Установка для экспериментального определения параметров следящих систем
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
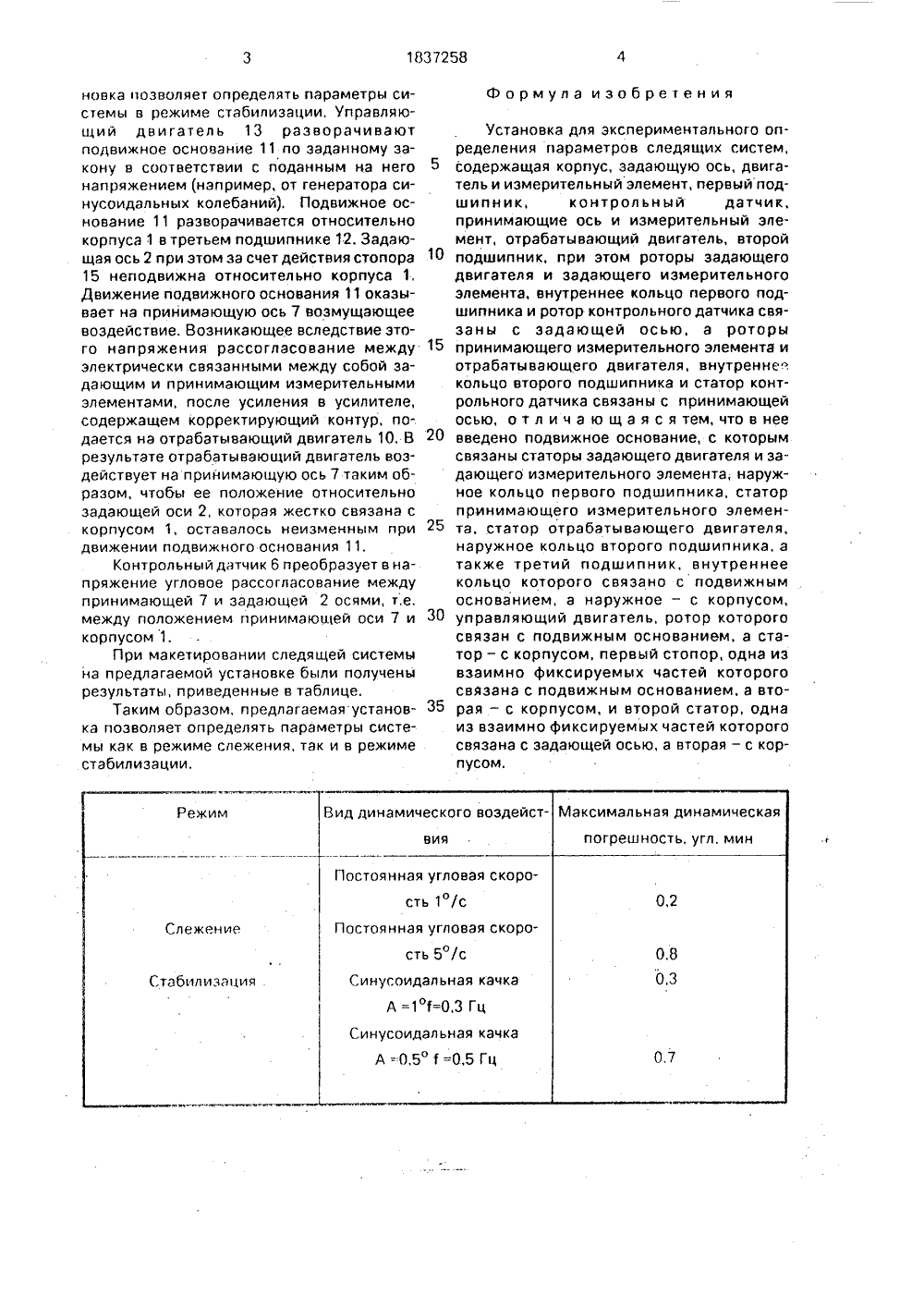
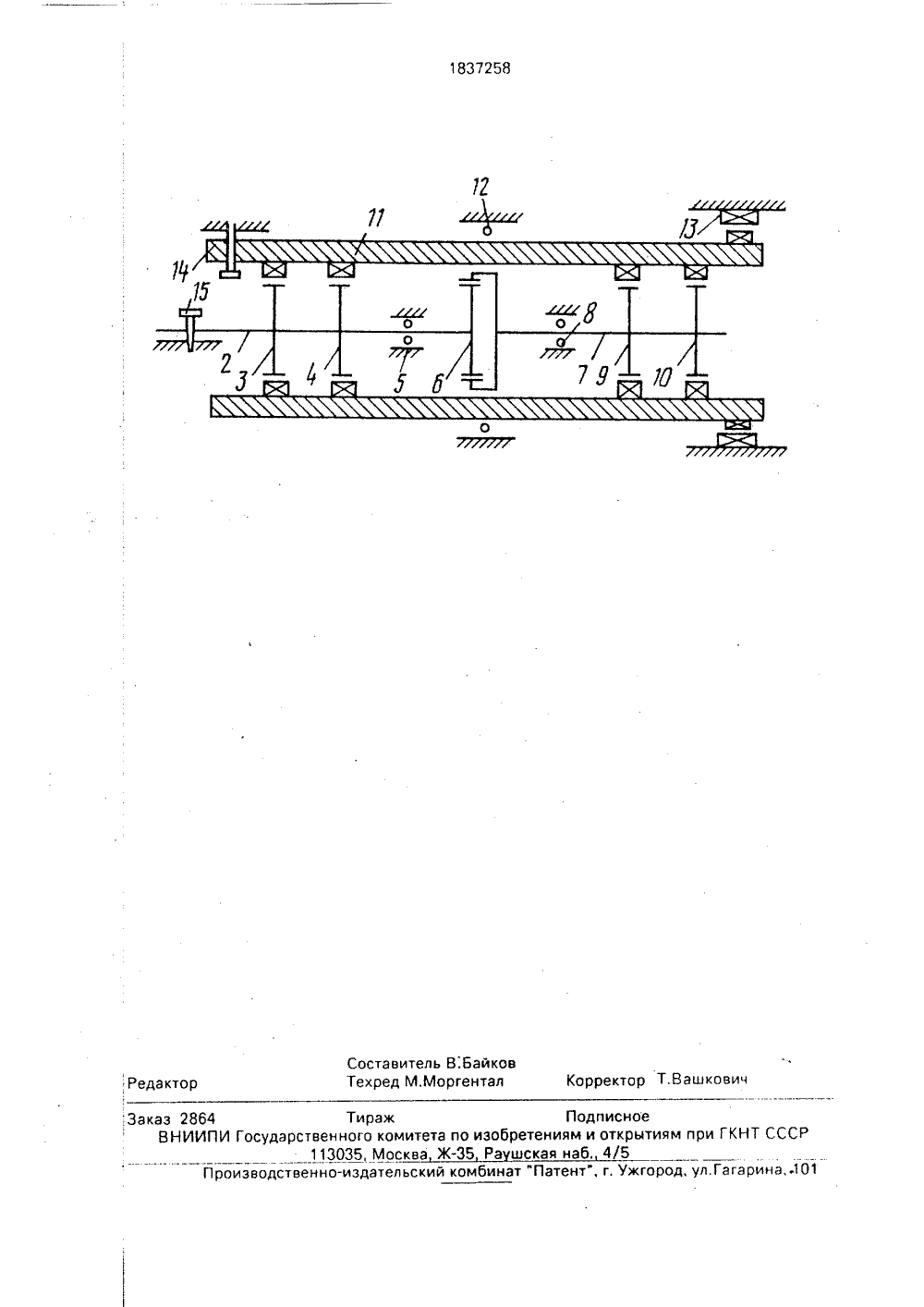
. Пи.) Г САНИЕ ИЗОБРЕТЕНИ т элект еханики еров 1 сокоточнтоматиче 5, с. 262. 1 е систеких уст 54) УСТАНОВКА ДЛЯНОГО ОПРЕДЕЛЕНИВЯЩИХ СИСТЕМ СПЕРИАРАМ ЕТ НТАЛЬОВ СЛЕте м 3.При застопоресстопоренном стопоре 15 ре 14 устаом вто рвом сГОСУДАРСТВЕННОЕ ПАТЕНТНО(ГОСПАТЕНТ СССР АВТОРСКОМУ СВИДЕТЕЛЬСТВУ 1 21) 4769276/24 1,22) 12,12,89 46) 30,08.93, Бюл. М. 32 1,71) Московский институ )автоматики (72) В,В. Байков и Е.Д. С 56) Ахметжанов А.А, В ы передачи угла ав ойств, М,; Энергия, 197Там же, с. 263. Изобретение относится к области приборостроения и может быть использовано для экспериментального определения пара,метров следящих систем в режиме слежения, когда требуется отрабатыватьизменяющееся во времени управляющее воздействие и в режиме стабилизации, когда необходимо обеспечить неизменное по(ложение выходной оси системы в условиях воздействия возмущающих факторов,Цель изобретения - расширение функци(ональных возможностей установки для определения параметров следящих систем за ,счет обеспечения определения динамиче,ских параметров как в режиме слежения, ,так и в режиме стабилизации, когда задачей системы является поддержание неизменно.го положения выходной оси при воздейст;вии возмущающих факторов, вызванных динамическими движениями основания,На чертеже показана кинематическая 1,;схема предлагаемой установки, где 1 - корпус; 2 - задающая ось, 3 - задающий двига(57) Установка для экспериментального определения параметров следящих систем относится к области приборостроения и может быть использована для экспериментального определения параметров следящих систем. Цель изобретения обеспечение определения параметров следящих систем в режиме стабилизации. Установка содержит корпус, задающую ось, двигатель, измерительный элемент, два подшипника, контрольный датчик, принимающие ось 7 и измерительный элемент, отрабатывающий двигатель, подвижное основание,третий подшипник, управляющий двигатель и два стопора. 