Устройство для записи программы управления промышленным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
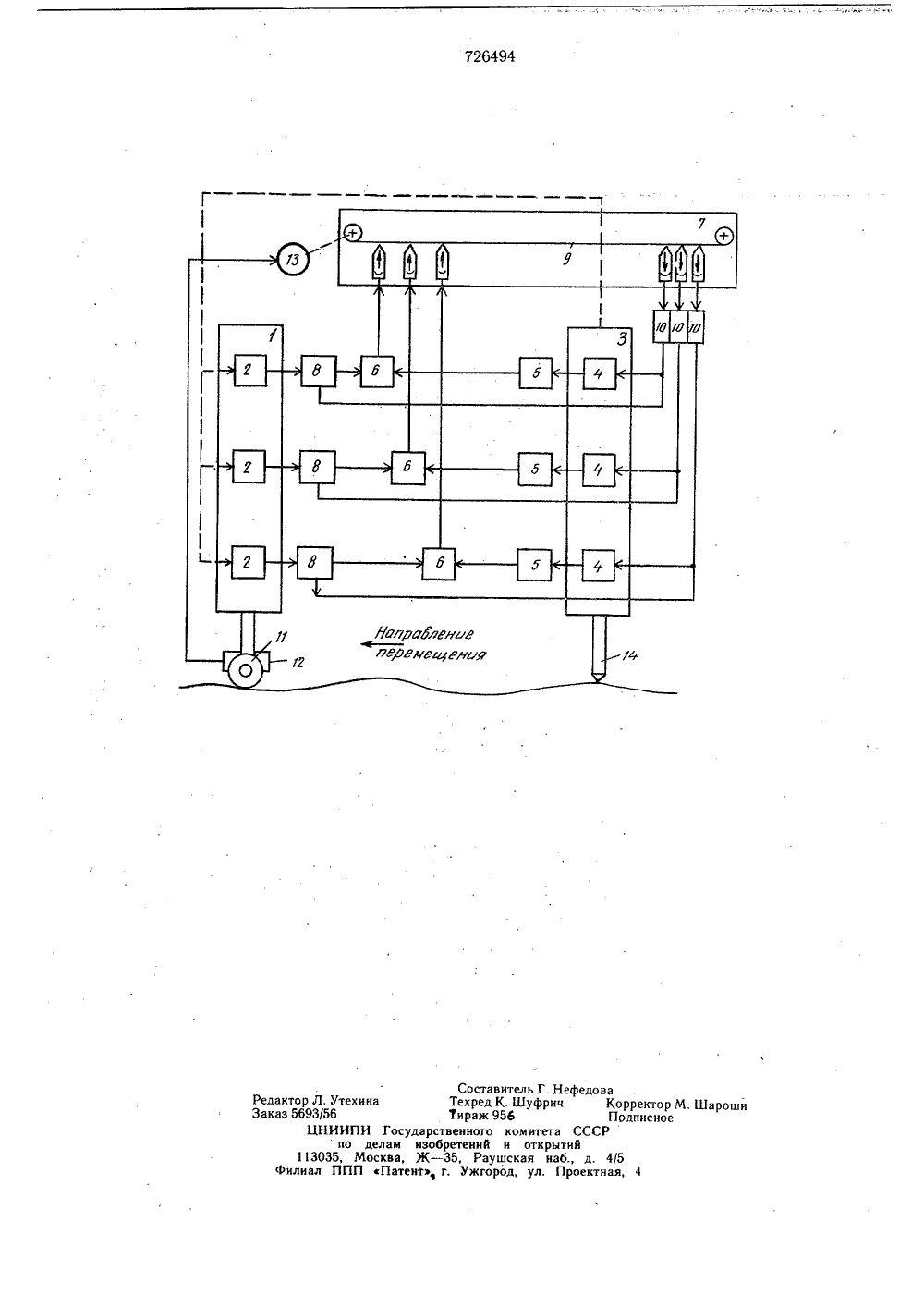
На чертеже представлена функциональная схема устройства для записи программы управления промышленным роботом.Схема содержит рукоятки 1 обучения,датчики 2 положения рукоятки обучения, исполнительный орган 3, приводы 4, датчики 5 положения исполнительного органа, сумматоры 6, блок 7 памяти, первые ключи 8, программоноситель 9, вторые ключи 10, копирующий ролик 11, датчик 12 перемещения рукоятки обучения, привод 13 программносителя"и рабочий орган 14.10Устройство работает следующим образом.Оператор по ведущей координате, величина перемещения по которой на данном чис""ле программы максимальна, коммутируетипервым ключом 8 первый его выход, а вторым ключом 10 вход привода 4.По остальным координатам первыми ключами 8 скоммутированы его вторые входы, а вторые ключи будут в разомкнутом состоянии. Затем оператор прижимает копирую о щий ролик 11 к изделию и, направляя ролик 11 вдоль заданной траектории, вручную перемещает рукояткув требуемом направлении.Смещение рукоятки 1 от нулевого положения приводит к появлению сигнала на выходе датчиков 2 положения рукоятки 1.Одновременно вращение за счет сил трениякачения копирующего ролика 11 приводит к перемещению программоносителя 9, поскольку на привод программоносителя 13 будут поступать сигналы датчика перемещения рукоятки обучения 12 ролика 11. Сигналы датчика 2 положения рукоятки 1 по ведущей координате поступают на вход соответствующего привода 4 исполнительного органа 3 робота и черездатчик положения 5и сумматор 6 в блок памяти 7.Исполнительный орган 3 робота по ведушей координате перемещается, а сигнал датчика положения 5 записывается на йрограммоносйтель 9; Сигналы датчиков по-ложения 2 по остальным координатам записываются в блок памяти 7. После прохож- дения рабочим органом 14 по ведущей координате расстояния до начального положения копирующего ролика 11 на выходахблока памяти появятся сигналы отклонения датчиков положения 2, По ведущей координате эти сигналы не поступают на привод 4 из-за того, что второй ключ 10 по данной координате разомкнут, Подругим коордийатам" указанные сигналы через замкнутые вторые ключи 10 поступят на приводы 4, и исполнительный орган 3 робота будет воспроизводить отклонения рукоятки 1 от нулевого положения, зарегистрированные датчиками положения 2. Поскольку рукоятка 1 связана с исполнительным органом 3 робота через датчики положения 2, то при воспроизведении исполнительным органом 3 робота записанных на программоноситель 9 сигналов на датчики 2 исполнительным органом 3 будет оказываться дополнительное воздействие, Это воздействие будет вызываться воспроизводящим перемещением исполнительного органа 3 робота, а не действием оператора.