Способ управления электрогидравлическим следящим приводом дроссельного регулирования
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
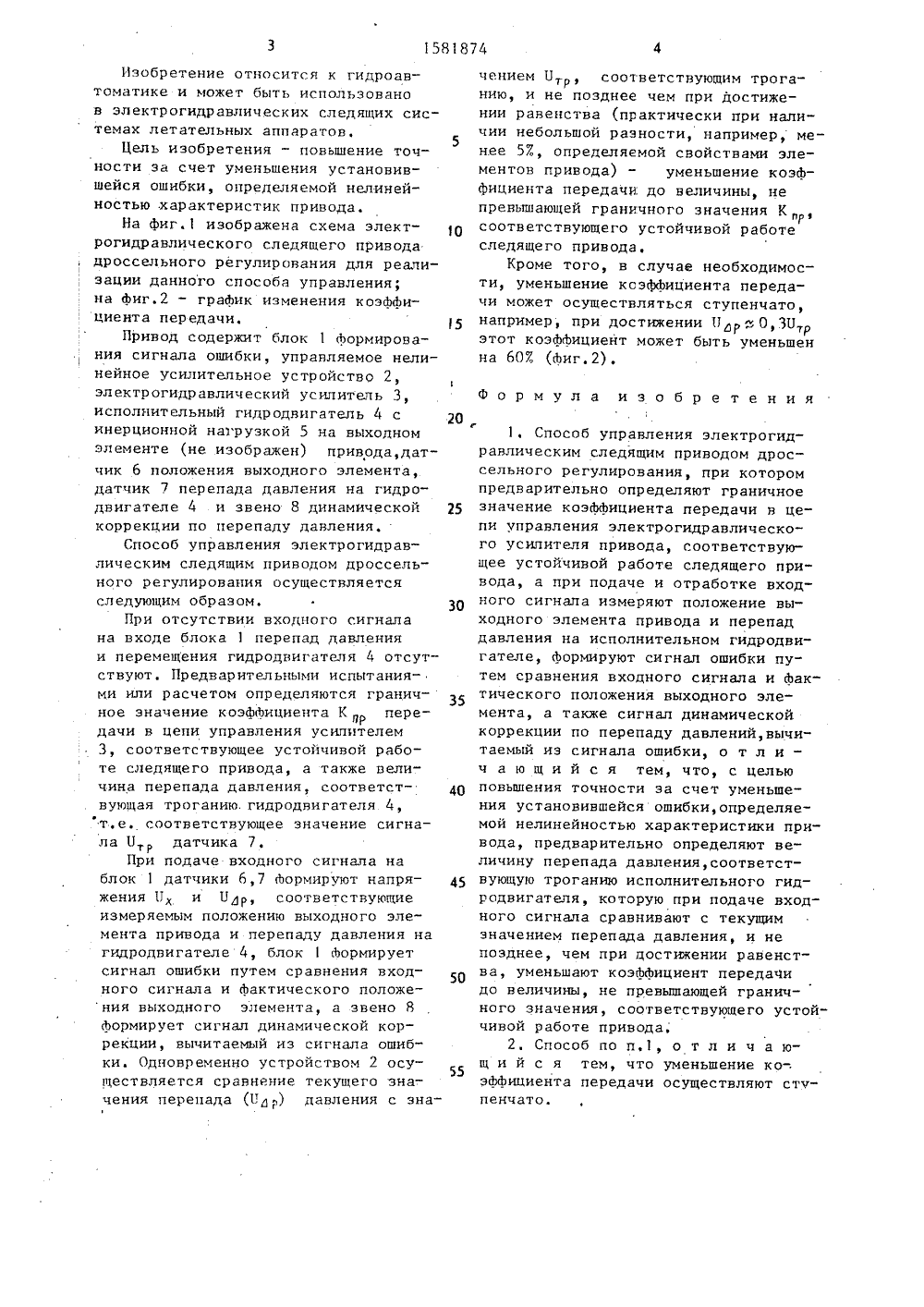
(51)5 Р 15 В 9/03 ИЕ ИЗОБРЕТЕН ГОСУДАРСТ 8 ЕННЬ(Й КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТНРЫТИПРИ ГКНТ СССР Н А ВТОРСНОМУ СВИДЕТЕЛЬСТВУ 1(56) Авторское свидетельство СССР (1 808712, кл, Е 15 В 9/03, 1979. (54) СПОСОБ У 11 РАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯ 1 ЦИМ ПРИВОДОМ ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ(57) Изобретение относится к области гидроавтоматики и может быть использовано В электрогидравлических следящих системах летательных аппара тов. Целью изобретения. является повьппение точности за счет уменьшения установившейся ошибки, определяемой нелинейностью характеристик привода. Предварительно определяются граничное значение коэффициента передачи в цепи управления усилителем З,соответствующее устойчивой работе привода, и величина перепада давления,соответствующая троганию гидродвигателя 4, При подаче входного сигналана блок 1 датчики 6,7 измеряют положение выходного элемента привода иперепад давления на гидродвигателе4. Блокформирует сигнал ошибкипутем сравнения входного сигнала иположения выходного элемента, а звено 8 формирует сигнал динамическойкоррекции, вычитаемый из сигналаошибки. Одновременно устройством 2осуществляется, сравнение текущегозначения перепада давления со значением, соответствующим троганию и непозднее чем при достижении равенства (т.е. при разнице не более 57)уменьшение коэффициента передачи довеличины, не превьппающей граничногозначения. 2 ид., 1 з.п. ф-лы,1Изобретение относится к гидроавтоматике и может быть использованов электрогидравлических следящих системах летательных аппаратов,Цель изобретения - повышение точности за счет уменьшения установившейся ошибки, определяемой нелинейностью .характеристик привода.На фиг.1 изображена схема электрогидравлического следящего приводадроссельного регулирования для реализации данного способа управления;на фиг.2 - граАик изменения коэААициента передачи.Привод содержит блок 1 Аормирования сигнала ошибки, управляемое нелинейное усилительное устройство 2,электрогидравлический усилитель 3,исполнительный гидр одвигатель 4 синерционной нагрузкой 5 на выходномэлементе (не изображен) привода,датчик 6 положения выходного элемента,датчик 7 перепада давления на гидродвигателе 4 и звено 8 динамическойкоррекции по перепаду давления,Способ управления электрогидравлическим следящим приводом дроссельного регулирования осуществляетсяследующим образом,При отсутствии входного сигналана входе блока 1 перепад давленияи перемещения гидродвигателя 4 отсутствуют. Предварительными испытаниями или расчетом определяются граничное значение коэфАициента Кпередачи в цепи управления усилителем3, соответствующее устойчивой работе следящего привода, а также величина перепада давления, соответствующая троганию. гидродвигателя 4,т.