Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
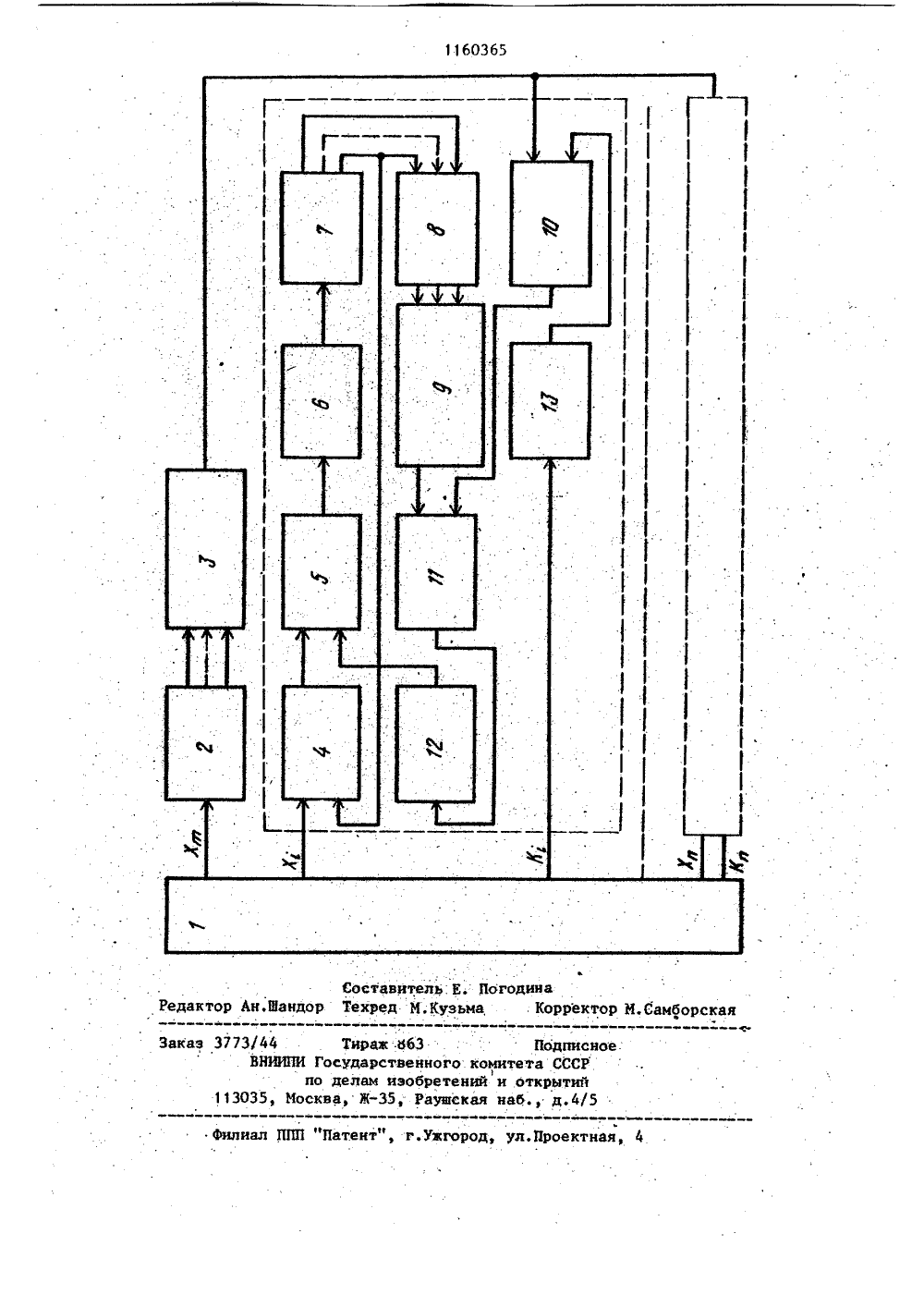
(9) ( 4(5) ПИСАН ЗОБРЕТ шемнойстештабев льь ГОСЖАРСТИЕННЫЙ НОМИТЕТ СОС 3 ф по делдМ. ИзоБ етений и отйфье И АВТОРСКОМУ СВИД(7) Ленинградский ордена Ленина электротехнический институт им. В,И,Ульянова (Ленина) (53). 62-50(088.8)(56) .Авторское .свидетельство СССР В 748 ЗЯ, кл. С 05 В М(8, 1980.Авторское свидетельство СССР В 7(6020, кл.С 05 В 19/18, (980,ЭиЬомвКУ Б., РезГогяез Э.Т. ТЬе арр 11 са 1 хоп оГ Иоде 1-кейегепсед Адара.че Сопг.го 1 Фо ЕоЬог.1 с Мал 1 ри 1 аСогв. - Лохп 1 АиСоша 11 с сопг.го 1 соп 1 егепсе. Юепчег, 979, р. 507-511 (54)(57) САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ, содержащая программный блок, первый выход которого соединен с входом эталонной модели, а остальные выходы - с входами соответствующих каналов регулирования координат движения, состоящих из последовате но соединенных регулятора, привода, механизма канала, блока датчиков ;состояния, фил тра-дифференциатора и блока сравнения, о т л и ч а ю - щ а я с я тем, что, с целью ловы ния точности отслеживания програм пространственной траектории, в си му дополнительно введены блок мас ных коэффициентов эталонного сигнала, а в каждый канал - блок масштабных коэффициентов сигнала фильтрадифференциатора, нелинейный усилитель, регистр и цифроаналоговый делитель, причем входы блока масштабных коэффициентов эталонного сигнала подключены к выходам эталонной модели, в каждом канале входы блока масштабных коэффициентов сигнала фильтра-диффе ренциатора соединены с соответствующими выходами фильтра-дифференциатора, а выход - с первым входом блока сравнения, выход которого подключен к входу нелинейного усилителя, соединенного своим вйходом с вторым входом привода, вход регистра подключен к выходу программного блока, а выход - к цифровому входу цифроаналогового делителя, второй вход которого соединен с выходом блока масштабных коэффициен тов эталонного сигнала, а выход - с вторым входом блока сравнения.Изобретение относится к автоматическому управлению и предназначено для управления перемещением электро- механического объекта по заданной траектории в трехмерном ортогональномпространстве, з том числе для управления.движением схвата или технологического органа промышленного робота, подачи металлорежущих станков и других устройств, где требует ся точное воспроизведение пространственной кривойЦель изобретения состоит в повышении точности отслеживания программной пространственной траектории.На чертеже приведена структурная схема предлагаемого устройства.Система содержит программный блок 1, эталонную модель 2, блок 3 масштабных коэФФициентом эталонного 20 сигнала, и каналы управления по числу координат движения каждый из которых состоит из регулятора 4 при- вода 5 механизма б канала, блока 7 датчиков состояния, фильтра-диффе-. 