Круговой интерполятор для контурных систем программного управления станками
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 499556
Авторы: Бреслав, Томашевская, Фельдман
Текст
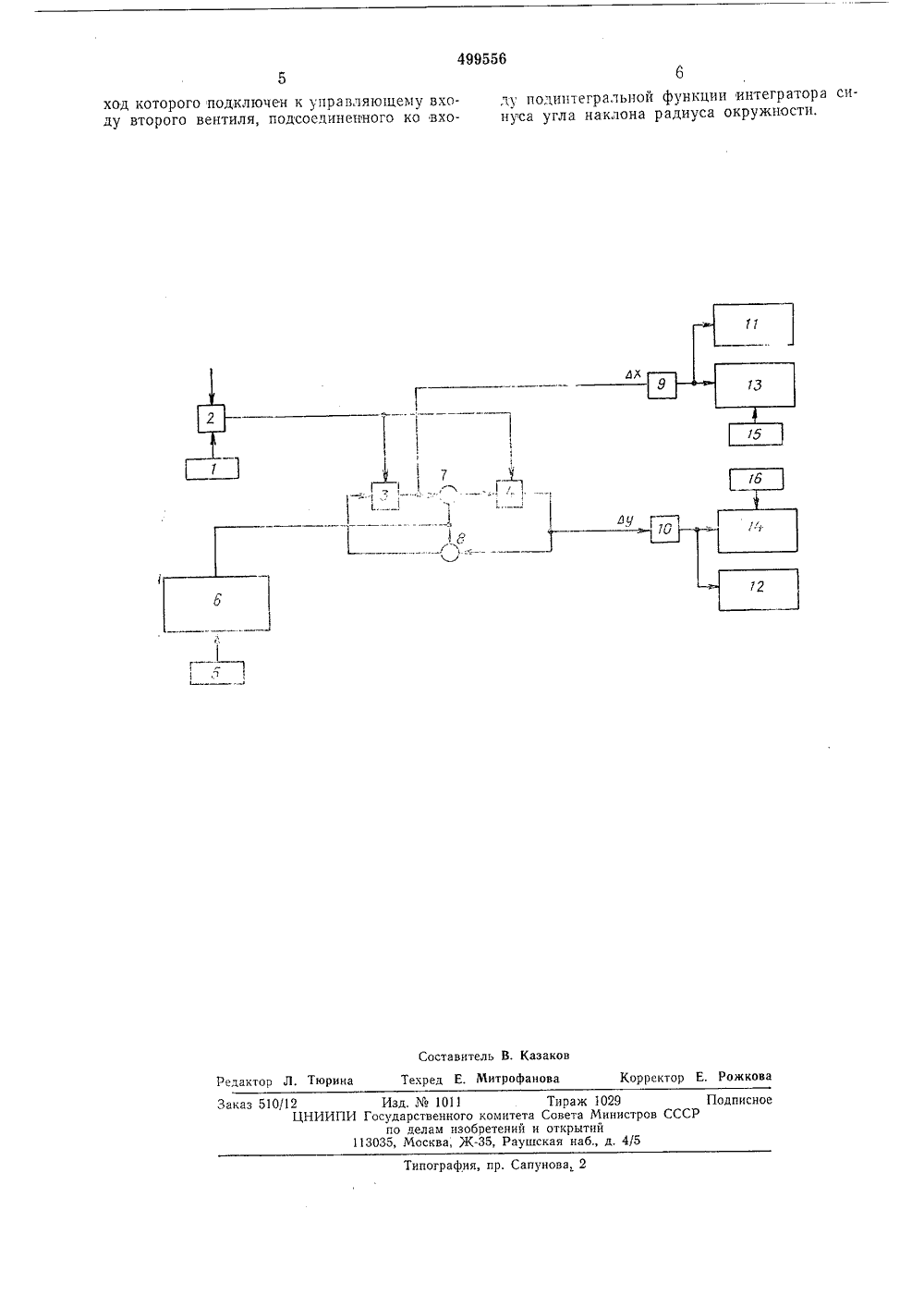
Щумбибпиот;знг, МБА ОПИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ 111 499556 Союз Советских Социалистических(22) Заявлено 24,07.73 (21) 1949952/18-2 51) М. Кл,2 С 05 В 19/18 присоединением заявкиГосударственный комитет Совета Министров СССР 3) итетОпубликовано 15,01.76. Бюллетень2 Дата опубликования описания 29.03.76 па делам нзобретени н открытий(72) Авторы изобретения 3. Бреслав,(71) Заявнтел ОВОЙ ИНТЕРПОЛЯТОР ДЛЯ КОНТУРНЫХ СИСТЕПРОГРАММНОГО УПРАВЛЕНИЯ СТАНКАМИ 4) Изобретение относится к автоматическому управлению и предназначено для использования в контурных системах программного управления станками.Известен круговой интерполятор для контурных систем программного управления станками, содержащий интегратор линейной скорости, ко входу подинтегральной функции которого подключен выход регистра программируемой линейной скорости, а выход соединен со входами независимой переменной интеграторов синуса и косинуса угла наклона радиуса окружности, выходы которых через накопители координатных приращений подключены к соответствующим схемам управления приводами и схемам окончания интерполирования, соединенным с регистрами конечных значений координат, а также регистр программируемого радиуса.Отличие описываемого интерполятора состоит в том, что он содержит схему определения величины дискреты подынтегр альных функций и два вентиля, причем кодовые входы вентилей соединены с выходами схемы определения величины дискреты подинтегральных функций, ко входу которой подключен регистр программируемого радиуса, управляющий вход первого вентиля соединен с выходом интегратора синуса угла наклона радиуса окружности, а выход - со входом Томагневская и А. В. фельдма подинтегральнои функции интегратора косинуса угла наклона радиуса окружности, выход которого подключен к управляющему входу второго вентиля, подсоединенного ко вхо 5 ду подинтегральной функции интегратора синуса угла наклона радиуса окружности. Этопозволяет повысить точность и быстродействие работы интерполятора,На чертеже показана функциональная схе 10 ма описываемого интерполятора.Она содержит регистр программируемойлинейной скорости 1, интегратор линейнойскорости 2, интеграторы синуса и косинусаугла наклона радиуса окружности 3 и 4, ре 15 гистр программируемого радиуса 5, схемуопределения величины дискреты подинтегральных функций 6, вентили 7 и 8, накопители координатных приращений 9 и 10 схемыуправления приводами 11 и 12, схемы окон 20 чания интерполирования 13 н 14 и регистрыконечных значений координат 15 и 16. Принепосредственном программировании линейной скорости (программируется не угловаяскорость, а линейная), чтобы обеспечить по 25 стоянство задания линейной скорости на малых радиусах, необходимо увеличивать угловую скорость обратно пропорционально радиусу, Если не увеличивать угловую скорость,т, е. обрабатывать дуги большого и малого30 круга с одинаковой угловой скоростью, то ду10 20 35 40 45 50 55 60 65 ги различных радиусов и равных центральныхуглов будут отрабатываться за одинаковоевремя. При этом линейная