Способ дистанционного управления механизированной крепью
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 781367
Авторы: Алямовский, Кувшинов, Михайлов, Мушкин, Панчук, Пономаренко, Снигирев, Шеин

Текст
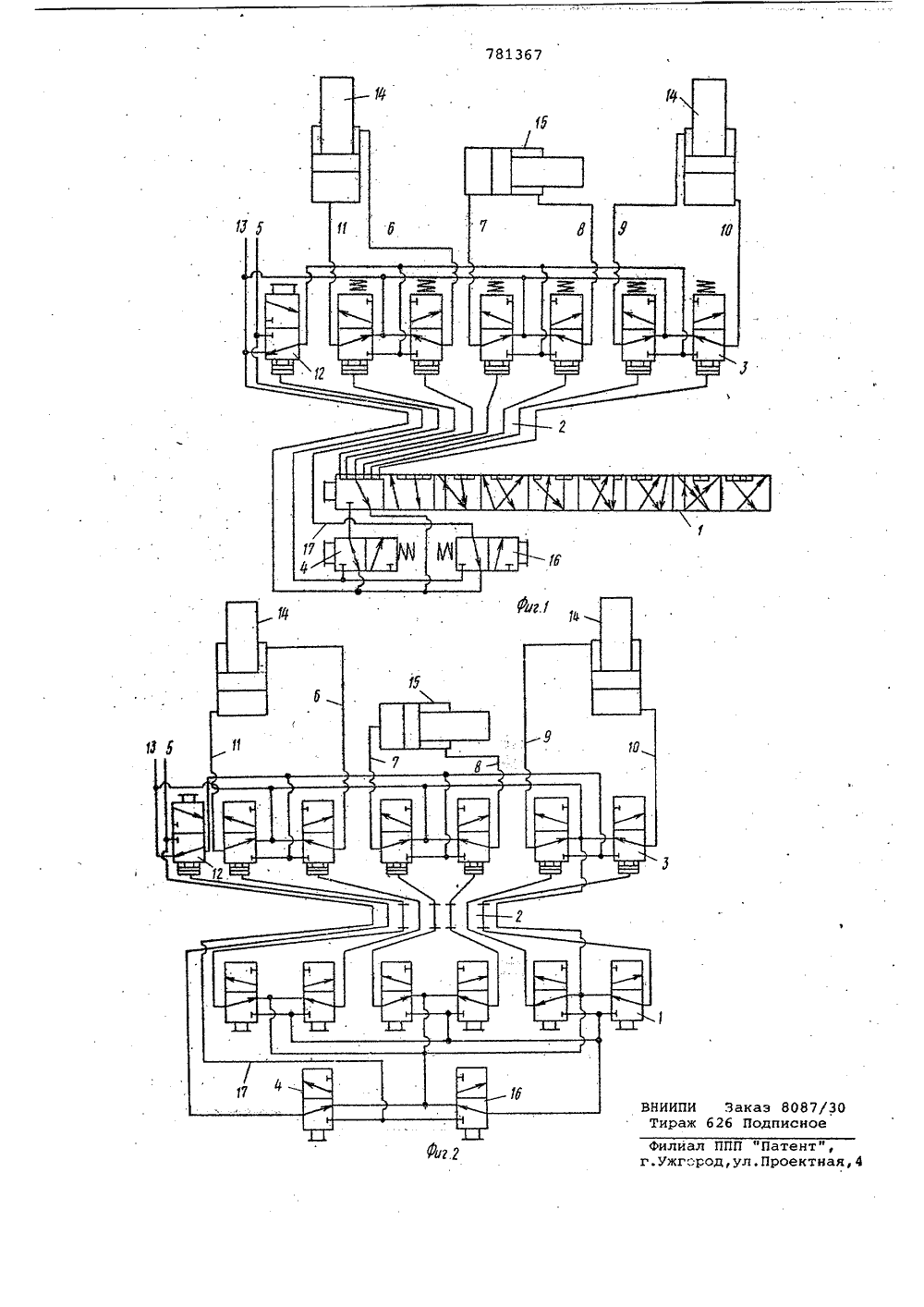
Союз Советскик Соцнеанстичеекнх Реснублик(У) К 3 Е 21 0 23/16 с присоединением заявки Ио(23) ПриоритетГосударственный комитет СССР ио делам изобретений и открытий(0888) Дата опубликования описания 27.11.80 Е, И. Панчук, Ю. Ф. Пономаренко, Ю. Г, Юеин,и й. Михайлов, В. М. Снигирев, В. А. Алямовский,В. М, Кувшинов и А. С. Мушкин(72) Авторы изобретения Эрдена Трудового Красного Знамени институт горногодела им. А. Л. Скочинского Министерства угольнойпромышленности СССР(51) СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МЕХАНИЗИРОВАННОЯ КРЕПЬЮИзобретение относится к горному делу и может быть. использовано в ме ханизированных крепях,Известен способ управления механизированной крепыш, при котором переключают и удерживают два командных распределителя при подведенном к ним давлении жидкости от напорной магистрали, в результате чего переключают силовой распределитель и одновременно открывают отсечной элемент, соединяя напорную магистраль с полостью силового цилиндра 1Недостаток .известного способа состоит в том, что переключения силового распределителя при подведенном к нему давлении могут приводить кпульсациям давления.в гидромагистрали и "зависаниям" силового распреде" лителя в промежуточном положении(отказам системы управления). Постоянное нахождение командных распределителей под давлением рабочей жидкости приводит к большим усилиям переключения командных распределителей и ускоренному их износу,Кроме того, отсутствие жесткой фиксации командного распределителя усложняет управление. 2Наиболее близким по техническойсущности к предлагаемому являетсяспособ дистанционного управления механизированной крепыш, включающийпереключение и Фиксацию командного,распределителя, подвод к нему рабочей жидкостй от напорной магистрали,переключение силового распределителяи соединение силового распределителя О с напорной магистралью 21 .Недостатком известного технического решения является фзависание" силового распределителя в промежуточномположении, обусловленное его перек лючениями при подведенном к нему давлении.Кроме того, постоянное нахождениекомандных распределителей под давлением рабочей жидкости приводит к 20 большим усилиям переключения и ускоренному износу командных распределителей.Цель изобретения - повышение надежности управления путем исключения 25 влияния переходных процессов и гидродинамических сил на работу распредетителейУказанная цель достигается тем,что соединение командного распредели теля с напорной магистралью и переключение силового распределителя про"изводят после переключения и фиксации командного распределителя и передсоединением силового распределителяс напорной магистралью.