25 ренциатара 8, блока 9 масштабных коэффицие тов сигнала Фильтра-дифференциатора, цифроаналогового делителя 10, блока 11 сравнения, нелинейного усилителя 12, регистра 13. 30 Эталонная модель 2 представляет собой активный фильтр -го порядка, настройка которого обеспечивает желаемую динамику движения механизмов канала. Фильтр-дифференциатор выполняется на,операционных усилителях и служит для восстановления неизмеряемых переменных состояния.Блоки масштабных коэффициентов эта- щ 0 лонного сигнала и сигнала фильтрадифференциатора выполнены в виде суммирующих операционных усилителей сп вйэдами по каждому из которых ,реализован соответствующий коэффи циент усиления. Нелинейный усилитель имеет статическую характеристи.ку, близкую к релейной.Система функционирует следующимобразом,Программный блок 1 вырабатывает,задающие сигналы перемещения по каждому каналу х выбирает наибольшийнэ них х =Ваххх 1 и вычисляет коэффициент пропорциональностих;по каждому каналу К;= - .х,На вход эталонной модели 2 подается сигнал, соответствующий наибольшему перемещению х , на выходеэталонной модели вырабатываютсяпеременные состояния,: хз, х х"и т.д. Эти сигналы суммируются с соответствующими коэффициентами в блоке масштабных коэффициентов эталонного сигнала 3. Полученный эталонный сигнал умножается в каждом канале цифроаналоговым делителем 10на коэффициент пропорциональности К , поступающий в цифровом кодес программного блока 1 через регистр. 13.ВКаждый канал управления, замкнутый по положению (блоки 4-7), отрабатывает свой задающий сигнал х;,и переменные состояния, измеряемыенепосредственно или восстановленныес помощьюфильтра-дифферен 1 иатора 8,масштабируются и суммируются в блоке 9, Полученный сигнал, характеризующий действительчое состояниемеханизма канала сравнивается в блоке 11 с эталонным сигналом, полученным в блоке 1 О, ичерез нелинейныйусилитель 12 подается на второй входпривода 5, Характеристика нелинейного усилителя, близкая к релейной,обеспечивает быстродействие каналусамонастройки и точность поддержания пропорциональности всех переменных состояний в каждом канале управления,
СмотретьЗаявка
3677340, 22.12.1983
ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА ЭЛЕКТРОТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. УЛЬЯНОВА
АБАКУЛИН ЮРИЙ ВАСИЛЬЕВИЧ, ЕВСЕЕВА ЛЮДМИЛА ИВАНОВНА, ПОГОДИНА ЕЛЕНА ИВАНОВНА
МПК / Метки
МПК: G05B 13/04
Метки: самонастраивающаяся
Опубликовано: 07.06.1985
Код ссылки
<a href="https://patents.su/3-1160365-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Блок формирования тригонометрических коэффициентов для процессора дискретного преобразования фурье

