
Предыдущий патент: Пневматическое устройство управления
Следующий патент: Следящий привод
Случайный патент: 2 -фазная преобразовательная система электропитания