Способ регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 747747
Авторы: Бондаренко, Корсаков, Стекольщиков, Юренко
Текст
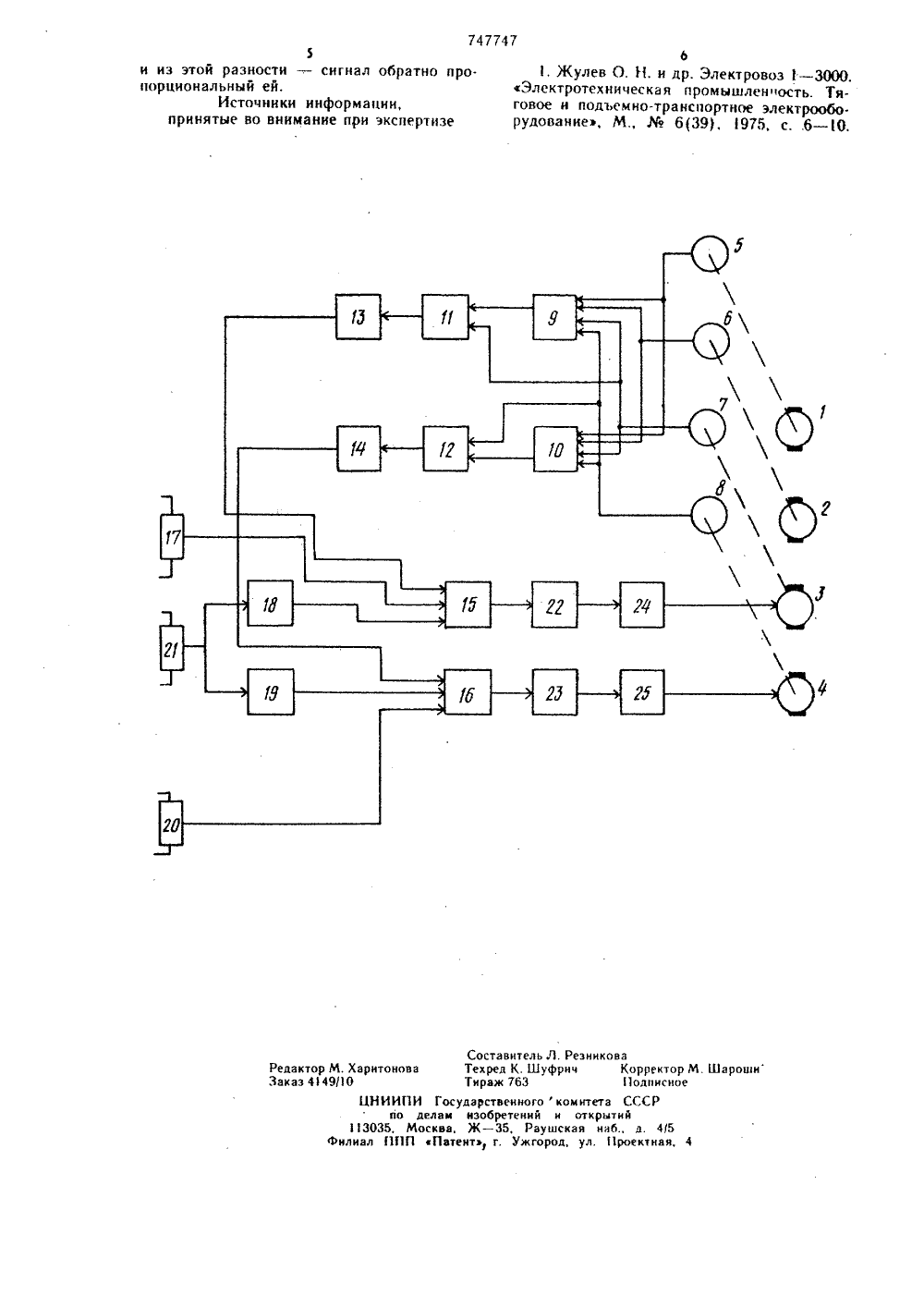
ОП ИСАНИЕИЗОБРЕТЕН ИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскккСоцкапксткческккРеспублик и 747747(53) УДК 629 423. .1 (088,8) Опубликовано 15.07.80. Бюллетень26Дата опубликования описания 25.07.80 ов допек нэобретеннй и открытнй(54) СПОСОБ РЕГУЛИРОВАНИЯ СИЛЫ ТЯГИ И ТОРМОЖЕНИЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА ПРИ АВТОМАТИЧЕСКОМ УПРАВЛЕ 1-ИИИзобретение относится к электрооборудованию подвижного состава железных дорог и предназначено для автоматического регулирования сил тяги и торможения электровозов.Известен способ регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении путем сравнения сигналов, пропорциональных заданной и истинной скорости, сравнения полученного сигнала с сигналом, пропорциональным заданному значению силы тяги и торможения, выделения минимального из них и воздействия полученным сигналом на исполнительный орган 1.Этот способ регулирования силы тяги и торможения при автоматическом управлении не позволяет реализовать предельные по условиям сцепления силы тяги и торможе. ния, так как при боксовании или юзе выделяют разность напряжений тяговых деталей н полученным сигналом воздействуют на реле боксования или юза, а с помощью реле скачкообразно воздействуют на исполнительный орган для снижения на определенную, наперед заданную величину силы тяги или торможения, независимо от глу 2бины боксования или юза. После восстановления сцепления сила тяги или торможения скачком восстанавливается. Скачкообраз. ное изменение силы тяги или торможения на фиксированную величину це учитывает состояние сцепления в каждый конкретный момент времени. Сцепление может восстанавливаться при незначительном уменьшении силы тяги или торможения, а сброс во всех случаях производят до определенного наперед заданного уровня. который может быть значительно ниже допустимого (допустимый уровень определяется коэффи циентом сцепления, величина которого переменна и может изменяться в широких пределах), В результате реализованная средняя сила тяги или торможения оказывается ниже предельной по сцеплению.Цель изобретения - реализация предельных по условиям сцепления сил тяги и торможения.Поставленная цель достигается тем, что сигнал, пропорциональный истинной скорости, толучают путем непрерывного выделенияминимального при тяге и максимального при торможении сигнала, цропорциоцаль. ного частоте вращения тяговых двигателей, 747747Формула изобретения сравниваот их с сигналами, проиорциоцаль. ными частоте враин ния каждого тягового двигателя, выделяюг разность между ними и нз этой разности - сигнал, обратно пропорциональный ей.Иа чертеже показана схема осуществле. цие предлагаемого способа управление одним двигателем в тяге и одним двигателем при торможении; управление остальными двивлелями аналогично).