Способ демпфирования вынужденных систем регулированияколебаний
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
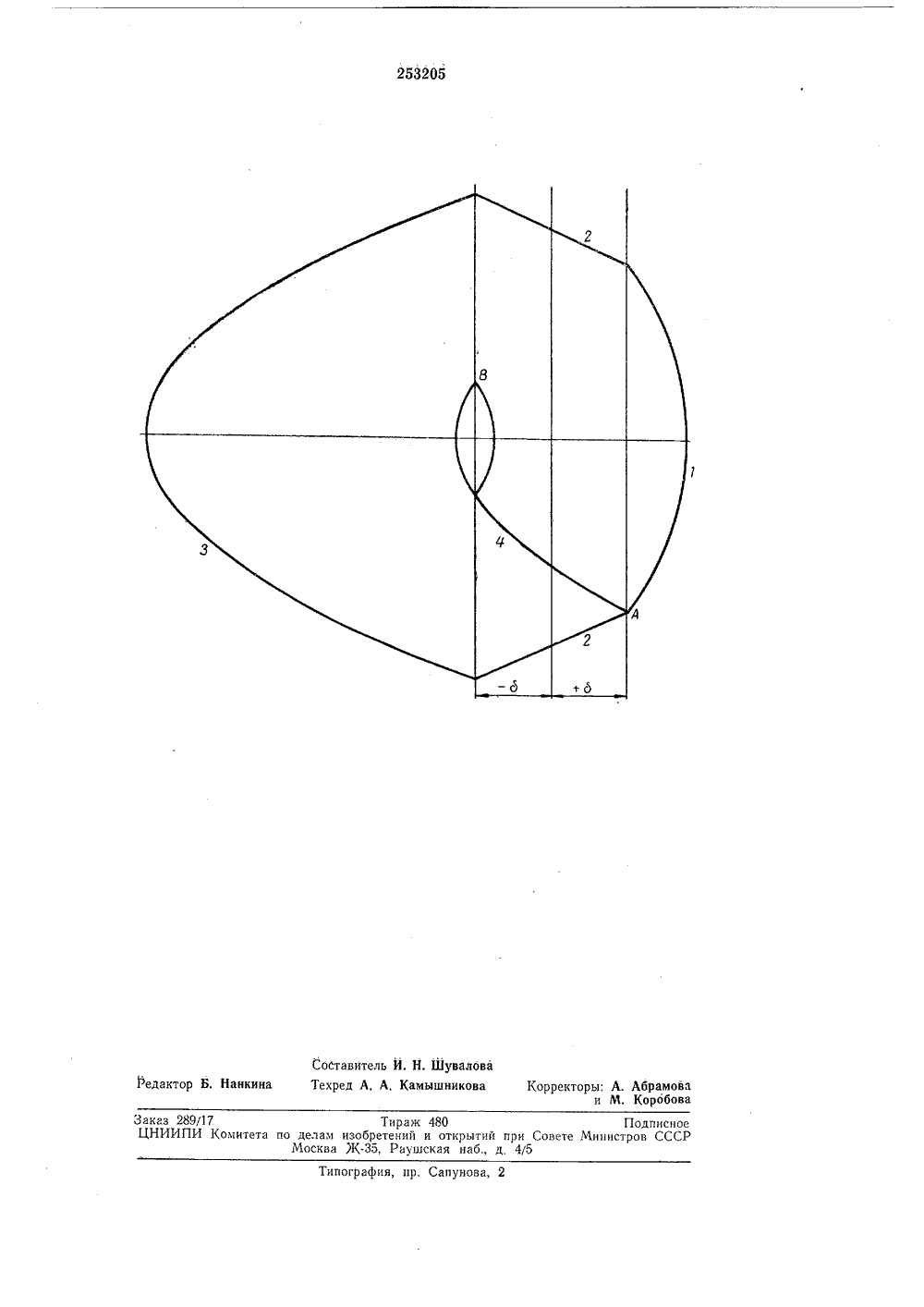
Восоюз: ."япй:;.лг,о -,хпич о.с 1 я био огя ж 0 Союз Советскик Социалистически Республиквисимое от авт. свидетельстваКл, 21 с, 46 1247723/18-24 Заявлено 13.Ч 1,196 с присоединением заявкиПриоритетОпубликовано 30,1 Х.1969. Бюллетень3Дата опубликования описания 23,1 Ъ.1970 Козтитет пс асламизоорвтвний и открытийпри Совете МинистровСССР Авторыизобретен. С. Черешкин и В, А. Есако отехиический институ аявител осковски СПО МПФИРОВАН СИСТЕМВЪ 1 НУЖДЕННЪ УЛИРОВАНИЯ ОЛЕБАНИИ замкнутая система регулирования из объекта регулирования, измериустройства, усилителя-преобразоватеюлнительного двигателя, имеющего о характеристику.еренциальное уравнение движения регулирования имеет вид Пусть состоит тельного ля и ис релейнуДифф объекта т (1ение объекта регули Ю: Ил10 где: ср - угловое отклорования от заданного; тнв -1Ф и объек егулиромент инер вания;- движущно двумя Л 4, Мл аздел ями; Мв щий м В зазмущаю- постоянно деиствующииомент,висимости от управляющееля (сигнал У ) момент,елем, будет равен: о сигнала с развиваемый силит вигат Это обеавтоколебаными релевами и погельных уции о скодаты. печиваений в с йными вышени стройств рости дв т уменьшение а истеме с двумя н исполнительнымиэкономичности при отсутствии ижеиия выходно мплитудыереверсивустр ойстисполниинформа. и коордиМпри У )ООприУ =ОМ,при У(Остройство имеет+6. При этом зона зону,н,нечувс Измерительное0 чувствительности Изобретение относм автоматического регу и систем стабилизации.Известные способы демпфирования вынужденных колебаний систем регулирования, в которых для управления амплитудой автоколебаний используют сигналы, пропорциональные скорости движения выходной координаты, неэффективны в условиях отсутствия информации о скорости.Предложенный способ отличается от извест,ных тем, что при нем измеряют раздельно длительность полуцикла автоколебания каждого исполнительного устройства, преобразуют результаты измерения в электрические сигналы, сравнивают эти сигналы и в соответствии со знаком разпостного сигнала на границе зо. ны чувствительности дополнительно включают двигатель с большой длительностью полуцикла и выключают двигатель при достижении выходной координатой противоположной границы зоны нечувствительности. МПК 6 051УДК 621.3.078-752 (088.8 моменты, создаваемые реверсивными двигате35 40 45 50 вительности двигателя меньше зоны нечувствительности измерительного устройства, и ее множно не учитывать.