Однако записи сигналов датчиков положения 2, вызванных воспроизводящим отклонением исполнительного органа 3, не произойдет, поскольку эти сигналы с датчиков положения 2 и с датчиков положения 5 алгебраически складываются в сумматоре 6. С выхода сумматора 6 в блок памяти 7 будут поступать, таким образом, только сигналы отклонения рукоятки 1 от первоначального положения.В результате исполнительный орган 3 робота с рабочим органом 14 будет воспроизводить перемещение рукоятки 1 с запаздыванием, т. е, будет осуществляться следящее копирование рабочим органом 14 заданной траектории вслед за рукояткой 1. Связь датчика перемещения 12 копирующего ролика 11 с приводом программоносителя 13 позволяет производить запись в произвольном масштабе времени.Применение изобретения позволит осуществлять запись программы управления промышленным роботом, перемещающимся по траектории, имеющей участки значительной кривизны.Формула изобретенияУстройство для записи программы управления роботом, содержащее датчик перемещения рукоятки обучения, выход которого соединен с входом привода программоносителя, связанного с блоком памяти,и по каждой регулируемой координате -датчик положения рукоятки обучения, связанный с исполнительным органом робота,и последовательно соединенные привод, датчик положения исполнительного органаи сумматор, выход которого подключен ксоответствующему входу блока памяти, отличаюи 1 ееся тем, что, с целью расширенияфункциональных возможностей устройства,оно содержит по каждой регулируемой координате первый ключ и второй ключ, входкоторого соединен с соответствующим выходом блока памяти, а выход - с входомпривода и первым выходом блока памяти,а выход - с входом привода и первым выходом первого ключа, второй выход которого подключен ко второму входу сумматора, а вход - к выходу датчика положениярукоятки обучения.Источники информации,принятые во внимание при экспертизе1, Журнал Автоматическая сварка,1976,9, с, 60 - 61,2 Авторское свидетельство СССР по заявке2363565/24, кл. В 25 Л 9/00, 1976и Редактор Л. УтехиЗаказ 5693/56ЦНИИПпо113035, МФилиал ППП Составитель Г. Техред К. Шуфр Тираж 956 твенного комитет бретений и откр- 35, Раушская н г. Ужгород, ул.Нефедоваич Корректор М. ШарошиПодписноеа СССРытийаб., д. 4/5Проектная, 4 Госуда лам из сква, ЖПатент
СмотретьЗаявка
2533197, 07.10.1977
КИЕВСКИЙ ИНСТИТУТ АВТОМАТИКИ ИМ. ХХУ СЪЕЗДА КПСС, ОРДЕНА ЛЕНИНА И ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ИНСТИТУТ ЭЛЕКТРОСВАРКИ ИМ. ПАТОНА
СЕРГАЦКИЙ ГЕОРГИЙ ИВАНОВИЧ, ЛИНКИН ГЕННАДИЙ АНДРЕЕВИЧ
МПК / Метки
МПК: G05B 11/01
Метки: записи, программы, промышленным, роботом
Опубликовано: 05.04.1980
Код ссылки
<a href="https://patents.su/3-726494-ustrojjstvo-dlya-zapisi-programmy-upravleniya-promyshlennym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для записи программы управления промышленным роботом</a>
Устройство для ориентации исходного положения узлов памяти

