Система определения дифферента
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
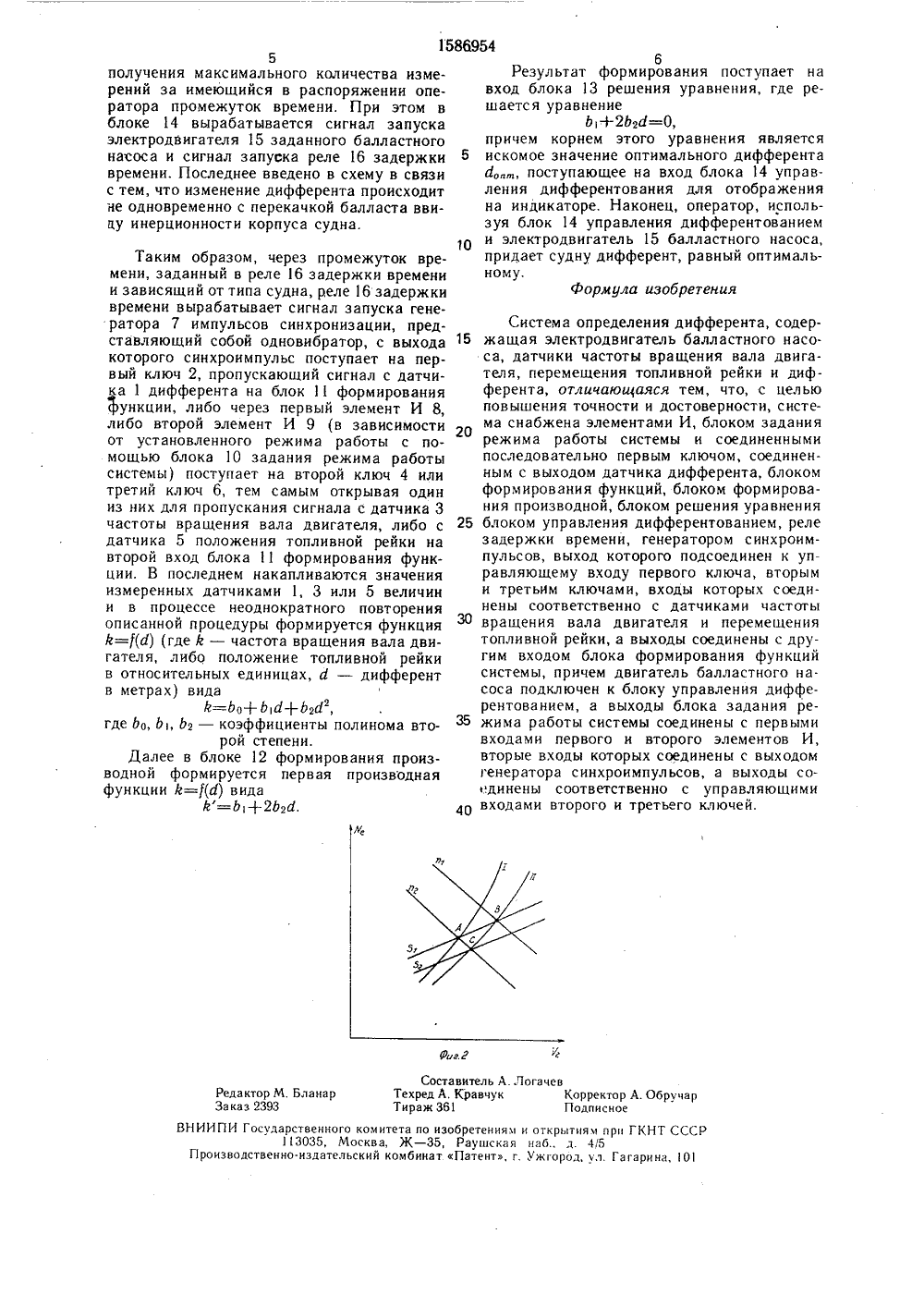
(51) 5 с ОПИСАНИЕ ИЗОБРЕТЕНИЯ ВИДЕТЕЛЬСТ К АВТОРСК 0 31 Е. Салов, В. Б. Б, Липис абу ы Оупаппс. К Мееру, 198 ат.283,Ф носится к системам для амических характерисодкости, за счет измереа. Цель изобретения - и достоверности опредержит датчик 3 частоигателя, датчик 5 переейки и датчик 1 диффено соединенные первый ГОСУДАРСТВЕННЫИ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР(57) Изобретение отизмерения гидродинтик судна, а именно хния дифферента суднповышение точностиделения. Система соты вращения вала двмещения топливной ррента, последователь ключ 2, блок 11 формирования функции, блок 2 формирования производной, блок 13 решения уравнения, блок 4 управления дифферентованием, реле 16 задержки времени, генератор 7 синхроимпульсов, выход которого подключен к управляющему входу первого ключа 2, второй 4 и третий 6 ключи, входы которых соединены соответственно с датчиками 3 и 5, а выходы - с другим входом блока 11 формирования функции, первый 8 и второй 9 элементы И, блок 10 задания режима работы системы и электродвигатель 15 балластного насоса, который подключен к блоку 14 управления дифферентованием. Выходы блока 10 задания режима работы системы соединены с первыми входами первого 8 и второго 9 элементов И, вторые входы которых соединены с выходом генератора 7 синхроимпульсов, а выходы - с управляющими входами второго 4 и третьего 6 ключей соответственно, 2 ил.Изобретение относится к системам для изменения гидродинамических характеристик корпуса судна, а именно ходкости, за счет изменения дифферента судна.Целью изобретения является повышение точности и достоверности.На фиг 1 изображена блок-схема системы определения дифферента судна; на фиг. 2 - участки ходовых характеристик судна с главным дизельным двигателем.Система определения дифферента содержит датчик 1 дифферента судна, выход которого подключен к входу первого ключа 2, датчик 3 частоты вращения вала двигателя, выходом подключенный к входу второго ключа 4, датчик 5 перемещения топливной рейки, выход которого подключен к входу третьего ключа 6. Второй вход первого ключа 2 соединен с выходом генераторасинхроимпульсов. Этот же выход соединен с первыми входами первого 8 и второго 9 элементов И, выходы которых соединены с другими входами второго 4 и третьего 6 ключей ссютветственно, причем второй вход первого элемента И 8 соединен с первым выходом блока 1 О задания режима работы системы, а второй вход второго элемента И 9 соединен с вторым выходом блока 10 задания режима работы системы.