Система управления гайковертом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1489973
Автор: Стариков
Текст
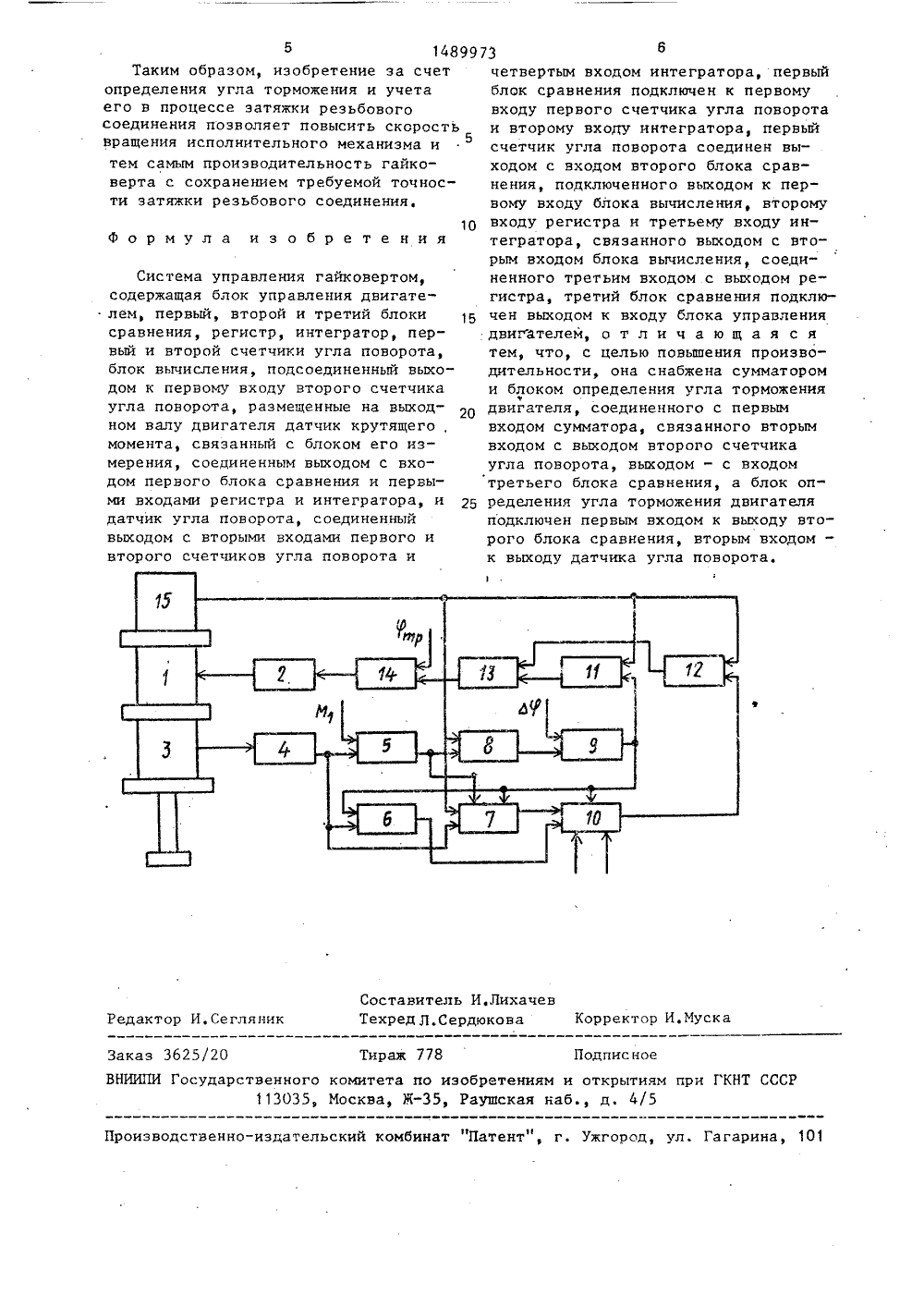
(56) Усроль унекий,произвАвтй 14024 43785 .12.8 .06.8 уйбьппе т им. В.Ста 1,883 тинов илия - Мех дства рское 21,25-2 Бюл. Р 24ский политехнически(088.8) В.В, и атяжки низация19 анов В,И. Контезьбовых соедии автоматизация 4,й":2,ьство СССР 21/00, 1986. М. сви кл. ВИзобретение относ строению, а именно к ,пения гайковертом и пользовано в любой ке резьбовых соедине иноизображена функционал емы управления гайкоится к а теж я схема с системам управ- может быть исотрасли при сбор ний,вертом,Систе содержитковерто а управления гадвигатель 1 с б датчик 3 крутящ мерения последн и око его омента,ервый равления,блок 4 из блок 5 ср ратор 7,проо,6 авнения, региспервый счетчик нтег- пово ения исполнител ого м орости низма. ГОСУДАРСТВЕННЫЙ НОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТНРЦТИЯМПРИ ГННТ СССР Н А ВТОРСКОМУ СВИДЕТЕЛЬСТ(54) СИСТЕМА УПРАВЛЕНИЯ ГАЙКОВЕРТОМ(57) Изобретение относится к системамуправления гайковертом. Цель изобретения - повьппение производительностиэа счет увеличения скорости вращенияисполнительного механизма. При вклю"чении блока 2 управления на двигател1 подается напряжение, соответствующее требуемой скорости вращения двигателя, который приводит во вращениегайку резьбового соединения. Датчик3 крутящего момента контролирует величину крутящего момента, приложенного к гайке резьбового соединения,а блок 4 измерения крутящего момента Цель изобретения - повьппениеизводительности за счет увеличе преобразует сигнал датчика 3 крутяще". го момента в цифровой код. На этапе затяжки резьбового соединения при достижении крутящим моментом величинысрабатывает блок 5 сравнения и выдает сигнал на включение интегратора 7 и счетчика 8 угла поворота, и при достижении на последнем приращения угла поворота Лсрабатывает второй блок 9 сравнения, который выдает сигнал на запись в регистр 6 момента р , соответствующего углу затяжки , включение блока 1 О вычисления и блока 11 определения угла ,. торможения двигателя и выключение интегратора 7. Сигналы текущих с значений угла (р затяжки и угла Ч торможения поступают на входы сумматора 13, При достижении суммы этих углов, равной, срабатывает третий блок 14 сравнения и выдает сигнал - на вход блока 2 который управляет УЬва торможением и остановкой двигателя 1. В процессе торможения вал двигателя с исполнительным механизмом.довернет- М ,ся на уголв результате чего Ж будет достигнуто требуемое значение Ж углазатяжки реэьбового соедине-ния.1 ил. СО14899 рота, второй блок 9 сравнения, блок 10 вычисления, блок 11 определения угла торможения двигателя 1, второй счетчик 12 угла поворота, сумматор 13, третий блок 14 сравнения, датчик5 15 угла поворота,Датчик 3 крутящего момента соединен со входом блока 4 измерения последнего. Выход блока 4 измерения кру О тящего момента соединен со входом блока 5 сравнения и с первыми входами регистра 6 и интегратора 7, На второй вход первого блока 5 сравнения подается двоичный код, соответствующийзначению момента М . Выход первогоблока 5 сравнения подключен к первому входу первого счетчика 8 углаповорота и второму входу интегратора 15 7. Выход первого счетчика 8 угла поворота соединен со входом второго блока 9 