На фиг, 1 и 2 приведены схемы систем дистанционного управления мехкрепью.Дистанционное управлениемехкрепъюосуществляется следующим образом.Переключают вручную и Фиксируютмногопозиционный командный распределитель 1, в зависимости от выбраннойпозиции имеющий возможность соеФянятьодин или два выходных канала со своим напорным вводом и каналами многоканального рукава 2, сообщающимисяс управляющими полостями соответствующих силовых распределителей З,которые подготавливаются к переключению(фиг.1),После этого переключают вручнуюи фиксируют отсечной клапан 4, в результате чего его выход соединяетсяс йапорной магистралью 5 и подготовленные ранее к переключению силовыераспределители 3 занимают положение,при котором их выходы 6-11 соединя-,ются со своими напорными вводами,сообщенными через отсечной клапан 12 со-сливнич трубопроводом 13.Подготовленные гидравлические цепи, соединяющие выходы соответствующих силовых распределителей 3 с полостями силовых гидроцнлиндров 14 или15, сообщаются с напорным .трубопроводом 5 через отсечной клапан 12 путем нажатия рукоятки отсечного клапана 16, подающего управляющий импульспо каналу 17 многоканального рукава2 на включение отсечного клапана 12,Для прекращения выполнейия рабочейоперации снимают ручное воздействиена рукоятку отсечного клапана 16,затем устанавливают в исходное положе ние отсечной элемент 4, а командныйраспределитель 1 переводят либо в исходное положение, либо в положение,подготавливающее выполнение последующей операции.Вариант системы днстанционного управления(фиг.2) отличается от описанного выше лишь"конструктивным выполнением командногб распределителя,состоящего из набора трехлинейных расГ пределительных элементов с механическим переключением и фиксацией в ко-личестве, равном числу силовых распределителей. В этом случае вместоперевода в нужную позицию многопозиционного командного распределителя(фиг.1) производится механическое переключение и Фиксация необходимогоколичества двухпознционных командныхраспределителей, а в остальном порядок выполнения операций будет аналогичным описанному выше.Предлагаемый способ дистанционногоуправления механизированной крепышимеет ряд отличий, совокупность которых обеспечивает включение как ко мандных, так и силовых распределителей без предварительного подвода кним давления напорного трубопровода,что позволяет снизить усилия при пе-.реключении распределительного элемен-, 2 р та, уменьшить вибрацию и износ клапанных пар, "зависание" распредели-.