Измерительное устройство выдает сигнал Уу, пропорциональный угловому отклонению объекта от заданного: Кпри )+ оО при - о (в (+б (3) - Кпри р( - о,где К - крутизна измерительного устройства,Усилитель-преобразователь усиливает сигнал, поступающий с измерительного устройства, и преобразует его в форму, необходимую для управления двигателем:У, = К, К (4) где К - коэффициент передачи усилителя- преобразователя.Уравнения (1) - (4), описывающие движение замкнутой системы, можно свести к виду:щ: гггд - ггг при ( - опри - о (р (+д= - (ог, + ггг,) при )о По полученной системе уравнений (5) можно построить фазовый портрет системы.Фазовый портрет (см, чертеж) представляет собой семейство замкнутых фазовыхтраекторий типа центр; в системе имеетсябесчисленное множество периодических движений, определяемых, начальными условиями.Фазовая траектория состоит из трех участков,Как только угловое отклонение объекта отзаданногс станет больше величины зоны нечувствительности р)6, включается двигатель,создающий момент на уменьшение угловогоотклонения (участок 1). При ср(б двигательвыключается, и объект движется под действием возмущающего момента (участок 2).В момент времени, когда ( - б, двигательсоздает момент противоположного знакавозвращая объект к заданному положению (участок 3). Таким образом, устанавливается колебательный режим с поочередным включением двигателя в одну или другую сторону.Пусть гри некоторых начальных условияхо о(у=Хо и =Х=У, в системе возникают автоколебания. При постоянно действующем моменте М, время работы двигателя в одну сто 5 10 15 20 25 30 рону будет меньше, чем в другую. Измеряя время работы двигателя в одну и другую стороны за един полный цикл и сравнивая эти времена, получают косвенную оценку направления возмущающего момента М, и информацию для изменения параметров имеющегося пределвного цикла. Если двигатель .на участке 1 работает большее время, чем на участке 2, то, преобразовав полученную разность времен в электрический сигнал, по его знаку подают команду,на включение двигателя на участке 2 (который обычно включается при значении сигнала Х( - о) при значении Л.=б, т. е, в тот момент, когда производится отключение двигателя на участке 1 (точка Л). Отклонение объекта от заданного положения уменьшается, так как происходит парирование возмущающего момента в зоне нечувствительности, что прежде не обеспечивалось (участок 4).В момент времени, когда Х - б, двигатель отключаегся (точка В), и объект движется под действием возмущающего момента, причем угловое отклонение не превышает величины Х=б, т. е. включения двигателя на работу в противоположном направлении не происходит.