Выход первого ключа 2 соединен с первым входом блока 11 формирования функции, второй вход которого соединен с выходами второго 4 и третьего 6 ключей, выход блока 11 формирования функции через блок 12 формирования производной и блок 13 решения уравнения соединен с входом блока 14 управления дифферентованием, с выходов которого управляющие сигналы поступают на электродвигатель 15 балластного насоса и реле 16 задержки времени, Выход реле 16 задержки времени соединен с входом генератора 7 синхроимпульсов.Изменение дифферента судна изменяет сопротивление движению судна, ссютветственно при этом меняется режим работы пропульсивного комплекса. Если двигатель оснащен предельным регулятором частоты вращения вала, то .,ля по,щерждпия по. стоянной топливоподачи (5 -- -си;1) при изменении дифферента изменяется частот а вращения вала и. Если двигатель оснащен всережимным регулятором частоты прапения вала, то при изменении сопротивления движению судна регулятор о ссп. . цвас т постоянную частоту вращению вд =сопз 1) путем изменения подачиоц в двигатель через орган управления воподачей, Выбор оптимального дифферег: а заключается в поиске такого его значения, при котором величина изменяемого параметра (и или 5 - в зависимости от способа управления двигателем) достигает экстремума. Так при способе управления двигателем с помощью предельного регулятора условие оптимума дифферента наступает при и= 5 10 15 20 25 30 35 40 ьО 55=щах, при способе управления двигателем с помощью всережимного регулятора аналогичное условие наступает при 5=тт.Это можно проиллюстрировать на примере ходовых характеристик судна с главным дизельным двигателем (фиг, 2), где изображены участки этих характеристик (1 и 11) в координатах мощность двигателя М, - скорость судна 1,. Кривыми и и 5 показаны линии равных значений частоты вращения вала (и) и положения органа управления топливоподачей (топливной рейки) двигателя (5). Кривая 1 изображает характеристику при неоптимальном дифференте, кривая 11 - после оптимизации дифферента. При этом п)п 2 и 5)52, Точка А на кривой 1 характеризует равновесный режим работы пропульсивного комплекса до оптимизации дифферента. Оптимизация дифферента смещает характеристику вправо (облегчает) до кривой 11. При этом перемещение характеристики может происходить от точки А до точки В - при способе управления двигателем с помощью предельного регулятора (5=сопз 1), частота вращения повышается от п 2 до п, достигая при этом максимально возможной величины из всех замеряемых значений. Перемещение ходовой характеристики может также происходить от точки А до точки С - при способе управления двигателем с помощью всережимного регулятора (п=сопМ), положение топливной рейки при этом уменьшается от 5 до 52, достигая минимально возможной из всех замеренных значений.Таким образом, определять оптимальный дифферент судна можно, замеряя и (при 5=сопз 1) или 5 (при п=сопэ 1) в процессе изменения ходового дифферента судна и нахождения экстремума функции п=1(Ю или 5=И)Система работает следующим образом.