1 ил., 1 табл. тель,4 - задающий измерительный элемент, 5 - первый подшипник. 6 - контрольный датчик, 7 - принимающая ось, 8 - второй подшипник, 9 - принимающий измерительный элемент, 10 - отрабатывающий двигатель, 11 - подвижное основание, 12-третий подшипник, 13 - управляющий двигатель, 14,15 - первый и второй стопоры.При застопоренном первом стопоре 14 и расстопоренном втором стопоре подвижное основание 11 жестко связано с корпусом 1, а задающая ось 2 может свободно проворачиваться относительно подвижного основания,т:е. относительно корпуса, Работа предлагаемой установки полностью аналогична работе установки принятой в качестве прототипа, При этом может проверяться качество слежения принимающей оси 7 за задающей осью 2, разворачиваемой по определенному закону задающим двига1837258 Формула изобре ения Установка для экспериментального определения параметров следящих систем, содержащая корпус, задающую ось, двигатель и измерительный элемент, первый подшипник, контрольный датчик, принимающие ось и измерительный элемент, отрабатывающий двигатель, второй "0 подшипник, при этом роторы задающегодвигателя и задающего измерительного элемента, внутреннее кольцо первого подшипника и ротор контрольного датчика связаны с задающей осью, а роторы 15 принимающего измерительного элемента иотрабатывающего двигателя, внутреннекольцо второго подшипника и статор контрольного датчика связаны с принимающей осью, о т л и ч а ю щ а я с я тем, что в нее 20 введено подвижное основание, с которымсвязаны статоры задающего двигателя и задающего измерительного элемента; наружное кольцо первого подшипника, статор принимающего измерительного элемен та, статор отрабатывающего