Устройство для моделирования геометрических и силовых параметров гибких связей буксируемых в воде систем
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
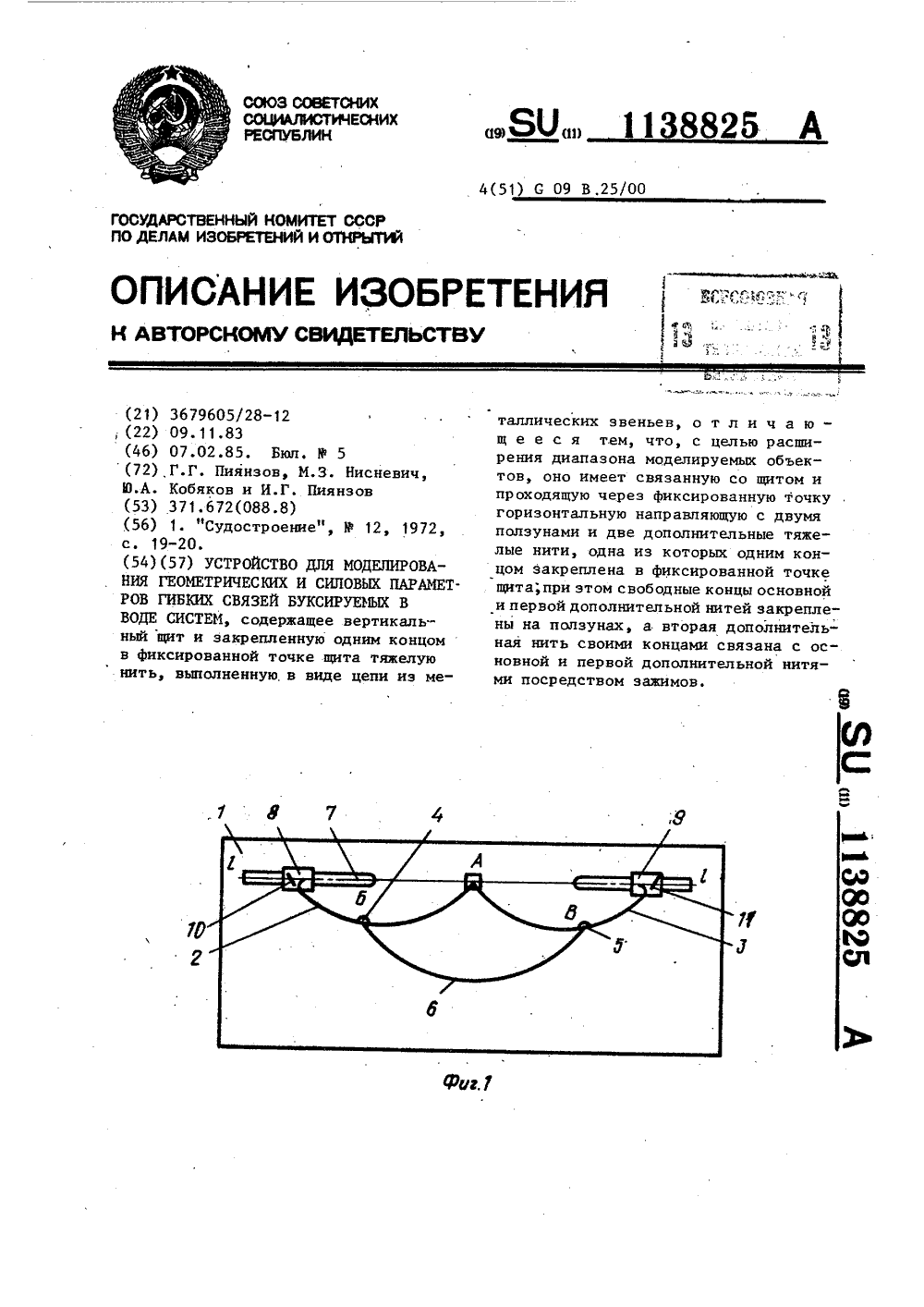
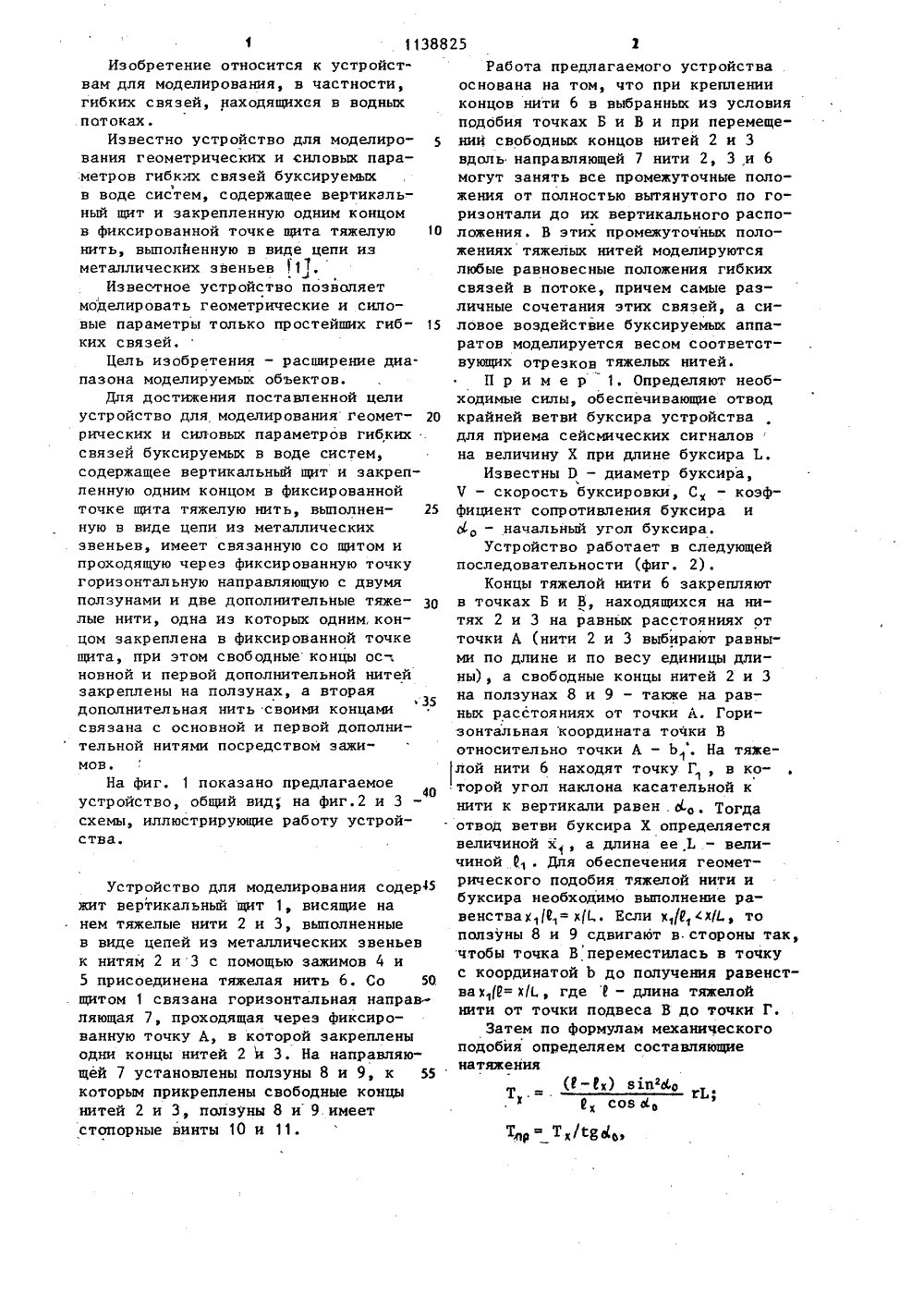
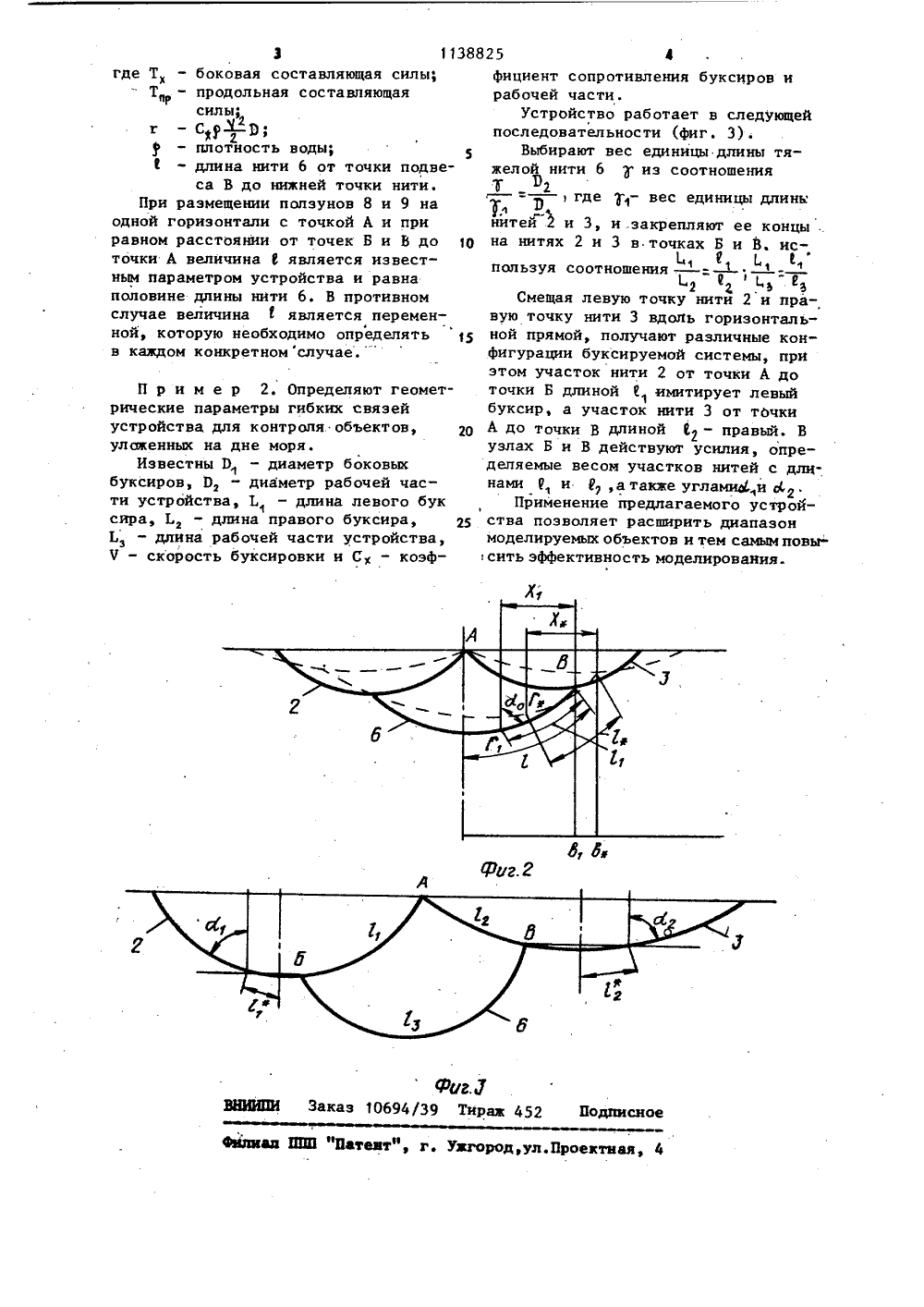
(51) С 09 0 ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЬГПФОПИСАНИЕ ИЗОБРЕТ ИЯ ЕЛЬСТВУ(72 Ю.А (53 72,ААМЕТ.(54)(57) УСТРОЙСТВО ДЛЯ МОДЕЛИРОНИЯ ГЕОМЕТРИЧЕСКИХ И СИЛОВЫХ ПАРРОВ ГИБКИХ СВЯЗЕЙ БУКСИРУЕМЫХ ВВОДЕ СИСТЕМ, содержащее вертикалный щит и закрепленную одним конв фиксированной точке щита тяжелнить, выполненную. в виде цепи из таллических звеньев, о т л и ч а ю - щ е е с я тем, что, с целью расширения диапазона моделируемых объьетов, оно имеет связанную со щитом и проходящую через фиксированную точку горизонтальную направляющую с двумя ползунами и две дополнительные тяжелые нити, одна из которых одним концом закреплена в фиксированной точке щита, при этом свободные концы основной и первой дополнительной нитей закреплены на ползунах, а вторая дополнительная нить своими концами связана с основной и первой дополнительной нитями посредством зажимов.Изобретение относится к устройствам для моделирования, в частности, гибких связей, находящихся в водных патоках.Известно устройство для моделирования геометрических и силовых параметров гибких связей буксируемых в воде систем, содержащее вертикальный щит и закрепленную одним концом в фиксированной точке щита тяжелую 1 О нить, выполйенную в виде цепи из металлических звеньев 1.Известное устройство позволяет моделировать геометрические и силовые параметры только простейших гиб ких связей.