Таким образом, в системе устанавливается новый предельный цикл с включением только одного двигателя, Параметры предельного цикла можно свести к допустимым соответствующим выбором величин движущих моментов Ми коэффициентов передачи системы. Предмет изобретенияСпособ демпфирования вынужденных колебаний систем регулирования, отличающийся тем, что, с целью уменьшения амплитуды автоколебаний в системе с двумя нереверсивными репейными исполнительными устройствами и повышения экономичности исполнительных устройств при отсутствии информации о скорости движения выходной координаты, измеряют, раздельно длительность полу- цикла автоколебания каждого исполнительного устройства, преобразуют результаты измерения в электрические сигналы, сравнивают эти сигналы и в соответствии со знаком раз,ностного сигнала на границе зоны чувствительности дополнительно включают двигатель с большей длительностью полуцикла и выключают двигатель при достижении выходной координатой противоположной границы зоны нечувствительности.Заказ 2891 ЦНИИПИ Тираж 480 митета по делам изобретений и открытий при Совете Москва К, Раушская наб., д, 4/5
СмотретьЗаявка
1247723
Д. С. Черешкин, В. А. Есаков Московский лесотехнический институт
МПК / Метки
МПК: G05B 11/16
Метки: вынужденных, демпфирования, регулированияколебаний, систем
Опубликовано: 01.01.1969
Код ссылки
<a href="https://patents.su/3-253205-sposob-dempfirovaniya-vynuzhdennykh-sistem-regulirovaniyakolebanijj.html" target="_blank" rel="follow" title="База патентов СССР">Способ демпфирования вынужденных систем регулированияколебаний</a>
Устройство для регулирования зоны нечувствительности управляющей системьи-•сгаоозная”••-iimmm. •i-; cthka

Номер патента: 288440
Опубликовано: 01.01.1970
Автор: Эпштейн
МПК: G05B 11/01
Метки: cthka, i••, зоны, нечувствительности, системьи-•сгаоозная"••-iimmm, управляющей
...величины, включены таким образом, что создаваемые ими магнитные потоки ф, взаимоедмет изоб ения отоками Фсмещениякением,другом вреброскав случае,магнитреле 1поляризо ания зоны неей системы по еся тем что, с сти работы, в смещения поля- дополнительный последовательно омежуточных редействуя с магнитными и даваемыми обмотками 4 мыми постоянным напря реле суммируются, а в При таком включении пе в реле происходит только марный (алгебраически больше потока трогания ему. При этом контакт 6 ле 2 неподвижен,сози питаев одном из ычитаются.контакта 5 когда сумный поток или равен ванного реПри замыкании контакта 5 промежуточное реле 7 размыкает свой и, з. контакт и в цепь обмоток смещения 4 вводится добавочный резистор 8, шунтированный...