двигателя,наружное кольцо второго подшипника, а также третий подшипник, внутреннее кольцо которого связано с подвижным основанием, а наружное - с корпусом, 30 управляющий двигатель, ротор которогосвязан с подвижным основанием, а статор - с корпусом, первый стопор, одна из взаимно фиксируемых частей которого связана с подвижным основанием, а вто рая - с корпусом, и второй статор, однаиз взаимно фиксируемых частей которого связана с задающей осью, а вторая - с корпусом. Режим Вид динамического воздействия Постоянная угловая скорость 1 О/с0,2 Постоянная угловая скорость 5 /слежен ие 0,8 0,3 Синусоидальная качка А =11=0,3 ГцСинусоидальная качка А =0,5 1 =0,5 Гц билизэция 0.7 новка позволяет определять параметры системы в режиме стабилизации. Управляющий двигатель 13 разворачивают подвижное основание 11 по заданному закону в соответствии с поданным на него напряжением (например, от генератора синусоидальных колебаний). Подвижное основание 11 разворачивается относительно корпуса 1 в третьем подшипнике 12. Задающая ось 2 при этом за счет действия стопора 15 неподвижна относительно корпуса 1, Движение подвижного основания 11 оказывает на принимающую ось 7 возмущающее воздействие. Возникающее вследствие этого напряжения рассогласование между электрически связанными между собой задающим и принимающим измерительными элементами, после усиления в усилителе, содержащем корректирующий контур, подается на отрабатывающий двигатель 10. В результате отрабатывающий двигатель воздействует на принимающую ось 7 таким образом, чтобы ее положение относительно задающей оси 2, которая жестко связана с корпусом 1, оставалось неизменным при движении подвижного основания 11.Контрольный датчик б преобразует в напряжение угловое рассогласование между принимающей 7 и задающей 2 осями, т,е. между положением принимающей оси 7 и корпусом 1.При макетировании следящей системы на предлагаемой установке были получены результаты, приведенные в таблице.