Номер патента: 270802
Опубликовано: 01.01.1970
Авторы: Государственный, Захарченко, Нечитаев, Ронин, Синицын, Сисенков
МПК: H03K 17/54
Метки: исходного, ориентации, памяти, положения, узлов
...конденсатора С запирается транзистор 3 и открывается транзистор 4. Такое состояние транзисторов 3 и 4 сохраняется до отключения и последующего включения питания, и нулевой сигнал выхода Д транзистора 4 не оказывает влияния на работу узла памяти. изобретен едь Устроиство для ориентации исходного поло кения узлов памяп 1, содержащее два по:ледо вательно соединенные инвертора с положи 1Предлагаемое устройство относится к области автоматического управления и может применяться в системах управления приводамидля прокатных механизмов с большой частотой включения. 5Известны устройства для ориентации исходного положения узлов памяти, содержащиедва инвертора с обратной положительной связью. Известные устройства обладают ненадежностью работ,...
Автоматизированная система для определения координат положения пчелиной матки

Номер патента: 2004152
Опубликовано: 15.12.1993
МПК: A01K 57/00
Метки: автоматизированная, координат, матки, положения, пчелиной
...признак присутствия матки отсутствует при просмотре всех рамок, то эту операцию повторяют в другое время (поз.11, 13, 15, 16). При отсутствии матки выдается информация отсутствия (поз.14).Если признак присутствия матки имеется (поз.5), то просматривают следующую рамку (поз.7) и вновь анализируют признак присутствия матки (поз.8). При отсутствии признака присутствия формируется рисунок предыдущей рамки с координатами пчелиной матки, а так ке аксонометрический рисунок с местом ее нахождения (поз.9,12). В автоматическом режиме просмотра (поз.4) ЭВМ 1 самостоятельно определяет номер рамки, где находится матка, и выводит на экран дисплея ее рисунок с номером (поз.9).ЭВМ 1 может так же по запросу оператора (пчеловода) вывести на экран...
Пневматический блок долговременной памяти дискретных сигналов

Номер патента: 168543
Опубликовано: 01.01.1965
Авторы: Голованова, Научно, Федосеев
МПК: G06D 1/02, G11C 23/00, G11C 25/00
Метки: блок, дискретных, долговременной, памяти, пневматический, сигналов
...11 в шайбе 4, с боковым каналом 12 выхода и с каналом 13 питания через отверстия в шайбе 5. Канал 14 соединяет камеру 15, образованную крышкой 2 и мембраной 16, с входным давлением. Канал 17 соединяет камеру 18, образованную крышкой 3 и мембраной 19, с сигналом команды,В мембрану 16 упирается под действиемпружины 20 конец вертикального исполнительного механизма, а в мембрану 19 упирается конец горизонтального исполнительного механизма под действием пружины 21. На5 штоке б вертикального исполнительного механизма сделаны две канавки 22, а на што.ке 7 сделан выступ 23.При отсутствии давлений в каналах 14 иО 17, давление питания прижимает мембрану10 к кромкам отверстия 11, перекрывая выход в атмосферу. Канал 13 через камеру 9 иканал...
Устройство памяти импульсных сигналов

Номер патента: 499676
Опубликовано: 15.01.1976
Авторы: Арбенин, Виницкий, Шейман
МПК: G11C 19/00
Метки: импульсных, памяти, сигналов
...которых подключены к выходу расширителя 10. Выход бланк-каскада 8 соединен с выходом 13, а выход строб-каскада 11 соеди нен с первым входом элемента 5, второй входкоторого подключен к входу 2, третий вход - к выходу бланк-каскада 9, а выход - через линию 7 к сигнальному входу бланк-каскада 9, управляющий вход которого подсоединен к 30 входу 3. Выход линии 7 соединен с входомЗаказ 449/20ЦНИИП Изд.2127 т осударственного комитета Совпо делам изобретений и отк 3035, Москва, Ж, Раушская аж 1029а Министров ССытийаб., д. 4(5 одписн ипография, пр. Сапунова,коммутатора 12, первый выход которого подключен к другому входу элемента 4, а второй к выходу 14.Устройство работает следующим образом.На входы 1 и 2 поступают опорный и контрольный...
Устройство для управления очувствленным роботом

Номер патента: 954921
Опубликовано: 30.08.1982
МПК: G05B 11/00
Метки: очувствленным, роботом
...импульс определенной длительности, который подается на второй элемента И 16 и разрешает прохождение импульсов с выхода приемника 3 чувствительного элемента 1 на вход сцетчика О импульсов. Длительность импульса Формирователя 6 определяет постоянную времени, в тецение которого будет поступать информация с приемника З,.которая дает значение высоты предмета в данной точке измерения.Источник 2 радиоактивного излучения излуцает кванты ионизирующего излучения, которые, отразившись от поверхности или от предмета регистрируются приемником 3 излучения, Последний преобразует кванты излуцения в электрические импульсы, которые формируются в приемнике 3 по длительности и амплитуде и подаются через элемент И 16 на счетчик 8. Количество импульсов,...
Предыдущий патент: Устройство для измерения поверхностной плотности трибоэлектрического заряда электрографического тонера
Следующий патент: Устройство для регулирования натяжения свежесформованной нити
Случайный патент: Устройство для контроля широкополосного усилителя