теля в его промежуточном положении,25Форбфла изобретенияСпособ дистанционного управЛениямеханизированной крепыш, включающийпереключение н фиксацию командногоЗОраспределителя, подвод к нему рабочей жидкости от напорной магистрали,переключение силового распределителя и соединение силового распределителя с напорной магистралью, о т л и"ч а ю щ и й с я тем, что, с целью35 повышения надежности управления пу"тем исключения влияния переходныхпроцессов и гидравлических сил наработу расПределителей, соединениекомандного распределителя с напорной4 О магистралью. и переключение силовогораспределителяпроизводМт после переключения и Фиксации командного рас пределителя и перед соединением си"лового распределителя с напорной ма 45гистралью.источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССРР 470637, кл. Е 21 0 21,йб, 18,05.73.2. Авторское свидетельство СССР50 Р 443998, кл. Е 21 0 23/16, 11.05.73781367 8087/30 исное Филиал ППП "Патент",Ужгород,ул.Проектная,
СмотретьЗаявка
2629847, 19.06.1978
ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ИНСТИТУТ ГОРНОГО ДЕЛА ИМ. А. А. СКОЧИНСКОГО
ПАНЧУК ЕВГЕНИЙ ИВАНОВИЧ, ПОНОМАРЕНКО ЮРИЙ ФИЛИППОВИЧ, ШЕИН ЮРИЙ ГЕОРГИЕВИЧ, МИХАЙЛОВ ИГОРЬ ФЕДОРОВИЧ, СНИГИРЕВ ВЛАДИМИР МАКСИМОВИЧ, АЛЯМОВСКИЙ ВИКТОР АНДРЕЕВИЧ, КУВШИНОВ ВАДИМ МИХАЙЛОВИЧ, МУШКИН АНАТОЛИЙ СЕРГЕЕВИЧ
МПК / Метки
МПК: E21D 23/16
Метки: дистанционного, крепью, механизированной
Опубликовано: 23.11.1980
Код ссылки
<a href="https://patents.su/3-781367-sposob-distancionnogo-upravleniya-mekhanizirovannojj-krepyu.html" target="_blank" rel="follow" title="База патентов СССР">Способ дистанционного управления механизированной крепью</a>
Устройство для дистанционного управлениярукояткой переключения коробкипередач при испытаниях tpaktopa

Номер патента: 802829
Опубликовано: 07.02.1981
Авторы: Георгиевский, Горбаченко, Котов, Поликер
МПК: G01M 17/007
Метки: tpaktopa, дистанционного, испытаниях, коробкипередач, переключения, управлениярукояткой
...Шток 12 цилиндра выдвигается из цилиндра, перемещает скобу 3 и рукоятку 1.10 15 20 и ЗО зз 40 45 Диск с пазом 20 свободно проходит упор 8 и шток 12 движется до упора поршня в переднюю стенку цилиндра 14.При этом рукоятка 1 переключения передач занимает положение, соответствующее включению второй передачи в коробке передач, По команде с пулььта управления 18 отключается распределитель 16, обе лопасти цилиндра соединяются с атмосферой. ПОС- ле этого с пульта управления отключается электромагнит 28 и под действием пружины 24 двуплечий рычаг возвращается в прежнее положение. Для выключения второй передачи по сигналу от пульта управления 18 включается электромагнит 28, его якорь 26 втягивается и тяга 24 поворачивает двуплечий рычаг на...