Устройство передачи сигналов по двухпроводной линии связи

Номер патента: 1061266
Опубликовано: 15.12.1983
Авторы: Баканов, Колбеченков, Трубин, Тютюнюк, Хаиров, Чулин
МПК: H04B 3/00
Метки: двухпроводной, линии, передачи, связи, сигналов
...В противном случае, передается информация об обрыве линии связи.Цель изобретения - увеличение количества передаваемых сигналов.Для достижения поставленной цели в устройство передачи сигналов по двухпроводной линии связи, содержащее на передающей стороне первый и второй контактные датчики, первые контакты которых соединены между собой, а также первый диод, анод которого соединен с катодом второго диода, причем катод первого диода соединен с вторым контактом первого контактного датчика, а анод второго диода соединен с вторым контактом второго контактного датчика,;а на приемной стороне источник питания, первое и второе реле, первые входы которых соединены между собой, а также третий диод, анод которого соединен с катодом четвертого диода,...
Устройство для проверки системы зажигания двигателя внутреннего сгорания

Номер патента: 1249188
Опубликовано: 07.08.1986
Автор: Отставнов
МПК: F02P 17/00
Метки: внутреннего, двигателя, зажигания, проверки, сгорания, системы
...десятичного счетчика 30 импульсов, Он позволяет задавать значения чисел от нуля до девяти.Схема 32 сравнения служит для выдачи на ее выходе сигнала в случае совпадения числа, заданного с помощью задающего элемента 31, с числом, отсчитанным десятичным счетчиком 30 импульсов. Она выполнена в виде дели теля напряжения, на выходе которого установлен электронный усилитель.3Устройство для проверки системы зажигания двигателя внутреннего сгорания работает следующим образом.(на примере четырехцилиндрового двигателя и проверки вторичного напряжения всех цилиндров последовательно в масштабе 15 кВ).С помощью спецгзльных присоедини- тельных проводов устройство подключают к контактам прерывателя, распределителя, к катушке зажигания и све-че...
Устройство для моделирования системы охлаждения двигателя внутреннего сгорания

Номер патента: 1287202
Опубликовано: 30.01.1987
МПК: G06G 7/64
Метки: внутреннего, двигателя, моделирования, охлаждения, сгорания, системы
...изменяя дискретнона управляющих входах ограничителей13 и 28 величину напряжений, на выходах интеграторов 14, 29 можно получать различные напряжения, пропорциональные температуре окружающейСреды,задана переключателем 30.Напряжение Бт, с выхода интегратора 14 поступает на вхо" сумматора19. На его другой вход поступает напряжение Пт, , пропорциональное температуре охлаждающей жидкости в радиаторе (в данный момент оно соответствует температуре окружающей среды),В результате на выходе сумматора 19появляется напряжение П, пропорциональное количеству тепла, отводимогоот двигателя,Это напряжение через резистор 21 (коммутатор 22 при незапущенном двигателе отключен) и усилитель 25 поступает на вход интегратора 29, заряжая его, При этом на выходе...
Устройство для проверки системы зажигания двигателя внутреннего сгорания

Номер патента: 1318719
Опубликовано: 23.06.1987
Автор: Отставнов
МПК: F02P 17/08
Метки: внутреннего, двигателя, зажигания, проверки, сгорания, системы
...и перебрасывают его в состояние 1. При этом на его выходе выделяется сигнал, который поступает на вход триггера 24 и также переводит его в состояние 1, в результате чего элементы 27 и 28 совпадения открываются. Одновременно с этим импульс положительной полярности с выхода формирователя 21 импульсов, соответствующий моменту начала разрядного процесса в свече зажигания первого цилиндра двигателя, проходит через открытый элемент 27 совпадения и перебрасывает триггер 25 в противоположное состояние. Элемент 29 совпадения открывается, в результате чего импульсы с выхода генератора 30 импульсов времени поступают на вход блока 34 делителей частоты импульсов, который начинает производить деление частоты этих импульсов на число 4. Импульсы с...
Предыдущий патент: 253204
Следующий патент: Устройство для получения иапряжений,
Случайный патент: Цифровое устройство для спектральных преобразований