Цель изобретения - расширение диа. пазона моделируемых объектов.Для достижения поставленной цели устройство для моделирования геомет рических и силовых параметров гибких связей буксируемых в воде систем, содержащее вертикальный щит и закрепленную одним концом в фиксированной точке щита тяжелую нить, выполнен ную в виде цепи из металлических звеньев, имеет связанную со щитом и проходящую через фиксированную точку горизонтальную направляющую с двумя ползунами и две дополнительные тяже- З 0 лые нити, одна из которых одним, концом закреплена в фиксированной точке щита, при этом свободные концы ос-, новной и первой дополнительной нитей закреплены на ползунах, а вторая35 дополнительная нить своими концами связана с основной и первой дополнительной нитями посредством зажимов.На фиг. 1 показано предлагаемое40 устройство, общий вид; на фиг.2 и 3 схемы, иллюстрирующие работу устройства. Устройство для моделирования содер 45 жит вертикальный щит 1, висящие на нем тяжелые нити 2 и 3, выполненные в виде цепей из металлических звеньев к нитям 2 и 3 с помощью зажимов 4 и 5 присоединена тяжелая нить 6. Со 50 щитом 1 связана горизонтальная направляющая 7, проходящая через фиксированную точку А, в которой закреплены одни концы нитей 2 и 3. На направляющей 7 установлены ползуны 8 и 9, к 55 которым прикреплены свободные концы нитей 2 и 3, ползуны 8 и 9 имеет стопорные винты 10 и 11.