скорость при движении по дуге малого круга окажется меньше, чем при движении по дуге большего круга,В предлагаемой схеме увеличение угловойскорости при малых радиусах достигаетсяувеличением цены дискреты т интеграторов 3и 4. При этом объем Я интеграторов 3 и 4 берется равным максимально возможному программируемому радиусу Р. Цена дискретыполучается в предыдущем кадре при помощисхемы 6 в соответствии с формулой т=С/Р,При отработке дуги максимального радиуСа Рмакс,=Я, т= =1 ВРЕМЯ ОТРабоТКИ1 максзаданной дуги определяется временем получения величин Лз 1 п(а - а) и Лсоз (ак - а), соответствующих заданным конечным значениям хк и у (ак - конечное значение отрабатываемого центрального угла, ак - начальноезначение).Очевидно, что при отработке дуг различных радиусов с одним центральным углом веЛИЧИНЫ ЛЗ 1 П(ак - ад) И ДСОЗ(ак - ад) ОДИНаковы, При неизменной частоте на входе интерполятора увеличить угловую частоту можно, увеличивая дискрету интерполятора об(ратно пропорционально радиусу т= - , где1 сР; - любой возможный запрограммированныйрадиус. При этом время отработки 1=Т И,где Т - период частоты ,к интерполятора,У, - количество импульсов на входе интерполятора, При увеличении дискреты интерполятора в раз для отработки тех же знаема кс1 счений ЛВ 1 п(ак - а,) и асов(ак - а,) на входеинтерполятора потребуется в меньше1 симпульсов, Следовательно, при одной и тойже частоте 1 кк вРемЯ отРаботки 1 в " Разуменьшается, что приведет к увеличению в тоже число раз угловой скорости.Количество импульсов на выходе интерполятора при этом также в раз умень 1 макс1 ашается, т. е. предлагаемая схема позволяетсократить количество оборудования в известной схеме интерполятора, а именно в даннойсхеме не требуется умножителей з 1 пы 1 Я исозыв Л. Текущие значения приращений Лх иЬу получаются сразу на выходе интеграторов3 и 4. Действительно, если при отработке дуГи с Д=Ямккс на Выходе интегратоРОВ 3 и 4было выдано М и Уг импульсов, то при отработке дуги радиуса Я; на выходы интеграторов 3 и 4 будет выдано в -раз меньшеейУР 1 а%количество импульсови, т. е. при1 макс 1 максуказанном значении дискреты интеграторы 3 и 1, помимо функции Вычисления эп ю 1 и соз М выполняют также функцию умножения на радиус Р 1В кадре, предшествующем кадру, в котором данная дуга отрабатывается, величина радиуса Л с выхода регистра 5 поступает на вход схемы 6. Схема 6 определяет величину дискреты т интеграторов 3 и 4 в соответствии с формулой и= - . В кадре, в котором отраЯЯбатывается данная дуга, величина дискреты т в виде числа поступает на кодовый вход вентилей 7 и 8, на управляющие входы которых приходит сигнал переполнения регистров- накопителей интеграторов 3 и 4. При наличии импульса переполнения на выходе интегратора 3 (4) содержимое регистра подинтегральной функции интегратора 4 (3) изменяется на величину т. Скорость суммирования подинтегральной функции интеграторов 3 и 4 определяется частотой, которая получается на выходе интегратора 2 в результате интегрирования величины линейной скорости О, Импульсы текущих приращений Лх и Лу поступают на входы накопителей 9 и 10, где накапливаются текущие значения х и у. Текущие приращения х и у поступают в схему управления, приводом, а также в схему окончания интерполирования по координате, где