Таким образом, предлагаемая установка позволяет определять параметры системы как в режиме слежения, так и в режиме стабилизации. Максимальная динамическая погрешность, угл. мин:Редак Т Подписноеретениям и открытиям при ГКНТ СССшская наб. 4/5 т "Патент", г. Ужгород, ул,Гагарина, 10 Произв Заказ В64ИПИ Г арственного комитета по изо 113035, Москва ЖРа ственно-издательский комби
СмотретьЗаявка
4769276, 12.12.1989
МОСКОВСКИЙ ИНСТИТУТ ЭЛЕКТРОМЕХАНИКИ И АВТОМАТИКИ
БАЙКОВ ВЛАДИМИР ВЛАДИМИРОВИЧ, СЕРОВ ЕВГЕНИЙ ДМИТРИЕВИЧ
МПК / Метки
МПК: G05B 23/00
Метки: параметров, систем, следящих, экспериментального
Опубликовано: 30.08.1993
Код ссылки
<a href="https://patents.su/3-1837258-ustanovka-dlya-ehksperimentalnogo-opredeleniya-parametrov-sledyashhikh-sistem.html" target="_blank" rel="follow" title="База патентов СССР">Установка для экспериментального определения параметров следящих систем</a>
Устройство для подвода жидкости под давлением через корпус подшипника внутрь гребного вала

Номер патента: 522782
Опубликовано: 25.07.1976
Автор: Виллем
МПК: B63H 23/36
Метки: вала, внутрь, гребного, давлением, жидкости, корпус, подвода, подшипника
...изобретения - уменьшение расхода ти через втулки подшипника. я этого ширина дополнительной камеры иет шнрину основной камеры н минн Кроме тогов виде конценбой обечаек, скольцами, ме1 полнительнаяполнен моноли01 Г 7 911 5 Ю ЗВ 522Камера 1 сообщена также посредствомканала Ф с нагнетательным насосом (начертеже не показан).Устройство выполнено,с дополнительнымикамерами 10 и 11, расположенными в корпусе подшипника по обе стороны камер 1 и 2,Корпус 12 подшипника может быть выполнен монолитным.Рабочая жидкость под давлением подае 1ся из нагнетательного насоса (на чертежене показан ,) по каналу Ь в дополнителы.ную камеру 1, а затем через канал О,в основную камеру 2, Из камеры 2 далеерабочая жидкость протекает по каналам ои 8 к...
