Зубчатый привод исполнительных органов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 744176
Автор: Корнюхин

Текст
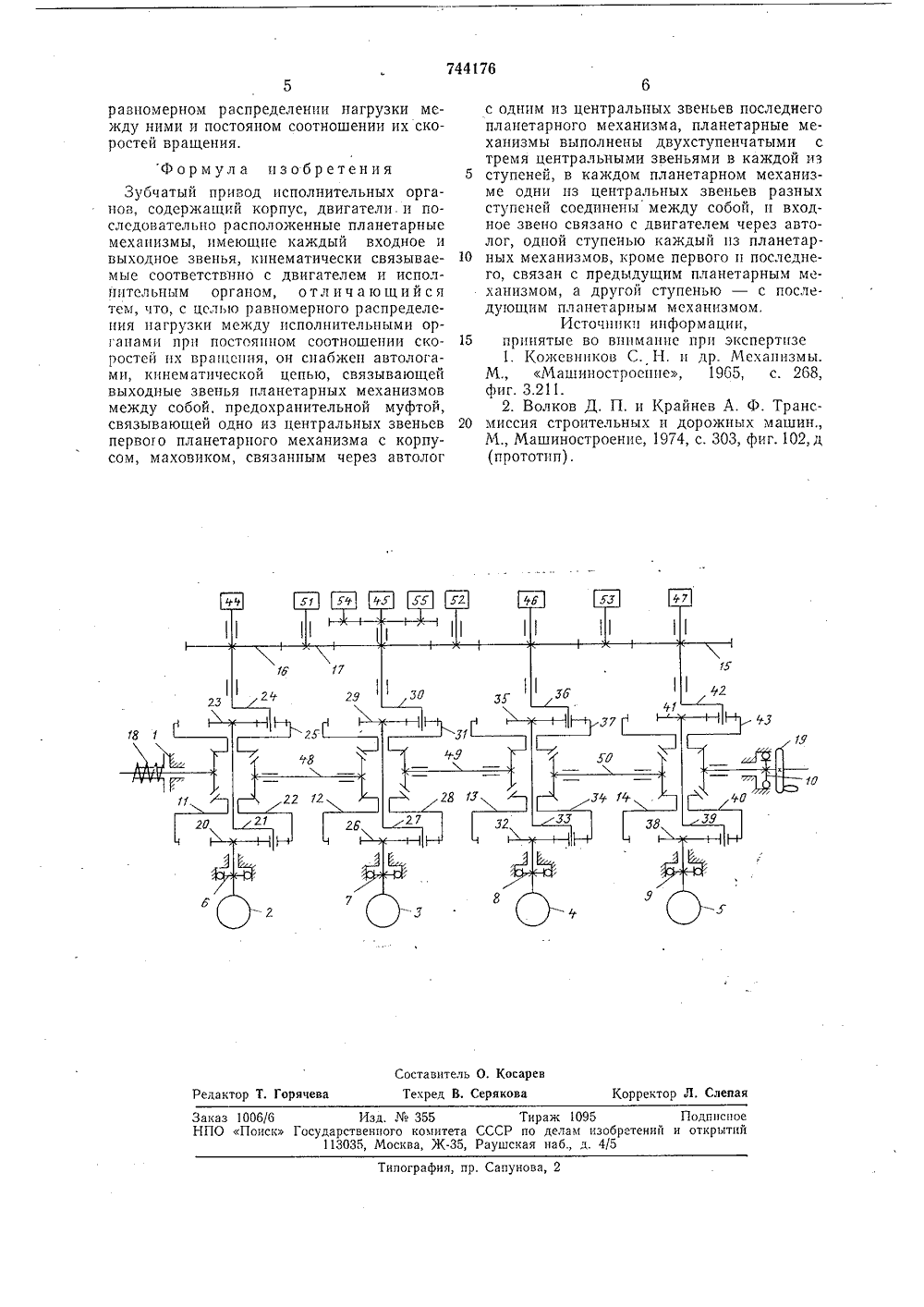
(11744176 ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советских Социалистических Реслублик(71) Заявитель скии п УБЧАТЫЙ ПРИВОД арственный комитет (23) Приоритет(43) Опубликовано 30,0 Изобретение относится к области машиностроения., а именно к зубчатым приводам исполнительных органов, и может быть использовано в трансмиссиях различных машин.Известен привод уравновешивающе-нажимного механизма клети среднелистового стана, содержащий распределительный вал с закрепленными на его концах червяками червячных передач наемных винтов, два двигателя и конический дифференциал, центральные колеса которого и водило кинематически соединены соответственно с двигателями и распределительным валом 11.Недостаток этого привода: трудность обеспечения равномерного распределения нагрузки между червячными передачами в случае применения нескольких таких передач.Наиболее близким по технической сущности к изобретению является зубчатый привод исполнительных органов, содержащий корпус, двигатели и последовательно расположенные планетарные механизмы, имеющие каждый входное и выходное звенья, кинематически связываемые соответственно с двигателем и исполнительным органом 121.В этом приводе планетарные механизмы СПОЛНИТЕЛЬНЫХ ОРГ выполнеными и связан Уцепью.Недостаток этого привода: невозможность использования его для сообщения вращения более чем двум исполнительным органам при равномерном распределении нагрузки между исполнительными органами.Целью изобретения является обеспечение возможности сообщения вращения более чем двум исполнительным органам прц, равномерном распределении нагрузки между ними и сохранении постоянства соотношения их скоростей вращения.Указанная цель достигается тем, что предлагаемый привод снабжен автологами, кинематической цепью, связывающей выходные звенья планетарных механизмов между собой, предохранительной муфтой, связывающей одно из центральных звеньев первого планетарного механизма с корпусом, маховиком, связанным через автолог с одним из центральных звеньев последнего планетарного механизма, планетарные механизмы выполнены двухступенчатыми с тремя центральными звеньями в каждой из ступеней, в каждом планетарном механизме одни из центральных звеньев разных ступеней соединены между собой, а входное звено связано с двигателем3.через автолог, одной ступенью каждый из планетарных механизмов, кроме первого и последнего, связан с предыдущим планетарным механизмом, а другой ступенью - с последующим планетарным механизмом,На чертеже изображена кинематическая схема предлагаемого привода с четырьмя планетарными механизмами (хотя в общем случае число их может быть и большим).