Схема содержит тяговые двигатели 14, чалота вращения которых замеряется датчикаеи 5 - 8 частоты вращения, подключенных на входы блоков 9 выделения минимального сигнала и 10 выделения максимального сигнала, выходы которых соединены с входами блоков 11 и 12 сравнения частоты вращения одного двигателя с минимальной и максимальной частотой соответсгвенно. Блоки 13 и 14 выделения обрат. нб пропорциональной величины входами под; ключецы соответственно к выходам блоков 11 и 2 э а выходами к блокам 15 и 16 сравнения. Другие входы блока 15 сравнения соединены с задатчиком 17 тока (силы тяги) и с выходом регулятора 18 скорости, а другие входы блока 16 сравнения соединены с регулятором 9 скорости при торможении и задатчиком 20 тормозной силы, задатчик 21 скорости подключен к входам регулятора 18 ц 19 скорости,Устройство содержит также регуляторы 22 и 23 тока (силы тяги и тормозной силы) и исполнительные блоки 24 и 25.Предлагаемый способ осуществляется следующим образом. При пуске электровоза задатчиками 17 - 21 дают пусковой ток (силу тяги) и скорость движения, с которой электровоз должен двигаться на перегоне. До выхода на заданную скорость, при отсутствии боксования, из трех сигналов, поступающих на вход блока сравнения с выхода регулятора 18 скорости, с задатчика тока (силы тяги) и с блока 13, минимальный сигнал с задатчика тока силы тяги), поскольку рассогласование между заданным и истинным значением скоростей движения электровоза при пуске большое, и, следовательно, на выходе регулятора скорости сигнал большой величины На выходе блока 13 также имеется сигнал большой величины, так как на входе (при отсутствии боксования) сравниваются примерно равные величины, а блок 3 выделяет обратно пропорциональную величину этой разности, Таким образом, сигнал с задатчика тока в этот период поступает на вход регулятора тока (силы тяги) в качестве установки и обрабатывается системой автоматического регулирования, т. е, пуск осуществляется с заданным током (силой тяги) В режиме стабилизации скорости, когда заданное и истинное значение скоростей 1 Р 2 Р 25 почти сравнцвактся, минимален сигнал с выхода регулятора скорости. Этот сигнал служит уставкой ре улятора скорости тока (сцлы тяги). Система находится под контролем регулятора скорости. В это время токовый контур разомкнут. о как только возникает пробуксовка (чаще всего в ре. жиме пуска) какой. нибудь колесной пары, сигнал на выходе элемента 13 начинает уменьшаться, так как на его выходе растет разность между минимальной частотой вращения двигателей и боксующим двигателем. Выход блока 13 умецьиэается по мере роста этой разности, т, е. по мере увеличе. ция глубины буксования. Как только он становится меньше двух сигналов он начинает определять величины уставки регулятора тока (силы тяги), а следоватечьно, и ток боксуюцего двигателя Уменьшается уставка регулятора и ток буксующего дви. гателя присутствует ло тех пор, пока не прекратится буксование. По мере восстановления сцепления разность на входе блока 13 уменьшается, следовательно, сигнал на выходе соответственно увеличивается и, следовательно, ток буксующего двигателя растет до прежнего значения. Уменьшение тока буксующего двигателя происходит пропорционально глубине буксования и в каждый конкретный момент времени соответствует состоянию сцепления. Технико-экономические преимущества предлагаемого способа заключаются в