е. соответствующее значение сигнала Б р датчика 7.При подаче входного сигнала наблок 1 датчики 6,7 Аормируют напряжения П и Б, соответствующиеизмеряемым положению выходного элемента привода и перепаду давления нагидродвигателе 4, блок 1 Аормируетсигнал ошибки путем сравнения входного сигнала и фактического положения выходного элемента, а звено 8формирует сигнал динамической коррекции, вычитаемый из сигнала ошибки. Одновременно устройством 2 осуществляется сравнение текущего значения перепада (П) давления с зна 1чением 11 , соответствующим троганию, и не позднее чем при достижении равенства (практически при наличии небольшой разности, например, менее 57, определяемой свойствами элементов привода) - уменьшение коэффициента передачи до величины, не превышающей граничного значения Кпрю соответствующего устойчивой работе следящего привода.Кроме того, в случае необходимости, уменьшение коэфАициента передачи может осуществляться ступенчато, например, при достижении 115 О,ЗБ этот коэфАициент может быть уменьшен на 607, (Аиг. 2) . 1 О 15 Формула изобретения равлическим следящим приводом дроссельного регулирования, при котором предварительно определяют граничное значение коэффициента передачи в цепи управления электрогидравлического усилителя привода, соответствующее устойчивой работе следящего привода, а при подаче и отработке входного сигнала измеряют положение выходного элемента привода и перепад давления на исполнительном гидродвигателе, Аормируют сигнал ошибки путем сравнения входного сигнала и Аактического положения выходного элемента, а также сигнал динамической коррекции по перепаду давлений,вычитаемый из сигнала ошибки, о т л и - ч а ю щ и й с я тем, что, с целью повышения точности за счет уменьшения установившейся ошибки,определяемой нелинейностью характеристики привода, предварительно определяют величину перепада давления,соответствующую троганию исполнительного гидродвигателя, которую при подаче входного сигнала сравнивают с текущим значением перепада давления, и не позднее, чем при достижении равенства, уменьшают коэфАициент передачи до величины, не превышающей граничного значения, соответствующего устойчивой работе привода,2. Способ по и,1, о т л и ч а ющ и й с я тем, что уменьшение ко-.эффициента передачи осуществляют сттпенчато. 25 30 40 50 20, 1, Способ управления электрогид1581874 Редактор М.Товтин ожо аказ 2073 Тираж 528 ПодписноеНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР113035, Москва, Ж, Раушская наб., д, 4/5 Производственно-издательский комбинат "Патент", г. Ужгород, ул, Гагарина, 101 Составитель С.РоТехред Л.Олийнык твенскииКорректор