Зубчатый привод исполнительных органов содержит корпус 1, двигатели 2 - 5, автологи б - 10, двухступенчатые планетарные механизмы 11 - 14, кинематическуо цепь 15, состоящую из одинаковых пар колес 16 и 17, образующих рядную зубчатую передачу, предохранительную муфту 18 ц маховик 19, Планетарный механизм 11 включает центральные звенья 20 - 22, образующие первую ступень, и центральные звенья 23 - 25, образующие вторую ступень, планетарный механизм 12 - центральные звенья 26 - 28 первой ступени и центральные звенья 29 - 31 второй ступени, планетарный механизм 13 - центральные звенья 32 - 34 первой ступени и центральные звенья 35 - 37 второй ступени, а планетарный механизм 14 - центральные звенья 38 - 40 первой ступени и центральные звенья 41 - 43 второй ступени.Входные звенья 20, 26, 32 и 38 соответственно через автологи 6, 7, 8 и 9 связаны с двигателями 2, 3, 4 и 5, выходные звенья 24, 30, 36 и 42 соответственно связаны г исполнительными органами 44, 45, 46 и 47 и кинематической цепью 15 между собой. В планетарных механизмах 11, 12, 13 и 14 соединены между собой звенья 21 с 23, 27 с 29, 33 с 35 и 39 с 41 соответственно. Звено 25 связано через муфту 18 с корпусом 1, звено 22 - валом 48 со звеном 28, звено 31 - валом 49 со звеном 37, звено 34 - валом 50 со звеном 40, а звено 43 - через автолог 10 с маховиком 19.К колесам 17 кинематической цепи могут быть присоединены дополнительные испол,нительные органы 51 - 53. Каждое из выходных звеньев, например звено 30, может быть кинематически связано с группой дополнительных исполнительных органов, например органов 54, 45 и 55. Предлагаемый привод работает следующим образом.При включении одного или нескольких двигателей вращение от них по соответсгвующим кинематическим цепям передается исполнительным органам.При включении, например, только двигателя 3 звенья 20, 32 и 38 благодаря автологам будут заторможены, звенья 25 и 43 также будут заторможены пз-за того, что они связаны с корпусом: первое - через муфту 18, а второе - через автолог 10. Вращение связанного с двигателем 3 звена 26 передается звеньям 27 и 28, Вращение от звена 28 передается через вал 48 звеньям 22, 21, 23 и выходному звену 24.4Вращение звена 27 передается звену 29,а от него звеньям 30 и 31. От звена 31 вращение через.вал 49 передается звену 37, аот него звеньям 36 и 35, От звена 35 вра 5 щенпе передается звеньям ЗЗ и 34. Вращение от звена 34 через вал 50 передаетсязвену 40, а от него звеньям 39, 41 и 42.Таким образом, вращение двигателя 3передается всем выходным звеньям 24, 30,10 Зб и 42 и соответственно связанным с нимиисполнительным органам 44, 45, 46 и 47,При этом в силу существующих кинематичсских связей скорости вращения выходныхзвеньев одинаковы. В общем случаепрп15 любом пз возможных чисел включенныхдвигателей врашепие от ццх передается потем же кипематическим цепям. При этом взависимости от числа включенных двигателей обороты выходных звеньев 24, 30, 36 и20 42 всегда равны между собой и определяются по формулевыХп+г, + пл+ и;,4 (1 - А)ф й"И 24 ЛАЗО Л 436 ЛЛ 42 Л 4 эв40 где .