( Й х) в ьпаСогЬ; Д соз сС Работа предлагаемого устройства . основана на том, что при креплении концов нити 6 в выбранных из условия подббия точках Б и В и при перемещении свободных концов нитей 2 и 3 вдоль направляющей 7 нити 2, 3 и 6 могут занять все промежуточные положения от полностью вытянутого по горизонтали до их вертикального расположения. В этих промежуточных положениях тяжелых нитей моделируются любые равновесные положения гибких связей в потоке, причем самые различные сочетания этих связей, а силовое воздействие буксируемых аппаратов моделируется весом соответствующих отрезков тяжелых нитей.П р и м е р 1. Определяют необходимые силы, обеспечивающие отвод крайней ветви буксира устройства для приема сейсмических сигналов на величину Х при длине буксира Ь.Известны Р - диаметр буксира, Ч - скорость буксировки, С - коэффициент сопротивления буксира и ор - начальный угол буксира.Устройство работает в следующей последовательности (фиг. 2).Концы тяжелой нити 6 закрепляют в точках Б и В, находящихся на нитях 2 и 3 на равных расстояниях от точки А (нити 2 и 3 выбирают равными по длине и по весу единицы длины), а свободные концы нитей 2 и 3 на ползунах 8 и 9 - также на равных расстояниях от точки А. Горизонтальная координата точки В относительно точки А - Ъ, На тяжелой нити 6 находят точку Г, в которой угол наклона касательной к нити к вертикали равен .со Тогда отвод ветви буксира Х определяется величиной х 1, а длина ее Ь - величиной 11 . Для обеспечения геометрического подобия тяжелой нити и буксира необходимо выполнение равенствах 1/Ю= х(.Если х,ф схй., то ползуны 8 и 9 сдвигают в. стороны так, чтобы точка В переместилась в точку с координатой Ъ до получения равенствах(Р= хй где Р - длина тяжелой нити от точки подвеса В до точки Г.