Устройство для автоматического управления асинхронным двигателем в режиме частотного торможения

Номер патента: 985912
Опубликовано: 30.12.1982
МПК: H02P 3/22
Метки: асинхронным, двигателем, режиме, торможения, частотного
...момент времени й скольжение двигателя становится равным нулю и двигатель работает в режиме идеального холостого хода,являющегося границей между двигательным и генераторным режимами его работы. В этом режиме входной ток инвертора 3 имеет минимально возможное, близкое к нулю, положительноезнацение, равное активной составляющей намагничивающего тока двигателя, Активная составляющая намагничивающего тока обусловлена электрическими потерями в активном сопротивлении обмотки и магнитными потерями в сердечнике статора двигателя5 985912 буменьшение входного тока инвер-: шается до нуля, затем изменяет направ,тора 3 по мере подхода двигателя 5 ление и начинает плавно нарастать,к режиму идеального холостого хода . На интервале времени с - ( :2 3...
Способ управления шаговым двигателем в режиме самокоммутации и устройство для его осуществления

Номер патента: 1124419
Опубликовано: 15.11.1984
МПК: H02P 8/20
Метки: двигателем, режиме, самокоммутации, шаговым
...ко телем при парной коммутации его фаз. двДатчик положения ротора ориенти- . не рован таким образом, что в режиме фиксации пРи возбУждении опРеделен ус ных фаз двигателя на его выходах вырабатывается 4- разрядный код,дв приведенный ниже. 2,3 ОО 30 1100 3,4 4,1 1001 Номера возбужден- Код сигнала, постуных фаз двигателя пающего с датчика 25l1,2 001 Суммирование производится таким35 образом, что в случае переполнения сумматора (появление единицы в разря. де переноса) единица переносится в младший разряд, Многократное суммирование, а их число определяет ся числом фиксированных значений угла коммутации, позволяет получить требуемое значенв 1 е кода и соответствующий ему угол коммутации Фаэ двигателя.При возбуждении фаэ 1,2 с датчика45...
Способ управления двухфазным асинхронным двигателем в режиме прерывистого движения

Номер патента: 1317636
Опубликовано: 15.06.1987
Авторы: Аристов, Ткалич, Шутов
МПК: H02P 7/62
Метки: асинхронным, двигателем, движения, двухфазным, прерывистого, режиме
...напряжения.На фиг.2 изображены временные характеристики электромагнитного момента и координаты подвижного элемента АД для трех различных режимов.Нумерация сигналов на фиг,2 соответствует блокам на фиг.1. До моментавремени , АД 1 работает в режиме сшагом Мц = Ж, -Ж . В момент времени 15С, частота Г задающего генератора 5увеличивается с помощью задатчика шага 10, величина шага уменьшается1М, = Ж -Ж а длительность шага1становится равной Г В момент времени С полярность электрического сиг 2нала с задатчика 9 направления движения меняется на противоположнуюи на модулятор 8 поступают отрицательные модулирующие импульсы. В результате фаза питающего тока обмоткиоуправления меняется на 180 , электромагнитный момент меняет знак, а подвижный...
Неподвижный корпус подшипника для воздушных опор линейного перемещения

Номер патента: 1400515
Опубликовано: 30.05.1988
Автор: Зигфрид
МПК: F16C 17/08
Метки: воздушных, корпус, линейного, неподвижный, опор, перемещения, подшипника
...средство распределения воздуха в виде исходящих отцентра спиралеобразных в форме логарифмической спирали канавок 4 сплоским дном 5 в поперечном сечении,На периферии рабочей поверхности канавки 3 выполнены глухими. По длинеканавки 3 могут быть выполнены с уве-личивающейся к периферии корпуса глу,биной и/или шириной,Канавки 3 выполнены по дуге дли,ной не менее 360При исполнении и согласно фиг2на рабочей поверхности 2 корпуса 1по ее периферии выполнены отверстия6 для отвода воздуха и сообщающийсяс ним кольцевой канал 7.Для исключения вибраций в опоре 35,количество канавок 3 для распределения воздуха должно быть предпочтительно нечетным, а для стабильностиположения корпуса подшипника выполняют как минимум три отверстия 3 для...
Предыдущий патент: Устройство для измерения угла в системах числового программного управления
Следующий патент: Устройство для определения параметров линейных динамических объектов
Случайный патент: Устройство для тушения пожара с вертолета