Устройство для переключения ответвлений силового трансформатора в электроприводе

Номер патента: 300939
Опубликовано: 01.01.1971
МПК: H02P 5/12
Метки: ответвлений, переключения, силового, трансформатора, электроприводе
...при регулированин скорости изменением якорного напряжения при номинальном возбуждении двигателя. Горизонталь 13 определяет ожидаемоезначение момента нагрузки. Выделенные наоси н значения определяют;о- номинальное значение скорости двигателя;хн 1 п.Нпах, - ЗадаННЫй ДИВПазоН рЕГуЛНрования скорости;н, - граничное значение скорости, при данных значениях диапазона регулирования и момента нагрузки, при которомпереходят с регулирования возбуждением на регулирование изменение иякорного напряжения, путем изменения угла управления вентилями преобразователя.Для определения положения переключателя Ответвлений аночного трансформатора,обеспечивающего наибольший коэф 11".ициентмощности, должны быть известны минимальНая Н пп, И МаКСИМаЛЬНая О,х...
Устройство для переключения ответвлений силового трансформатора

Номер патента: 599326
Опубликовано: 25.03.1978
МПК: H02P 13/06
Метки: ответвлений, переключения, силового, трансформатора
...10режима.Питание системы управления 6 переключающим устройством осуществляется отвторичной обмотки 10 низкого напряжениярегулируемого трансформатора, формирователь 9 управляющих импульсов может бытьвыполнен в виде генератора прямоугольныхимпульсов,При нормальной работе устройства, система управления 6 выдает сигналы на один 20из тиристорныхблоков 1, 2, 5, включая еговработу.Формирователь 9 не работает, так какищцщжения загиба вольт-амнерной характристики варистора 8 несколько выше, чеммаксимальное рабочее напряжение на тиристорном блоке 5, и, следовательно, питаниеиа формирователь 9 не поступает.При возникновении короткого замыкания.датчик 7 посылает сигнал системе управлекия 6, Система управления 6 прекращает Жподачу импульсов...
Дистанционный механизм переключения передач

Номер патента: 893609
Опубликовано: 30.12.1981
Авторы: Евстратовский, Кисляков, Ярошевич
МПК: B60K 20/12
Метки: дистанционный, механизм, передач, переключения
...механизм переключения передач имеет вал 1, который соединен с рычагами 2 и 3 переключения передач и установлен в корпусе 4. фиксатор выполнен в виде нагруженного пружиной 5 шарика 6 и опорного элемента 7. Опорный элемент 7 снабжен выступом 8, который установлен с возможностью блокирования шарика 6 фиксатора. На валу 1 выполнены выемка 9 для установки шарика 6 фиксатора .при положении механизма переключения в нейтральном полонении и канавки 1 О .цляоставитель Ю.Наумо ехред А.Бабинвц, Кор С.Щомак . Редактор Н.Ч л Тираж Государствен по делам изоб 35, Москва, Ж35 Подписное омитета СССР й и .открыиийская наб., д. аказ 11351/24ВНИИПИ ого к етени Рауш Ужгород, ул. Проек атент" Филиал 3 89 установки шарика 6 при переключении передач.Механизм...
Упор силового узла для путевого управления распределителем

Номер патента: 1105879
Опубликовано: 30.07.1984
МПК: G05G 21/00
Метки: путевого, распределителем, силового, узла, упор
...при осевом смещении егонажимного элемента и, соответственно, золотника распределителя,Поскольку длина рабочей подачисилового узла определяется длинойучастка сопряжения упора нажимнымэлементом, на котором нажимнойэлемент утоплен и его осевое смещениеостается без изменения, то тем точнее установлена длина этого рабочего 5сопряжения, тем меньше уходит времени на холостые(без обработки детали)перемещения.Недостатком конструкции такогоупора является то, что точная длина 50рабочей подачи выставляется дополнительной подшлифовкой рабочей поверхности упора по месту установки насиловом органе и после проведенияиспытаний. Такое изменение программы управления распределителем является сложным и трудоемким, поэтому подшлифовку упора выполняют не...
Предыдущий патент: Устройство контроля состояния гидросистемы шахтной крепи
Следующий патент: Способ проветривания газообильного очистного забоя
Случайный патент: Изгйеритель загрузки двигателяфгшп cgt; amp; ff: t; iчип; 4 u.; =: f; -i t; -чgt; amp; (