СмотретьЗаявка
4412264, 02.03.1988
ПРЕДПРИЯТИЕ ПЯ А-1173
ДАНИЛОВ НИКОЛАЙ ЕГОРОВИЧ, СИНИЦЫН ПЕТР ДМИТРИЕВИЧ
МПК / Метки
МПК: F15B 9/03
Метки: дроссельного, приводом, следящим, электрогидравлическим
Опубликовано: 30.07.1990
Код ссылки
<a href="https://patents.su/3-1581874-sposob-upravleniya-ehlektrogidravlicheskim-sledyashhim-privodom-drosselnogo-regulirovaniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления электрогидравлическим следящим приводом дроссельного регулирования</a>
Система передачи телевизионного сигнала с помощью дифференциальной импульсно-кодовой модуляции

Номер патента: 1107342
Опубликовано: 07.08.1984
Авторы: Векуа, Мурджикнели, Сулханишвили, Харатишвили
МПК: H04N 7/18
Метки: дифференциальной, импульсно-кодовой, модуляции, передачи, помощью, сигнала, телевизионного
...ошибки в петле обратной связи на передающей и приемной сторонах вводятся идентичные умножители 8 и 14 соответственно, Коэффициент умножения ныбирается меньше единицы и н этом случае искажения треков ошибки) приобретают затухающий характер. Однако при больших ошибках последние подавляются неэффективно. устранение такого рода искажений может быть осуществлено путем использованиясильных корреляционнь 1 х связей, существующих между соседними элементами изображения, Для этого каждая строка разбивается на блоки группы ), содержащие определенное количество элементов изображения; Последний эле мент каждой группы является контрольным. Расположения контрольных отсчетов, а следовательно, и группы меняются от строки к строке и от кадра к кадру,...
Устройство для имитации цифрового сигнала ошибки следящего привода

Номер патента: 1472870
Опубликовано: 15.04.1989
Авторы: Краев, Крутелев, Лопырев, Новиков, Помылев, Соловьев
МПК: G05B 11/00
Метки: имитации, ошибки, привода, сигнала, следящего, цифрового
...контакты ключа 23 на инвертирующий вход операционного усилителя24 с запоминающим элементом (конденсатором) 25 и резистором 26 обратнойсвязи.С выхода операционного усилителяэто напряжение (в виде управляющего напряжения постоянного тока) поступа 10 15 20 25 30 35 40 45 50 55 ет на выход блока памяти и гоответственно на вхоц следящего привода 6,привоця его в пвижеш.е, Это движениенаправлено в сторону уменьшения угларассогласования, что вызывает уменьшение сдвига фаз выходного напряжения фазовращателя 3 относительно его напряжения питания, и в динамикена выходе дифференциала 2 все времяпроисходит вычитание движения привода из движения аналогового программного механизма, а разность вызывает поворот ротора фазовращателя на...