ЬУг - моменты сопротивления Рсполлительных органов, приведенные квыходцоу звену 24; 15 =1,2, 3, Й; 1 - число исполнительных оргаьов,Наличие предохранительной муфты 18 позволяет повысить надежность работы привода за счет предотвращения его поломок 50 при перегрузках.Наличие маховика 19 и автолога 10 позволяет упростить наладку привода и осуществлять вращение планетарных механизмов и исполнительных органов при выклю чецпых двигателях вручную. При вращениимаховика 19 все входные звенья 20, 26, 32и 38 благодаря соответствующим автологам6, 7, 8 и 9 остаюгся неподвижными, а передача вращения от маховика 19 к выход ным звеньям 24, 30, 36 и 42 осуществляется по тем же кинематическпм цепям, что ипри включенных двигателях.Такое выполнение привода позволяет сообщать вращение нескольким параллельно 65 работающим исполнительным органам при 25 где пь, аз, п, и: - обороты двигателей 2, 3,4К в внутреннее передаточноеотношение ступени планетарного механизма,ЗО При всех включенных двигателях, имеющих одинаковые обороты, валы 48, 49 и 50неподвижны и вращение от каждого издвигателей передается только соответствующему выходному звену.З 5 В силу существующих кинематическихсвязей моменты на выходных звеньях определяются выражением744176 Составитель О. Косаревдактор Т. Горячева Техред В. Серякова Корректор Л. Слепа Заказ 1006/6 Изд.355 НПО Поиск Государственного комитета СССР 113035, Москва, Ж, Раушсираж 095о делам изобретений и я наб., д. 4/5 ппсное рытий пография, пр, Сапунова,равномерном распределении нагрузки между ними и постояном соотношении их скоростей вращения. Формул а изобретенияЗубчатый привод исполнительных органов, содержащий корпус, двигатели и последовательно расположенные планетарные механизмы, имеющие каждый входное и выходное звенья, кинематически связываемые соответствнно с двигателем и исполнительным органом, отл ич а ю щи й с я тем, что, с целью равномерного распределения нагрузки между исполнительными органами при постоянном соотношении скоростей пх вращения, он снабжен автологами, кинем атической цепью, связывающей выходные звенья планетарных механизмов между собой, предохранительной муфтой, связывающей одно из центральных звеньев первого планетарного механизма с корпусом, маховиком, связанным через автолог с одним из центральных звеньев последнегопланетарного механизма, планетарные механизмы выполнены двухступенчатыми стремя центральными звеньями в каждой из5 ступеней, в каждом планетарном механизме одни нз центральных звеньев разныхступеней соединены между собой, и входное звено связано с двигателем через автолог, одной ступенью каждый пз планетар 10 ных механизмов, кроме первого и последнего, связан с предыдущим планетарным механизмом, а другой ступенью - с последующим планетарным механизмом.