сравнения, на другой вход которого подается код, соответствующий заданному приращению угла Лповорота, Выход второго блока 9 срав" 25 После включения блока 2 управления на двигатель 1 подается напряжение соответствующее требуемому значению скорости вращения двигателя 1, котонения подключен к первым входам блока 10 вычисления и блока 11 определения углаторможения двигателявторому входу регистра 6, третьему входу интегратора 7, Выход интег Оратора 7 соединен со вторым входомблока 10 вычисления, к третьему входу которого подсоединен выход регист-,ра 6, Выход блока 10 вычисления соединен с первым входом второго счетчика 12 угла поворота, выход которого связан с первым входом сумматора13, Ко второму входу последнего подключен выход блока 11 определенияугла торможения двигателя 1. Выходсумматора 13 соединен со входомтретьего блока 14 сравнения, на другой вход которого подается код, соответствующий требуемому значению углаЦ р ЗЯТЯЖКИ ВЫХОД ТреТьего бЛОКЯ 4514 сравнения соединен со входом блока 2 управления двигателя 1. Выходдатчика 15 угла поворота подключенко вторым входам первого и второгосчетчиков 8 и 12 угла поворота, вто-.рому входу блока 11 определения углаторможения двигателя 1 и четвертомувходу интегратора 7.Система управления гайковертомработает следующим образом,55 734рый приводит во вращение гайку резьбового соединения (на чертеже не показаны).Датчик 3 крутящего момента контролирует значение крутящего момента,приложенного к гайке резьбового соединения, а блок 4 измерения крутящего момента преобразует сигнал датчика3 крутящего момента в цифровой код. На этапе затяжки резьбового соединения при достижении крутящим моментом значения И срабатывает блок 5 сравнения и вьдает сигнал на включение интегратора 7 и счетчика 8 угла поворота. При достижении приращением угла поворота на выходе счетчика 8 угла поворота значения дсрабатывает второй блок 9 сравнения, который выдает сигнал на запись в регистр б значения момента М , соответствующего значению угла затяжки , включение блоков 10 вычисления и 11 определения углаторможения двигателя1 и выключение интегратора 7, который к этому времени сформирует на своем выходе код, пропорциональныйАзначению 1 мБ. Блок 10 ньюисления через интервал времени порядка нескольких десятков микросекунд выдает на вход предварительной установки счетчика 12 угла поворота вычисленное значениеПосле чего счетчик 12 угла поворота начнет отсчитывать угол затяжки,начиная со значения , Одновременно блок 11 определения. угла торможения двигателя 1 преобразует сигналдатчика 15 угла поворота в цифровойкод, пропорциональньп текущему значению угла ц торможения.Сигналы текущих значений углазатяжки и углаторможения поступают на входы сумматора 13, которыйопределяет сумму ц + ц , При достижении суммой углов с +значения ( срабатывает третий блок14 сравнения и вьдает сигнал на входблока 2 управления двигателя 1, который управляет торможением и остановкой двигателя 1, В процессе торможения вал двигателя с исполнительныммеханизмом довернется на угол , врезультате чего будет достигнутотребуемое значение углазатяжкигррезьбового соединения,И.Лихачевдюкова оставите ехред Л.С ектор И.