величина х (у) сравнивается с конечным запрограммированным значением приращения по координате, которое хранится в регистре 15 (16),Формула изобретения Круговой интерполятор для контурных систем программного управления станками, содержащий интегратор линейной скорости, ко входу подинтегральной функции которого подключен выход регистра программируемой линейной скорости, а выход соединен со входами независимой переменной интеграторов синуса и косинуса угла наклона радиуса окружности, выходы которых через накопители коОрдинатных приращений подключены к соответствующим схемам управления приводами и схемам окончания интерполирования, соединенным с регистрами конечных значений координат, а также регистр программируемого радиуса, отличающийся тем, что, с целью повышения точности и быстродействия работы интерполятора, он содержит схему определения величины дискреты подинтегральных функций и два вентиля, причем кодовые входы вентилей соединены с выходами схемы определения величины дискреты подинтегральных функций, ко входу которой подключен регистр программируемого радиуса, управляющий вход первого вентиля соединен с выходом интегратора синуса угла наклона радиуса окружности, а выход - со входом подинтегральной функции интегратора косинуса угла наклона радиуса окружности, вы(Х Составитель В, Казаков Текред Е, Митрофанова Редактор Л. Тюрина Корректор Е, Рожкова Заказ 510/12 Изд1011 Тираж 1029 Подписное ЦНИИПИ Государственного комитета Совета Министров СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д. 4/5Типография, пр. Сапунова, 2 ход которого подключен к управляющему входу второго вентиля, подсоединенного ко входу подинтегральной функции интегратора синуса угла наклона радиуса окружности,
СмотретьЗаявка
1949952, 24.07.1973
ПРЕДПРИЯТИЕ ПЯ М-5774
БРЕСЛАВ ИЗРАИЛЬ ЗАЛМАНОВИЧ, ТОМАШЕВСКАЯ ИРИНА НИКОЛАЕВНА, ФЕЛЬДМАН АЛЕКСАНДР ВЕНИАМИНОВИЧ
МПК / Метки
МПК: G05B 19/4103
Метки: интерполятор, контурных, круговой, программного, систем, станками
Опубликовано: 15.01.1976
Код ссылки
<a href="https://patents.su/3-499556-krugovojj-interpolyator-dlya-konturnykh-sistem-programmnogo-upravleniya-stankami.html" target="_blank" rel="follow" title="База патентов СССР">Круговой интерполятор для контурных систем программного управления станками</a>
Прибор для определения абсолютной скорости самолета, его компасного курса и угла сноса

Номер патента: 4106
Опубликовано: 30.11.1927
Автор: Закуринов
МПК: G01C 21/20
Метки: абсолютной, компасного, курса, прибор, самолета, скорости, сноса, угла
...одинаковый линейный мас-штаб, - возможно для этих величини направлений построить общуюкруговую таблицу (сетку), изобра-женную на фиг. 5, где Р соответ-ствует Кл, р соответствует Кв и концентрические окружности являютсямасштабными делениями, проведенными через каждые 5 лл.Максимум Р=30 л,с; максимум(случаи попутного ветра).Величина Г, (фиг. 1) есть радиус окружности, которым произведена засечка на направлении Ллдля определения К Следовательно, ,если на прозрачную пластинку нанести окружность радиусом равнымУ, (бО л, с) в двойном масштабе и ,наложить центр этой окружностив точку а, то, соединив точки а и бполучим тот же треугольник скоро-стей, что и на фиг, 1, только в умень-шенном вдвое масштабе (фиг. 8).Очевидно, подобное...
