Кинематомер
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК А 1 С 01 В 7/2 ИСА ОБРЕТ ВТОРСКОМУ ЕТЕЛЬСТВ ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЬГГИИ(56) 1. Авторское свидетельство СССРпо заявке В 3286754/25-28,кл. С 01 В 7/28, 1981.2, Авторское свидетельство СССРИф 847009, кл. С О 1 В 7/28, 1981,(54)(57) КИНЕМАТОИЕР,содержащий импульсные преобразователи, устанавливаемые на звеньях контролируемого механизма, блок управления, входы которого соединены с выходами импульс ных преобразователей, цифровой сумматор, управляющим и информационным входами связанный с блоком управления кодонабиратели передаточного отношения звеньев, подключенные к блоку управления, цифро-аналоговый преобразователь и регистратор, о тл и ч а ю щ и й с я тем, что, с целью повышения точности, он снабжен блоком выделения кинематической погрешности, входы которого соединены с выходами блока управления, блоком приведения, первый вход которого подключен к блоку выделения кинематической погрешности, переключателем звена приведения, входы которого подключены к кодонабирателям, выходы - к второму входу блока приве- сЯ дения, а выход блока приведениясоединен с регистратором.Изобретение относится к машиностроению, а именно к средствам контроля зубчатых колес.Известен кинематомер, предназна 5 ченный для контроля кинематической погрешности многостепенных механизмов, соедржащий импульсные преобразователи, устанавливаемые на каждом звене многостепенного механизма, детали частоты, блоки добавления им" пульсов, подключенные к выходу делителей фазометр, связанный с выходами делителей и входом импульсного преобразователя начального звена механизма 1 3.Недостатком этого кинематомера является ограниченность передаточ- . ных отношений контролируемых механизмов.20Наиболее близким к изобретению по технической сущности является кинематомер, содержащий импульсные преобразователи, устанавливаемые назвеньях контролируемого механизма, блок управления, входы которого соединены с выходами импульсных преобразователей, цифровой сумматор, управляющим и информационными входами связанный с блоком управления, кодонабиратели передаточного отношения звеньев, подключенные к блоку управления, цифро-аналоговый преобразователь и регистратор 2 1.Недостатком этого кинематора является то, что сигнал с цифро-аналого 35 вого преобразователя содержит информацию о кинематической погрешности и несущую частоту, амплитуда которой значительно превосходит амплитуду по 40 лезной информации, поэтому возникают дополнительные погрешности при использовании, например, активных фильтров для вьделения кинематической погрешности.45Цель изобретения - повн:ление точности контроля.Указанная цель достигается тем, что кинематомер, содержащчй импульсные преобразователи, устанавливаемые на звеньях контролируемого механизма, б,ок управления, входы которого соединены с выходами импульсных пре. - образователей, цифровой сумматор, управляющим и информационным входами связанный с блоком управления, кодонабиратели передасочного отношения звеньев, подключенные к блоку управ: ления, цифро-аналоговый преобразователь и регистратор, снабжен блокомвьделения кинематической погрешности,входы которого соединены с выходамиблока управления, блоком приведения,первый вход которого подключен к блоку выделения кинематической погрешности переключателем звена приведения,входы которого подключены к кодонабирателям, выходы - к второму входу блока приведения,а выход блока приведения соединен с регистратором.На чертеже изображена структурнаясхема кинематомера.Кинематомер включает в себя импульсные преобразователи 11 12,устанавливаемые на П звеньях, контролируемого механизма 2,блок 3 управления, входы которого соединены с выходами импульсных преобразователей 1, 1 , 1 1 , цифрВуровой сумматор 4, управляющим и информационным входами связанный с блоком 3 управления, кодонабиратели5., 5, 55 передаточногоотношения звеньев, подключенные к блоку 3 управления, цифро-аналогов.лй преобразователь 6, регистратор 7, блок 8выделения кинематической погрешности,входы которого соединены с выходамиблока 3 управления, блок 9 приведения, первый вход которого подключенк блоку 8 выделения кинематическойпогрешности, переключатель 10 звенаприведения, входы которого подключены к кодонабирагепювыходы - к второму входу блока 9приведения, а выход блока 9 приведения соединен с регистратором 7.Блок 8 вьделения кинематическойпогрешности включает в себя последовательно соединенные управляемыегенераторы 11, 112 т 11, 11пилообразного напряжения с автоподстройкой крутизны, аналоговый сумматор 12 и фильтр 13, причем входыблока 8 вьделения кинематической погрешности являются входами управляемых генераторов 11, 112, 113, ,11па выход - выходом фильтра 13,Кинематомер работает следующим образом.Предварительно на каждом кодонабирателе 51 52 5 . " 5 ь устанавливают число, равное передаточному отношению соответствующего звена контролируемого механизма 2, имеющего о -1 степеней свободы.ФПередаточное число выбирают на осно1097894кроме информации о кинематической погрешности (первое слагаемое) содержит и сигнал несущей частоты (второеслагаемое), имеющий вид суммы пилообразных напряжений.