Затем по формулам механического подобия определяем составляющие натяжения- длина нити 6 от точки подвеса В до нижней точки нити.При размещении полэунов 8 и 9 на одной горизонтали с точкой А и при равном расстоянии от точек Б и В до 1 О точки А величинаявляется известным параметром устройства и равна половине длины нити 6. В противном случае величинаявляется переменной, которую необходимо определять в каждом конкретном случае. П р и м е р 2. Определяют геометрические параметры гибких связей устройства для контроля объектов, 2 О уложенных на дне моря.Известны Р 1 - диаметр боковых буксиров, 0 - диаметр рабочей части устройства, Ь- длина левого бук сира, Ь - длина правого буксира, 25 Ь - длина рабочей части устройства, Ч - скорость буксировки и С - коэф 25 4фициент сопротивления буксиров и рабочей части.Устройство работает в следующей последовательности (фиг. 3).Выбирают вес единицы длины тяжелой нити 6 у из соотношения т- = -где Г 1- вес единицы длинь: ь .нитей 2 и 3, и,закрепляют ее концына нитях 2 и 3 в точках Б и В. исеа пользуя соотношения . 1 1 1 1т Е , - ЕзСмещая левую точку нити 2 и правую точку нити 3 вдопь горизонтальной прямой, получают различные конфигурации буксируемой системы, при этом участок нити 2 от точки А до точки Б длиной 1 имитирует левый буксир, а участок нити 3 от точки А до точки В длиной 62 - правьй. В узлах Б и В действуют усилия, определяемые весом участков нитей с длннами Д, и Р,атакже угламиаи сС 2.Применение предлагаемого устройства позволяет расширить диапазон моделируемых объектов и тем самымповьг. сить эффективность моделирования.