Измеритель скорости и угла поворота вала

Номер патента: 832479
Опубликовано: 23.05.1981
Авторы: Кутафин, Полевой, Сидорин
МПК: G01P 3/36
Метки: вала, измеритель, поворота, скорости, угла
...света, корпус 16 измерителя и блок 17 обработки информации.Двигатель 1 установлен соосцоконтролируемому валу 9, а прозрачнаяпластина б установлена между барабанами 2 и 10 в плоскости, перпендикулярной оси вращения. Две пары отражателей 4, 5 и 11, 12, установленные в барабанах 2 и 10, образуют две 20одинаковые встречно направленные от-.ражающие оптические системз. Отражатель 4 в барабане 2 закреплен так,что центр его отражающей плоскостинаходится на оси вращения и плосокость его расположена под углом 45 коси вращения. Центр отражателя 5. размещен на определенном радиальномудалении от центра отражателя 4 так,чтобы его плоскость отражения быларасположена под углом 90 О к плоскости отражателя 4. Расположение отражателей 11 и 12 в барабане...
Устройство для измерения скорости и угла рыскания транспортного средства

Номер патента: 1635143
Опубликовано: 15.03.1991
Авторы: Бачурин, Ещин, Заровский, Пантелеев
МПК: G01P 3/64
Метки: рыскания, скорости, средства, транспортного, угла
...2(3) поступает на два входа соответствующего блока 4 определения временной задержки. В каждом блоке 4 определения временной задержки в корреляторе 5 производится вычисление взаимной корреляционной функции Й по формуле 1В (т) = - ( х 1 (г) х 2 (т т) си, (2)где Т - врегля наблюдения,т, - время задержки сигнала хф) в 1-йрегулируемой линии задержки, управляемой -ым регулятором, при котором величина й достигает своего максимального значения.При этом производится непрерывно 40 подстройка регулятором 6 блока 1 регулирования временной задержки так, что на выходе корреллятора 5 поддерживается максимально возможная для данной пары сигналов величина В; (т).45Для и-го блока 4 определения временной задержки (вследствие выполнения условия (1) для...
Измеритель воздушной скорости и угла скольжения летательного аппарата
Номер патента: 589817
Опубликовано: 30.03.1994
Авторы: Перевощиков, Порунов, Ференец
МПК: G01P 5/00
Метки: аппарата, воздушной, измеритель, летательного, скольжения, скорости, угла
ИЗМЕРИТЕЛЬ ВОЗДУШНОЙ СКОРОСТИ И УГЛА СКОЛЬЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА , содеpжащий пpиемники динамического напоpа, pадиально установленные на вpащающейся платфоpме, жестко связанной с генеpатоpом опоpного электpического сигнала, подключенным на пеpвый вход усилителя, упpавляемым pегулятоpом амплитуды, фазосдвигающей схемой, подключенной к выходам неупpавляемого и фазочувствительного выпpямителей чеpез усилитель и электpонно-измеpительную схему включения стpуйных анемочувствительных элементов, подключенную также на втоpой вход усилителя, отличающийся тем, что, с целью pасшиpения диапазона измеpения, повышения точности и эксплуатационной надежности, в платфоpме выполнена камеpа с пpиемным отвеpстием условно-статического давления,...
Измеритель скорости и угла скольжения летательного аппарата
Номер патента: 801712
Опубликовано: 30.03.1994
Авторы: Бельфор, Захарова, Минькашева, Порунов
МПК: G01P 5/08
Метки: аппарата, измеритель, летательного, скольжения, скорости, угла
ИЗМЕРИТЕЛЬ СКОРОСТИ И УГЛА СКОЛЬЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА , содеpжащий пpиемники динамического напоpа, связанные с пpиемными отвеpстиями условно-статистического давления чеpез пневматические каналы, сообщающие стpуйные пневмочувствительные элементы с пpиемниками динамического напоpа с диффеpенциально включенными стpуйными анемочувствительными элементами теpмоанемометpа, а также усилитель, выпpямители, генеpатоp опоpного сигнала и источник питания, отличающийся тем, что, с целью повышения точности, в него дополнительно введены два электpопневмоклапана, установленные в пневматических каналах, блок памяти, блок фоpмиpования коppектиpующего напpяжения, функциональный генеpатоp импульсов и коммутатоp, пpи этом выход усилителя связан с входом...
Предыдущий патент: Линейный интерполятор для цифровых двухкоординатных систем програмного управления
Следующий патент: Устройство для определения параметров динамических звеньев систем автоматического регулирования
Случайный патент: Мельница для тонкого измельчения