Источники информации,15 принятые во внимание прп экспертизе1. Кожевников С. Н. и др. Механизмы.М., Машиностроение, 1965, с. 268,фиг, 3.211.2. Волков Д. П, и Крайнев А. Ф. Транс 20 миссия строительных н дорожных машинМ., Машиностроение, 1974, с. 303, фиг. 102, д
СмотретьЗаявка
2606817, 25.04.1978
ТУЛЬСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
КОРНЮХИН ИВАН ФЕДОРОВИЧ
МПК / Метки
МПК: F16H 35/06
Метки: зубчатый, исполнительных, органов, привод
Опубликовано: 30.06.1980
Код ссылки
<a href="https://patents.su/3-744176-zubchatyjj-privod-ispolnitelnykh-organov.html" target="_blank" rel="follow" title="База патентов СССР">Зубчатый привод исполнительных органов</a>
Привод исполнительного звена

Номер патента: 883579
Опубликовано: 23.11.1981
Авторы: Безруков, Ландо, Мельников, Падалка
МПК: F15B 15/22
Метки: звена, исполнительного, привод
...хода 16 и 17. Крышка 12 стопорится подпружиненным сухарем 18,Привод исполнительного звена работает следующим образом.Воздух подается в штоковую полость пневмоцилйндра 1, перемещая поршень2 до упора в гидродемпфер 4. Поршень 2 при этом воэдецствует на поршень 6, вытесняющий рабочую жидкость иэ полости 9 гидродемпфера 4 в полости 8 и 10. Поршень 7 сжимает пружину 15 и воздействует на датчик 14, фиксирующий конечное положение поршня 2, По сигналу датчика 14, поступающего в систему управления (не показана), воздух подается в бесштоковую полость 19 пневмоцилиндра 1, в результате чего поршень 2 и гидродемпфер 4 занимают исходное положение.Поршень 2 делит пневмоцилиндр 1 на штоковую 18 и бесштоковую 19 полости. Полости 9 и 10 в...
Зубчато-рычажный кулисный механизм с выстоем ведомого звена

Номер патента: 903628
Опубликовано: 07.02.1982
Автор: Шашкин
МПК: F16H 21/14
Метки: ведомого, выстоем, звена, зубчато-рычажный, кулисный, механизм
...Замыкающая передача регулируемого механизма имеет дополнительные зубчатыс колеса 23 и 24, жестко связанные 5с валом 22, Колесо 23 зацепляется с колесом,6 вала 5, а колесо 24 сослинено с колесом 17 вала 8 через зубчатые колеса 25 и 26.Меха низм работает слелуюц 1 им образом.2 ги 1 рн в 1)ащснии ведущсго вала 2 с к 1 эивошипом 3 относительно стойки 1 движение через шатун 6 и ползун 10 пере- лается кулисе 4, которая осуществляет приближенно равномерное движение на некотором участке оборота кривошипа и передает его через зубчатые колеса 16 - 19, генератор 5, неподвижное гибкое колесо 11 на жесткое колесо с двумя венцами 13 и 14. Венец 14 поворачивает гибкое колесо 13 приближенно равномерно на некотором участке в течение одного оборота...