Мус Сегляник Редак Тираж 77 Заказ 36 ВНИИПИ Г дписн ретениям и открытиям при ГКНТ СССРушская наб., д. 4/5 дарственного комитета по из 113035, Москва, Ж,изводственно-издательский комбинат "Патент", г. Ужгород, ул. Гагарина, 10 6 14899Таким образом, изобретение за счет определения угла торможения и учета его в процессе затяжки резьбового соединения позволяет повысить скорость вращения исполнительного механизма и тем самым производительность гайковерта с сохранением требуемой точности затяжки реэьбового соединения. 1 ОФормула изобретения Система управления гайковертом, содержащая блок управления двигателем, первый, второй и третий блоки сравнения, регистр, интегратор, первый и второй счетчики угла поворота, блок вычисления, подсоединенный выходом к первому входу второго счетчика угла поворота, размещенные на выходном валу двигателя датчик крутящего, момента, связанный с блоком его измерения, соединенным выходом с входом первого блока сравнения и первыми входами регистра и интегратора, и датчик угла поворота, соединенный выходом с вторыми входами первого и второго счетчиков угла поворота и 736четвертым входом интегратора, первый блок сравнения подключен к первому входу первого счетчика угла поворота и второму входу интегратора, первый счетчик угла поворота соединен выходом с входом второго блока сравнения, подключенного выходом к первому входу блока вычисления, второму входу регистра и третьему входу интегратора, связанного выходом с вторым входом блока вычисления, соециненного третьим входом с выходом регистра, третий блок сравнения подключен выходом к входу блока управления двигателем, о т л и ч а ю щ а я с я тем, что, с целью повьппения производительности, она снабжена сумматором и блоком определения угла торможениячдвигателя, соединенного с первым входом сумматора, связанного вторым входом с выходом второго счетчика угла поворота, выходом - с входом третьего блока сравнения, а блок определения угла торможения двигателя подключен первым входом к выходу второго блока сравнения, вторым входом - к выходу датчика угла поворота,
СмотретьЗаявка
4343785, 15.12.1987
КУЙБЫШЕВСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. В. КУЙБЫШЕВА
СТАРИКОВ АЛЕКСАНДР ВЛАДИМИРОВИЧ
МПК / Метки
МПК: B25B 21/00
Метки: гайковертом
Опубликовано: 30.06.1989
Код ссылки
<a href="https://patents.su/3-1489973-sistema-upravleniya-gajjkovertom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления гайковертом</a>
Способ определения непрокатанной длины слитка в функции угла поворота прокатных валков и устройство для его осуществления

Номер патента: 908444
Опубликовано: 28.02.1982
МПК: B21B 38/00
Метки: валков, длины, непрокатанной, поворота, прокатных, слитка, угла, функции
...слиткапо сигналу с инверсного выхода датчи.ка наличия металла в прокатных вал"ках, поступающему на вход "Запись"блока памяти.Адрес ячейки блока памяти устанавливается по коду номера пропуска,поступающему с клемм "Номер пропуска" устройства управления прокатного стана,908444 30 Полученное значение текущей непрокатанной длины слитка,. кроме преимуществ, присущих предлагаемомуспособу, не содержит также погрешности установки датчиков начала 5и конца базового участка.Определение текущей непрокатанной длины слитка в функции угла поворота прокатных валков в соответствии с предлагаемым способом осуществляется следующим образом.Измеряют непрокатанную длину слитка в функции угла поворота прокатных валков от конца базового участкадо оси...