На ходу судна на тихой воде или при незначительном волнении оператор, используя блок 10 задания режима работы системы, задает один из двух режимов работы системы в зависимости от способа управления двигателем (при фиксированной частоте вращения вала двигателя или при фиксированном положении топливной рейки), подготавливая тем самым первый элемент И 8 либо второй элемент И 9 к пропусканию импульса синхронизации от генератора синхроимцульсод 7 цд второй ключ 4 либо на третий к.,.о, 6 сс;ответственно. Блок 1 О задания режимов раооты системы содержит двухпозициопный переключатель и индикаторы режимд работы.Лдлее с помощью блока 14 управления дифкаг.,тованием, представляющего собой набор : цц:торов и пускателей электродвигат. . .:астных насосов, оператор произво, . ю изменений дифферента судна нд - пу, определенную для каждого типа, опытным путем из расчетаФормула изобретения Фиг. е Составитель А. ЛогачевТехред А, Кравчук Корректор А. Обруч Тираж 361 Подписное Редактор М. БланаЗаказ 2393 ИИПИ Г осударственного комитета по изобретен113035, Москва, Ж - 35, Раушс твенно-издательский комбинат Патент Произв 155получения максимального количества измерений за имеющийся в распоряжении оператора промежуток времени. При этом в блоке 14 вырабатывается сигнал запуска электродвигателя 15 заданного балластного насоса и сигнал запуска реле 16 задержки времени. Последнее введено в схему в связи с тем, что изменение дифферента происходит не одновременно с перекачкой балласта ввиду инерционности корпуса судна. Таким образом, через промежуток времени, заданный в реле 16 задержки времени и зависящий от типа судна, реле 16 задержки времени вырабатывает сигнал запуска генератора 7 импульсов синхронизации, представляющий собой одновибратор, с выхода которого синхроимпульс поступает на первый ключ 2, пропускающий сигнал с датчика 1 дифферента на блок 11 формирования функции, либо через первый элемент И 8, либо второй элемент И 9 (в зависимости от установленного режима работы с помощью блока 10 задания режима работы системы) поступает на второй ключ 4 или третий ключ 6, тем самым открывая один из них для пропускания сигнала с датчика 3 частоты вращения вала двигателя, либо с датчика 5 положения топливной рейки на второй вход блока 11 формирования функции. В последнем накапливаются значения измеренных датчиками 1, 3 или 5 величин и в процессе неоднократного повторения описанной процедуры формируется функция А=Яд) (где Й - частота вращения вала двигателя, либо положение топливной рейки в относительных единицах, д - дифферент в метрах) видаЙ=Ью+ Ь 4+Ьгс,где Ью, Ьь Ьг - коэффициенты полинома второй степени.