Устройство для имитации цифрового сигнала ошибки следящего привода

Номер патента: 631860
Опубликовано: 05.11.1978
Авторы: Брук, Введенский, Руднева, Семенов, Трифонов
МПК: G05B 11/00
Метки: имитации, ошибки, привода, сигнала, следящего, цифрового
...модулятор 8, аналоговый программный механизм 9.Устройство работает следующим образом, За счет применения в качестве формирователя сигнала ошибки потенциометрического датчика, содержащего контактные ламели и движок, на выходе квангователя 2 сигнал ошибки получается квантован. ным по уровню. Квантование по времени с помощью запоминающего вход которого через замыкаФтакт 6 реле 5 подсоединяется анговагеля 2 на время, опреважностью импульсов широтно- модулятора 8 на входе реле5. Частоту смены информации определяют параметры широтно-импульсного модулятора 8. На время замыкания контакта 6 реле контакт 7 отключает выход запоминающего элемента 4 от входа следящего привода 1, имитируя обнуление старой информации перед записью...
Система передачи информации с адаптивной дифференциальной импульсно-кодовой модуляцией с компрессией сигнала ошибки предсказания

Номер патента: 1107308
Опубликовано: 07.08.1984
Авторы: Гнетнев, Маримонт, Новиков
МПК: H04J 13/02
Метки: адаптивной, дифференциальной, импульсно-кодовой, информации, компрессией, модуляцией, ошибки, передачи, предсказания, сигнала
...второй фильтр нижних частот, компрессор частоты дискретизации, адаптивный дельта-модулятор и мультиплексер, второй вход которого через кодер сигнала ошибки предсказания соединен с вторым выходом фильтра-анализатора, а на приемной стороне последовательно соединенные демультиплексер, адаптивный дельта-демодулятор, Фильтр нижних частот, экспандер частоты дискретизации, выравниватель спектра, фильтр-синтезатор и цифроаналоговый преобразователь, причем второй выход демультиплексера через декодер сигнала ошибки предсказания соединен с вторым входом фильтра- синтезатора, на передающей стороне введены блок постоянной памяти и последовательно соединенные блок вычисления величины искажения, блок управления и кодер индекса, выход которого соединен...
Датчик сигнала ошибки

Номер патента: 1210201
Опубликовано: 07.02.1986
Автор: Кочемасов
МПК: H03C 3/02, H03D 13/00
Метки: датчик, ошибки, сигнала
...К и Кр в зависимости от К известен, становится возможным обеспечить переход от (3) к (4), Это осуществляется в блоке 8, в котором производится компенсация шумов дроб 1 О 15 20 25 30 35 40 45 50 55 Когда на выходе делителя 2 частоты присутствует низкий уровень напряжения, на выходе первого счетчика 5 Формируется код начальной частоты К , определяющий начальный коэффициент деления ДПКД 4. При этом из блока 3 памяти по нулевому адресу извлекаются нулевые управляющие сигналы, которые поступают на управляющий вход блока 7 исключения импульсов и блока 8 компенсации шумов дробности. Когда уровень напряжения на.выходе делителя 2 частоты изменяется, первый и второй счетчики 5 .и 6 переходят в счетный режим, причем второй счетчик 6 по импульсам с...
Предыдущий патент: Двигатель
Следующий патент: Гидропривод рабочего органа путевой машины
Случайный патент: Гаситель колебаний ударного действия