Устройство для определения погрешности преобразователя угла поворота вала в код

Номер патента: 993307
Опубликовано: 30.01.1983
МПК: G08C 25/00
Метки: вала, код, поворота, погрешности, преобразователя, угла
...преобразователя угла поворота вала в код, соединен с вторым входом второго элемента И, выход которого соединен с вторым входом первого регистра и третьим входом счетчика, выход проверяемого преобразователя угла поворота вала в код соединен с вторым входом блока преобразования и регистрации информации.Иа чертеже приведена блок-схема предлагаемого устройства.Устройство содержит привод 1, прецизионный понижающий редуктор 2, эталонный 3 и проверяемый 4 преобразователи угла поворота вала в код, блок 5 преобразования и регистрации информации, генератор 6 опорной частоты, триггер 7, элементы И 8 и 9, счетчик 10, сумматор 11 и регистры 12 и 13. 4 преобразователей. Р процессе работы на выходах преобразователейформируются сигналы смены...
Преобразователь угла поворота вала в код

Номер патента: 1144191
Опубликовано: 07.03.1985
Авторы: Петров, Соколов, Трусов
МПК: H03M 1/48
Метки: вала, код, поворота, угла
...изобретения является упрощение преобразователя угла поворота вала в код. Поставленная цель достигается тем, что в преобразователе угла поворота вала в код, содержащем синусцокосинусный вращающийся трансформатОр,выходы которого соединены с первым ивторым входами коммутатора квадрантов, цифровой выход которого соединен с входом блока распределения,с сигнальными входами первого и второго усилителей соответственно,.второй выход блока распределения соединен с первым входом регистра управления, первый выход которого соединен35 первым выходом соединенного с третьим входом коммутатора квадрантов, аналоговые выходы которого соединены с входами первого и второго усилителей, выходами соединенных с первыми входами первого и второго блоков ключей...
Преобразователь угла поворота вала в код

Номер патента: 1170617
Опубликовано: 30.07.1985
Авторы: Багдасарова, Луцык, Мединец, Рубинштейн, Франков
МПК: H03M 1/46
Метки: вала, код, поворота, угла
...фазочувствительный Выпрямительсодержит .последовательно соединенныеблок операционных усилителей, блок,усилителей-ограничителей, блок элементов сравнения и блок фильтров, выходы которого являются выходами фазочувствительного Выпрямителя, прямойвход каждого предыдущего операционного усилителя соединен с инверснымвходом последующего операционногоусилителя и являются информационными входами фазочувствительного выпря"мителя, а управляющий вход блокаэлементов сравнения является управля.ющим входом фазочувствительноговыпрямителя,Формирователь единичных приращений содержит первый и Второй элементы И, первый и второй формирователиимпульсов, первый и Второй элементыИ-НЕ и инвертор вход инверторасоединен с одним входом первого элемента И и...
Двухотсчетный преобразователь угла поворота вала в код

Номер патента: 1594693
Опубликовано: 23.09.1990
МПК: H03M 1/48
Метки: вала, двухотсчетный, код, поворота, угла
...формирователя 4, есливеличина рассогласования между кодомсумматора 10 и параметром сигнала 45датчика 1 превышает 1/4 часть зоны360точного отсчета, т.е в, Под дей"рствием напряжения рассогласованияблок 7 вырабатывает импульсы, изменяю 50щие код счетчика 8 и соответственносумматора 10 в сторону уменьшения рассогласования.При уменьшении рассогласования360 одо величины меньшей вблок б94 рподключает на вход блока 7 напряжениерассогласования формирователя 5, под деиствием которого изменяется кодмладших разрядов счетчика 8 до соответствия с параметром сигнала датчика 2 и, соответственно, с угловым положением вала. При согласованной установке датчиков 1 и 2 напряжение рассогласования формирователя 4 приэтом равно нулю и на выходе блока 9памяти...
Предыдущий патент: Система управления гайковертом
Следующий патент: Сверлильная машина
Случайный патент: Средство для чистки твердой поверхности "борин