Далее в блоке 12 формирования производной формируется первая производная функции /г=Яд) видай=Ь 1+2 Ьгд,869546Результат формирования поступает навход блока 13 решения уравнения, где решается уравнениеЬ+2 ЬгЫ=О,причем корнем этого уравнения является5 искомое значение оптимального дифферентад., поступающее на вход блока 14 управления дифферентования для отображенияна индикаторе. Наконец, оператор, используя блок 14 управления дифферентованиеми электродвигатель 15 балластного насоса,придает судну дифферент, равный оптимальному. Система определения дифферента, содер жащая электродвигатель балластного насоса, датчики частоты вращения вала двигателя, перемещения топливной рейки и дифферента, отличающаяся тем, что, с целью повышения точности и достоверности, система снабжена элементами И, блоком задания режима работы системы и соединенными последовательно первым ключом, соединенным с выходом датчика дифферента, блоком формирования функций, блоком формирования производной, блоком решения уравнения 25 блоком управления дифферентованием, релезадержки времени, генератором синхроимпульсов, выход которого подсоединен к управляющему входу первого ключа, вторым и третьим ключами, входы которых соединены соответственно с датчиками частоты 3 О вращения вала двигателя и перемещениятопливной рейки, а выходы соединены с другим входом блока формирования функций системы, причем двигатель балластного насоса подключен к блоку управления дифферентованием, а выходы блока задания ре жима работы системы соединены с первымивходами первого и второго элементов И, вторые входы которых соединены с выходом генератора синхроимпульсов, а выходы соединены соответственно с управляющими 4 О входами второго и третьего ключей,ням и открытиям при ГКНТ СССкая наб., д. 45 , г. Ужгород, ул. Гагарина, 101
СмотретьЗаявка
4221712, 06.04.1987
ПРЕДПРИЯТИЕ ПЯ Г-4488
ПЕВЗНЕР ЛЕОНИД АРНОЛЬДОВИЧ, САЛОВ ВИКТОР ЕВГЕНЬЕВИЧ, ХАБУР ВЯЧЕСЛАВ БОРИСОВИЧ, БОЛЬШАКОВ ВАЛЕНТИН ФИЛИППОВИЧ, ЛИПИС ВИКТОР БОРИСОВИЧ
МПК / Метки
МПК: B63B 39/14
Метки: дифферента
Опубликовано: 23.08.1990
Код ссылки
<a href="https://patents.su/3-1586954-sistema-opredeleniya-differenta.html" target="_blank" rel="follow" title="База патентов СССР">Система определения дифферента</a>
Устройство для определения средней осадки, крена и дифферента судна

Номер патента: 977266
Опубликовано: 30.11.1982
МПК: B63B 39/12
Метки: дифферента, крена, осадки, средней, судна
...11 памяти координат и блока 12 памяти коэффициентовБлок 2 датчиков уровня жидкости содержит параллельно соединенные датчики 13 и вспомогательный датчик 14, причем выход дополнительного коммутатора 10 соединен с входом блока 2 датчиков. Виислительный блок 3 включает в себя блок 15 вычисления единичных вариантов значений параметров, воторый представляет собой арифметическое устройство, и подключенный к нему блок 16 вычисления групповых вариантов, значений параметров (усред нитель данных) . Блоки 15 и 16 связаны с переключателем 17, соединенным с выходом коммутатора 9 и с входом блока 4 индикации измеряемых параметров, содержащим информационные та ло 18 средней осадки Т, табло 19 крена 6, табло 20 дифферента М, а также контрольный...