Номер патента: 1072056
Опубликовано: 07.02.1984
Авторы: Звягинцев, Павлусь, Шевченко
МПК: G06F 17/14
Метки: блок, дискретного, коэффициентов, преобразования, процессора, тригонометрических, формирования, фурье
...входу формирователя приращений адреса, выход которого подключен к информационному входу регистра адреса, тактовый вход счетчика итераций соединен с выходом последнего разряда счетчика циклов, информационный выход которого подключен к второму входу формирователя приращений адреса, причем тактовый вход счетчика циклов является первым тактовым входом блока, тактовые входы первого и второго узлов постоянной памяти объединены и являются вторым тактовым входом блока, содержит формирователь дополнительного кода, шесть элементов И и три элемента ИЛИ, инверсный выход стар щего разряДа регистра адреса соединен с первыми входами первого, второго и третьего элементов И, прямой выход старшего разряда, регистра адреса подключен к первы 3 входам...
Устройство для определения коэффициентов гармоник квазисинусоидальной огибающей амплитудно-модулированного сигнала и его индекса сопутствующей угловой модуляции

Номер патента: 1404970
Опубликовано: 23.06.1988
Авторы: Беликов, Климашевский, Шпаньон
МПК: G01R 23/20
Метки: амплитудно-модулированного, гармоник, индекса, квазисинусоидальной, коэффициентов, модуляции, огибающей, сигнала, сопутствующей, угловой
...с частотой И,на входе смесителя 14 отсутствует инелинейность амплитудных характеристик смесителя 14 и анализатора 15спектра не может образовать спектральные составляющие с частотой Ь 1+ 2 й,так как подаваемый на смеситель 14 ьтате интермодуляционретьего порядка могутспектральные составразом, амплитуды спектр яющих с частотами ы,+ 2 зависят от второй гармоники огибающей АМ сигнала (т ) и от индекса частотной модуляции р. Далее переключатель 18 переводится в положение "Включен", После этого модулирующий сигнал поступает через фазовращатель 11 и ат- тенюатор 12 на ЧМ генератор 13.Сигнал с выхода ЧМ генератора 13 имеет вид ц, = Б,сояя,+ряз.п(Щ+сф)3,где р - индекс угловой модуляции;начальная фаза модулирующегосигнала.Далее...
Масштабный преобразователь кодов

Номер патента: 1569994
Опубликовано: 07.06.1990
Авторы: Потопальский, Сопрунов
МПК: H03M 7/12
Метки: кодов, масштабный
...11 частоты, Так какна синхронизирующем входе Р-триггера19 присутствует сигнал логической "1"с инверсного выхода 0-триггера 17,то вне зависимости от сигнала на его0-входе на его выходах (прямом и инверсном) сохраняются сигналы, произвольно установленные в момент подачипитания на преобразователь кодов.Сигналы с выходов Р-триггера 19 выполняют функцию аналогичную 0-триггеру 16(управление формированием счетных импульсов делителей 5,6 и 11), а такжеуправляют КБ-триггером 32. Сигналамис прямого и инверсного выходов КБтриггера 32 производится управлениеэлементами И 24 и 25, выполняющимироль коммутатора выходных импульсовСИ 2, СИЗ (фиг. 5) второго и третьегоделителей б и 11 частоты. При этомвторой вход элемента И 24 соединен свыходом второго...
Адаптивная система управления

Номер патента: 1071996
Опубликовано: 07.02.1984
Авторы: Бобух, Бодянский, Дьяченко, Зайцев, Руденко, Салыга, Сидревич
МПК: G05B 13/00
Метки: адаптивная
...инФормацияс ныходов о и Ь сдвоенного блока 11умножения, у которого первая группана основании информации, поступающейс выхода сумматора ошибки идентификации б и выхода сумматора 1 объекта,вычисляет значение ( У -)к, а втораягруппа на основании информации, поступающей с сумматора 8 ошибки управления, блока 17 задания стоимости60 управляющих воздействий и выхода сум 65 На чертеже изображена блок-схема предлагаемой адаптивной системы управления для варианта нестационарного многомерного объекта управления свходами и одним выходом.Адаптивная система управления содержит сумматор 1 объекта, объект 2 управления, модель 3 объекта управления, блок 4 задержки модели, сумматор 5 модели, сумматор б ошибки идентификации, блок 7 управления,...
Устройство для интегрирования электрического сигнала

Номер патента: 1115066
Опубликовано: 23.09.1984
Авторы: Бобков, Сенчина, Соболевский, Третилов
МПК: G06G 7/18
Метки: интегрирования, сигнала, электрического
...интегратора, цифровой выход блока формирования гибридного кода подключен к группе входов управления управляемого делителя частоты, частотный входкоторого соединен с выходом генератора импульсов, а выход - с информационным входом первого переключателя, причем управляющий вход второго переключателя подключен к выходу блока определения знака.На чертеже представлена структурная схема предлагаемого устройства.Устройство для интегрирования электрического сигнала содержит блок 1 выделения модуля, блок 2 определения знака, аналого-цифровойпреобразователь 3, второй цифроаналоговый преобразователь 4, блок 5 вычитания, инвертор 6, второй переключатель 7, аналоговый интегратор 8, управляемый делитель 9 частоты, генератор 10 импульсов,...
Предыдущий патент: Измеритель частоты гармонического сигнала
Следующий патент: Устройство для программного управления намоточным оборудованием
Случайный патент: Машина для мойки и очистки корнеклубнеплодов