том, что он позволяет реализовать предельную по условиям сцепления силу тяги и торможе. ния, кроме того, позволяет уменьшить износ бардажей и тормозных колодок) так как выявляет срыв сцепления в самый начальный момент и не дает развиваться процессу буксования или юза. Способ регулирования силы тяги и торможения электроподвижцого состава при автоматическом управлении путем сравнения сигналов, пропорциональных заданной и истинной скорости, сравнения полученного сигнала с сигналом пропорциональным заданному значению силы тяги и торможения и выделения минимального из них, и воздействия полученным сигналом ка исполнительный орган, отличаюи(ийся тем, что, с целью реализации предельных по условиям сцепления сил тяги и торможения, сигнал, пропорциональный истинной скорости получают путем непрерывного выделения минимального при тяге и максимального при торможении сигнала, пропорционального частоте вращения тяговых двигателей, сравнивают их с сигналами, пропорциональными частоте вращения каждого тягового двигателя, выделяют разность между ними747747 5и из этой разности в . сигнал обратно пропорциональный ей.Источники информации,принятые во внимание при экспертизе ь1, Жулев О, Н. и др. Электровоз 1 - 3000, Электротехническая промышленность. Тяговое и подъемио-транспортное электрооборудование, М.,б(391, 975, с.,6 в ,. Резникова рич К ректор Мписное 4/5 тиая, едактор М. Харитоноваак аа 4149/10ЦНИИПИпо1 ЗОЗЬ, МФилиал ППП Составител Техред К. Ш Тираж 76 З Государственного елам изобретений сква, Ж - 35, Рау Патент г. Ужго Покомитета СС н открнтий шская няб., д род, ул. Проек
СмотретьЗаявка
2453957, 18.02.1977
ПРЕДПРИЯТИЕ ПЯ Г-4847
БОНДАРЕНКО ЕВГЕНИЙ МИХАЙЛОВИЧ, КОРСАКОВ ГЕННАДИЙ МИХАЙЛОВИЧ, СТЕКОЛЬЩИКОВ ВЛАДИМИР АЛЕКСАНДРОВИЧ, ЮРЕНКО ИВАН КОНДРАТЬЕВИЧ
МПК / Метки
МПК: B60L 15/20
Метки: автоматическом, силы, состава, торможения, тяги, управлении, электроподвижного
Опубликовано: 15.07.1980
Код ссылки
<a href="https://patents.su/3-747747-sposob-regulirovaniya-sily-tyagi-i-tormozheniya-ehlektropodvizhnogo-sostava-pri-avtomaticheskom-upravlenii.html" target="_blank" rel="follow" title="База патентов СССР">Способ регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении</a>
Способ регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении

Номер патента: 1068305
Опубликовано: 23.01.1984
МПК: B60L 15/20
Метки: автоматическом, силы, состава, торможения, тяги, управлении, электроподвижного
...значения соответствующих параметров. Разностью между заданными и фактически достигнутыми значениями регулируемых, параметров, усиленной и преобразованной, воз действуют на величину угла открытия тиристоров преобразователей 9 и 10.В зависимости от угла открытия тиристоров преобразователя регулируют силу тяги торможения электровоза. До тех пор, пока не возникает боксование или юз колесных пар, Процесс регулирования не имеет отличий от известного способа.При медленно развивающемся боксовании (или . юзе) одной или нескольких колесных пар разность между минимальной частотой вращения и частотой вращения боксующей колесной пары (или между максимальной частотой вращения и частотой вращения юзующей колесной пары) будет возрастать...