Блок формирования модуля

Номер патента: 1536473
Опубликовано: 15.01.1990
Автор: Березовский
МПК: H01H 83/20, H02H 3/40
Метки: блок, модуля, формирования
...вход,ток от источника тока, проходя через диод 5, резисторы 6 и 7, создает на неинвертирующем входе усилителя 2 некоторое некоторое напряжение вследствие чего на резисторе 11 возникает .такое же напряжение. Выходящий из инвертирующего входа усилителя 2 ток проходит через резистор 11 и его практически компенсирует ток, проходя" щий в инвертирующий вход усилителя 2 через нелинейный элемент 9 и резистор 10.536473 6 раз (где и с /К(с 2 п, п = 4),компенсирующее напряжение 32 (фиг.2 в).Напряжение 32, складываясь с напряжением 30 второй гармоники, возникающим также без сглаживания (фиг 2 а),образует указанное выходное напряжение 31 второй гармоники, возникающее при наличии сглаживания (фиг .2 б),Положительные полуволны напряжения32...
Блок формирования переноса

Номер патента: 1679482
Опубликовано: 23.09.1991
Авторы: Горский, Ковалев, Коваленко, Кривега
МПК: G06F 7/50
Метки: блок, переноса, формирования
...на входы 10 и 11 - сигналы генерации Ь=ХУ и распространения Р=Х+У переноса, где Х и % - 1-е разряды входных слагаемых, Если Ь=О и Р=О, то транзисторы 2, 3 и 5 будут закрыты и на выходе переноса 13 останется единичный потенциал, так как открыт транзистор 6 блока переноса предыдущего разряда, Если Ь=1 и Р=О, то транзисторы 3 и 5 будут закрыты, но откроется транзистор 2, и нулевой потенциал с шины 14 поступит на выход 13. Если Ь=О и Р=1, то транзистор 2 будет закрыт, но откроются транзисторы 3 и 5, и сигнал с входа 9 поступит на выход 13, Сопротивление открытого транзистора 6 значительно меньше сопротивления открытых транзисторов и-типа 1 - 5, Поэтому при подаче на вход 9 нулевого сигнала на входе элемента НЕ 8 установится потенциал,...
Устройство для формирования теста блока оперативной памяти

Номер патента: 1714609
Опубликовано: 23.02.1992
Авторы: Август, Гноевая, Зыков
МПК: G06F 11/26, G11C 29/00
Метки: блока, оперативной, памяти, теста, формирования
...параллельным 40занесением информации в регистр 22, информация с регистра 27 заносится в регистр22, Содержимое регистра 22 и информацияс выхода коммутатора 8 складываются всумматоре 23, и по спаду сигнала обращения, поступающего на вход управления параллельным занесением информации,сумма заносится в регистр 27. Если не возникает сигнала переноса при сложении всумматоре 23, то по спаду сигнала обращения на инверсном выходе триггера 29 устанавливается сигнал "1". Этот сигналпоступает на второй вход элемента И 30, напервый вход которого подается сигнал свхода управления суммированием блока 7 55суммированию, При этом на выходе переноса блока 7 суммирования устанавливаетсясигнал "1",Если при сложении в сумматоре 23 возникает сигнал...
Устройство для формирования диагностического ядра в системах с самодиагностикой

Номер патента: 674037
Опубликовано: 15.07.1979
МПК: G05B 13/02, G06F 11/28
Метки: диагностического, самодиагностикой, системах, формирования, ядра
...этого на каждом шагеНедостаток известного устройства эа-в качестве контролируемого выбирается ключается в том, что формирование диаг-.тот блок из числа не вошедших в синдром, ностического ядра осуществляется без у которого.С минимально. В зависимости учета информации о возможном состоянии от результата проверки контролирующий проверяемого блока. Вследствие этого блок или выбирает новый контролируемый,45 общее число проверок, необходиМых -для также с учетом значения С (отрицатель образования диагностического ядра, может . ный результат контроля), или передает быть значительным. В самом деле, пусть функции контроли контролируемому (поло сформирован нулевой синдром из с Ь жительный результат проверки). А тот, в блоков, Наращивание синдрома...
Предыдущий патент: Система определения метацентрической высоты судна
Следующий патент: Гидропневматический кранец
Случайный патент: Устройство для наполнения сосудовжидкостью