СмотретьЗаявка
3679605, 09.11.1983
ПРЕДПРИЯТИЕ ПЯ Г-4956
ПИЯНЗОВ ГЕНРИХ ГРИГОРЬЕВИЧ, НИСНЕВИЧ МИХАИЛ ЗАЛМАНОВИЧ, КОБЯКОВ ЮРИЙ АНАТОЛЬЕВИЧ, ПИЯНЗОВ ИГОРЬ ГЕНРИХОВИЧ
МПК / Метки
МПК: G09B 25/00
Метки: буксируемых, воде, геометрических, гибких, моделирования, параметров, связей, силовых, систем
Опубликовано: 07.02.1985
Код ссылки
<a href="https://patents.su/3-1138825-ustrojjstvo-dlya-modelirovaniya-geometricheskikh-i-silovykh-parametrov-gibkikh-svyazejj-buksiruemykh-v-vode-sistem.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для моделирования геометрических и силовых параметров гибких связей буксируемых в воде систем</a>
Устройство для пропитки нитей и отжима связующего

Номер патента: 1719487
Опубликовано: 15.03.1992
Авторы: Галактионова, Цопа
МПК: D06B 3/06
Метки: нитей, отжима, пропитки, связующего
...не показано При этом создают натяжение нитей и уста. навливают угол смещения отжимного эле. мента от плоскости размещение направляющих гребенок в пределах 5-45 ф; в зависимости от задаваемой величины усилия отжима нитей, Натяжение нитей осущв. ствляют при помощи подающего ц приемного устройств (на схеме не показа.; ны). Установку угла смещения отжимноге узла осуществляют вращением винта 8 а гайке 10.Отжим излишков связующего с нитей. осуществляется путем силового контакта их с отжимным элементом за счет разложения усилия натяжения нитей на вертикальную и, горизонтальйую составляющие, возникающие при установке отжимного элемента ниже уровня (горизонтальнойплоскости установки) направляющих гребенок 2 и 4, При этом рабочий участок ленты 5...