Устройство для регулирования силы торможения транспортного средства

Номер патента: 867288
Опубликовано: 23.09.1981
Автор: Эрих
МПК: B60T 8/02
Метки: силы, средства, торможения, транспортного
...и передается по каналам 33 и 34 в усилитель35, а по каналам 36-39 - в обмотки14-17 таким образом, .что части 10.2и 11.2 обоих трехпоэиционных клапанов 10 и 11 перекрывают .тормозныемагистрали. В тормозные цилиндры 1и 2 давление не поступает иэ магистр.али 22Возбуждение соответствующих обмоток происходит не сразу, а по истечении определенного промежутка времени. На фиг. 3 описанное изображеноломаной линией с перегибом в точ"ке К для характеристики тормозныхсил задней оси, в то время как характеристика передней оси остается прежней (прямая линия).На фиг. 4 изображены соотношения сил при разгруженном наполовину и полностью загруженном автомобиле. Для половинной нагрузки точка перегиба К, определяющая срабатывание клапанов 10 и 11,...
Способ регулирования сил тяги и торможения электроподвижного состава

Номер патента: 1416346
Опубликовано: 15.08.1988
МПК: B60L 15/20
Метки: сил, состава, торможения, тяги, электроподвижного
...непрерывно выделяющих минимальный из входных сигналов, который и становится заданным значением регуляторов тока 11 (силы тяги) и 12 (тормозной силы). В процессе разви 55 тия буксования или юза выходные сигналы блоков 2 и 28 уменьшаются и, становясь с некоторого момента мень 6 4ше других входных сигналов блоков 29 и 30, определяют уставки соответствующих регуляторов, что приводит к уменьшению токов буксирующего или юзующего двигателя на величину, пропорциональнуи глубине буксования (или юза) и к прекращению самого процесса буксования (или юза). Быстрейшему прекращению буксования или юза способствует и подача песка под колесные пары, которая продолжается одновременно со снижением тока буксующего (юзующего) двигателя.Для реализации...
Устройство для автоматического регулирования сил тяги и торможения электроподвижного состава

Номер патента: 1068306
Опубликовано: 23.01.1984
Авторы: Гончаров, Ефремов, Калиниченко, Квасов, Николаев
МПК: B60L 15/28
Метки: сил, состава, торможения, тяги, электроподвижного
...принципиальная схема устройства для автоматического регулирования сил тяги и торможения электроподвижного состава.Устройство для автоматического регулирования сил тяги и торможения электроподвиж,ого состава содержи г на каждом вагоне датчики 1 и 2 (фиг, 1) загрузки вагона, соединенные непосредственно и через элементы 3 и 4 НЕ с одними и другими входами дешифратора 5, третьи входы которого подключены к поездному проводу 6, соединен. ному с выходом датчика открывания дверей вагона, а к первому, второму и третьему выходам дешифратора 5 подключены пер,вые входы соответственно триггеров 7 - 9, вторые входы которых соединены соответственно со вторым, третьим и первым выходами дешифратора 5, а выходы - с; входами элементов 10 И,...
Модулятор силы торможения

Номер патента: 1321368
Опубликовано: 30.06.1987
МПК: B60T 8/40
Метки: модулятор, силы, торможения
...создать более 10 высокое давление, Установлено также, что подходящим по мощности двигателем является двигатель с пусковой мощностью 350 Вт. После запуска двигателя потребная мощность снижается 5 примерно до половины этого значения и, поскольку в ходе торможения,управляемого посредством системы,длительность периодов растормаживания и торможения примерно одинакова, сред . няя потребная мощность составляет примерно 100 Вт. Это относится к очень сильным тормозам, например задним тормозам на очень тяжелых грузовых автомобилях. Для передних колес тех же грузовых автомобилей потребная мощность составляет лишь примерно половину этого значения. Давление жидкости в камере 30 30 разгрузочного цилиндра 27 передается по трубопроводу 32 в...
Предыдущий патент: Привод независимого вала отбора мощности транспортного средства
Следующий патент: Устройство для контроля состояния проводов тяговой сети электрических железных дорог
Случайный патент: Способ изготовления проволоки из технического титана