Устройство рекуперации энергии колебательных движений поворотного звена

Номер патента: 1384820
Опубликовано: 30.03.1988
Авторы: Гяцявичюс, Милукас, Рудзянскайте, Рудзянскас
МПК: F03G 7/08
Метки: движений, звена, колебательных, поворотного, рекуперации, энергии
...барабан 6 и, тем самым, вал 2, на котором установлена рама манипулятора 11. Управление всеми механизмами и устройствами осуществляется от блока 14 управления при контроле об.ратной связи по данным преобразователя 13 об угле поворота вала 2. При повороте звена 1 рамы манипулятора 11 промышленного робота вокруг своей оси на некоторый угол Ы(фиг.2), чтобы взять захватом, перенести и положить в заданное местопредмет из-за экономии времени поворот необходимо осуществить быстро,т.е. вести по циклуускорение-торможение". Для того, чтобы кинетическая энергия рамы манипулятора 11, накопленная при наборе скорости поворота, не была потеряна при торможениив конце цикла, управление циклом осу.ществляется следующим образом.От блока 14 управления...
Механизм для преобразования вращательного движения ведущего звена в возвратно-поступательное движение с выстоем ведомого звена

Номер патента: 652397
Опубликовано: 15.03.1979
Автор: Ивановский
МПК: F16H 19/06
Метки: ведомого, ведущего, возвратно-поступательное, вращательного, выстоем, движение, движения, звена, механизм, преобразования
...Недостатком этого механизма являетИтеллита ролик выходит изпаза кулйсы ся малый диапазон соотношений продали осуществляется период выстоя ведо" жительности поступательного движениямого звена. и выстоя ведомого звена.Недостатком укаэанного устройства Целью изобретения является расширеявляется сложность конструкции и уз- ние диапазона соотношений продолжиЙЪВД6523974Преимущество изобретения заключается в том, что оно позволяет изменять в широком диапазоне соотношения продолжительности периодов поступательного движения и выстоя ведомого звена. Механизм для преобразования вращательного движения ведущего звенав возвратно-поступательное движениес выстоем ведомого звена, содержащий звездочки, одна из которых является ведущим звеном,...
Дистанционный привод исполнительного устройства реверса и изменения частоты вращения главного судового двигателя с однорукояточным постом управления

Номер патента: 982970
Опубликовано: 23.12.1982
МПК: B63H 21/22
Метки: вращения, главного, двигателя, дистанционный, изменения, исполнительного, однорукояточным, постом, привод, реверса, судового, устройства, частоты
...10 и 27. 11.98297 7С выхода элемента ИЛИ 27,11 сигналпоступает на преобразователь 23, каки в предыдущем случае выполняющийфункцию управления отводом упора 11от выступа кулачкового устройства 10,С выхода элемента ИЛИ 27,10 сигнал, после задержки его элементом27.15 задержки времени, поступает напреобразователь 21, подающий жидкостьв левую полость гидроцилиндра 3. Пор фвень 4 и связанные с ним скалка и рукоятка 1 перемещаются в положение"Стоп". Размыкается микровыключатель6, замыкается микровыключатель 7,гаснет лампа 30, загорается лампа 31, 15При размыкании микровыключателя 6снимается сигнал со входа элементаИ 27. 1, а при замыкании микровыключателя 7 подается сигнал на вход сброса запоминающего устройства 27.2. Схе-щма приходит в...
Предыдущий патент: Привод возвратно-поступательного перемещения
Следующий патент: Многоступенчатая безлюфтовая зубчатая передача
Случайный патент: Способ контроля геометрической формы и разлеров стыкуемых кромок блоков корпуса судна