Кранцевое устройство буксира

Номер патента: 1512852
Опубликовано: 07.10.1989
МПК: B63B 59/02
...устройства буксира; на фиг.б - крепление оконечностей кранцевых устройств буксира.Устройство содержит корпус 1 бук сира, на котором в ограничительных полосах 2; крепятся амортизационные элементы 3 и 4, на, которые установлен амортизационный элемент 5, во внутренних полостях этих амортиза ционных элементов 3-5 расположены гибкие связи 6 и 7, пропущенные через проушины соединительного элемента 8, выполненного с опорной пласти. ной, и посредством талрепов 9 и 30 10 закреплены на крепежных скобах 11. Устройство работает следующим образом.При обжатии сначала деформируется амортизационный элемент 5, расположенный поверх амортизационных элементов 3 и 4,. установленных на корпусе буксира, до того момента, когда его внутренние полости...
Устройство для одновременной гибки концов длинномерных заготовок

Номер патента: 623611
Опубликовано: 15.09.1978
Авторы: Андрейчук, Войтов, Левашкин
МПК: B21D 7/02
Метки: гибки, длинномерных, заготовок, концов, одновременной
...нижнюю опор" ную плиту 2 и верхнюю опорную плиту 3, привод 4, неподвижно закрепленные в верхней плите оправки 5 и узлы гиб ки, установленные один против другого и выполненные каждый в виде верх" ней пластины б и нижней пластины 7, размещенных между ними на оси 8 нажимного ролика 9 и на осях 10 обжимных роликов 11, закрепленного на плите 7 опорного бруска 12 для заготовки 13, а также ролика 14, закрепленного между опорными плитами 2 и 3 и связанного одновременно с пластинами б и 7 и с пластиной 15, шарнирно соединенной с приводом 4.В плите 3 выполнен паз 16 по форме заготовки, а в плите 2 - паз 17 го форме детали 18. На верхней плите по перямеТру паза установлены направляющие борта 19Устройство работает следующим образом.Заготовку 13...
Устройство для пропитки нитей и отжима связующего

Номер патента: 442849
Опубликовано: 15.09.1974
Авторы: Киневский, Луценко, Сорока, Шевченко
МПК: B05C 1/06
Метки: нитей, отжима, пропитки, связующего
...получают движение от кулачка, Непрерывный отжим связующего достигается регулировкой скорости попеременного открывания губок, Циклограммы движения верхних Элементовгубок сдвинуты на 180 о поворота кулачка, таким образом, обеспечивается попеременная последовательная работа губок.пРБДмеГ изОБРетипиУстройство для йройитки нитей а Изобретение относится к оборудованию для обработки стеклопластиков,Известны устройства для пропитки ничей и отжима связующего при Формировании изделий из стеклопластиков, содержащие ванну для связукьщего й пару отжимных губок.Цель изобретения - повышение производительности и надежности работы стройства.остигается она тем, что устройство снабжено дополнительной парой губок, причем верхние элементы обеих пар губок...
Устройство для пропитки нитей и отжима связующего

Номер патента: 643364
Опубликовано: 25.01.1979
Автор: Шевченко
МПК: B29G 7/00
Метки: нитей, отжима, пропитки, связующего
...тем, что устройство двумя парами последовательпожерых эластичных непрерыв, установленных перНЬнднкупяртымемым нитям с возможностью .ского смещения контактирую- тими ннтямн участка. На фнг. 1 показано устрощнй амид; на фнг. 2 - отжнразрез.Устройство дпя пропитжима связующего состоитдпя связующего, направпяющ2, отжнмные губки,в виденых лент 3 н 4, натянуты5, вращаемые посредствомс обгонными муфтамн 7 иной 8 н неподвижной 9.64331 НИИПИ 7913/17 Тираж 770 Подписное ап ППП фПвтентф, г. Ужгород, уп. Проектная, 4 Работает устройство спелуюшим образом,Подпежашие пропитке нити посредстввом гребенок 2 поступают в ванну 1со связующим и отжимаются либопервой, либо второи парой губок, При накоппении ворса верхняя лента 4 поднимается, а затем...
Предыдущий патент: Способ моделирования резистентности к гипогликемическому действию инсулина
Следующий патент: Магнитная головка стереофонического звукоснимателя
Случайный патент: Отводящий рольганг к ножницам