Е /Т линейно меняется в пределах от О до 1,Зту несущую частоту исключают путем ее компенсации искусственно создаваемыми пилообразными сигналами.Блок 8 выделения кинематическойпогрешности посредством управляемыхгенераторов 11, 11 , 11 ,11 пиЭлообразного найряжейия с автоподстройки крутизны Формирует синхронизируемые блоком 3 управления пилообразные напряжения с периодами, равными пириодам между импульсами, идущимис соответствующего импульсного преобразователя, и суммирует эти сиг 1 алыпосредством аналогового сумматора 12с сигналами, идущими с цифро-аналогового преобразователя 6, импульсы синхронизации, идущие сблока управления, одновременно задают амплитудупропорционально ц соответствующегопилообразного напряжения. где ; - передаточные числа;перемещение звеньев;звено приведения;а - передаточное числона приведениядЕ . - кинематическая погрешность механизма, приведенная к 1-му звену.При работе механизма 2 с импульсных преобразователей 1 1 111 7 3 и поступают путевые импульсьГ; имеющие также информацию и о направлении перемещения звеньев контролируемого20 механизма. По приходу импульса с какого-либо преобразователя, например 1 , блок 3 управления подает кодовую команду соответствующего кодонабирателя, например 52 передаточного отг 25 ношения звеньев на информационный. вход цифрового сумматора 4, одновременно на управляющий вход - команду на сложение или вычитание (в зависимости от направления перемещения это 30 го импульсного преобразователя) поданного кода. Таким образом, общая суммарная информация от всех импульсных преобразователей 1 1 1 11 2 3 1 суммируется в цифровом сумматоре 4 и с помощью цифро-аналогового преобразователя 6 преобразуется в аналоговый сигнал.Однако этот аналоговый сигнал 12 э описываемый формулой 10зве 40 Ря:гт - "й.йе.-. с.г= т 1 1;1 т где Т - пространственный сигналпреобразователей4511 - коэффициент преобразования цифро-аналогового преобразователя,знак- математическая операция выделения дробной части числа, находящегося под50этим знаком,ВНИИПИ Заказ 419 б/35 Тираж 587 Подшесиое Филиюл ППП Пйтйит у ГеУззфОРОДу 3 зфПРОФЙтиййу 4 вании закона движения механизмов,содержащих зубчатые и винтовые механизмы, выражаемого формулой Сигнал с аналогового сумматора 12 поступает на фильтр 13, где выделяется необходимая оператору составляющая кинематической погрешности. Сигнал на выходе аналогового сумматора 12 пропорционален не только кинематической погрешности, приведенной к звену приведения, но и передаточному числу этого звена. Для исключения влияния передаточного числа на значение приведенной кинематической погрешности сигнал с фильтра 13, подаваемый на первый вход блока 9 приведения, уменьше=.тся импропорционально передаточному числу звена приведения, код которого подается на вход блока приведения путем уставовки переключателя 1 О в соответствующее положение.После этого кинематическая погрешность регистрируется регистратором 7. Предлагаемое изобретение позволяет повысить точность контроля и автоматизировать калибровку поступающей на регистратор кинематической погрешности.
СмотретьЗаявка
3511762, 16.11.1982
ПРЕДПРИЯТИЕ ПЯ А-3632
ШУЛЬГИН ЮРИЙ НИКОЛАЕВИЧ, ОСЬКИН СЕРГЕЙ ВЛАДИМИРОВИЧ
МПК / Метки
МПК: G01B 7/287
Метки: кинематомер
Опубликовано: 15.06.1984
Код ссылки
<a href="https://patents.su/3-1097894-kinematomer.html" target="_blank" rel="follow" title="База патентов СССР">Кинематомер</a>
Механизм поворота шпиндельного блока многошпиндельного автомата

Номер патента: 733867
Опубликовано: 15.05.1980
Авторы: Бирюков, Бутаев, Крепс
МПК: B23B 9/00
Метки: автомата, блока, механизм, многошпиндельного, поворота, шпиндельного
...валика7, на одном конце его закреплена вилка 8, в паэ которой входит ролик 9, дополнительно установленный на криво- шипе 4 на оси 10. На другом конце вали733867 4пает в контакт с участком б кулачка 14 и ролик 13 начинает перемещаться вверх, а следовательно через рычаг 11, валик 7, вилку 8 и ролик 9 кривошип 4 начинает возвращаться в исходное положение. После чего цикл повторяется для каждого угла поворота мальтийского креста 18. 3( закреплен рычаг 11 в котором установлена ось 12 с роликом 13. Ролик 13 контактирует с кулачком 14 (фиг. 3) и контркулачком 15, неподвижно установленными на задней стойке 16 токарного автомата. Поворот шпиндель- ного блока 17 осуществляется от кри- вошипа 4 через установленный на нем ролик 5, мальтийский крест...
Привод механизма газораспределения нижнего блока цилиндров звездообразного двигателя внутреннего сгорания

Номер патента: 1765471
Опубликовано: 30.09.1992
Авторы: Бутов, Ляпунов, Олейников, Феоктистов
Метки: блока, внутреннего, газораспределения, двигателя, звездообразного, механизма, нижнего, привод, сгорания, цилиндров
...сообщена с внутренней полостью кожухарессоры, имеющей винтовую или шнековуюнарезку. Кроме того, корпус насоса для откачки масла из картера совмещен с корпусом пОдшипника шестерни передачимеханизма газораспределения.На фиг,1 показан общий вид двигателявнутреннего сгорания с предлагаемымприводом механизма газораспределениянижнего блока цилиндров; на фиг,2 - поперечный разрез привода механизма газораспределения.Привод механизма газораспределениянижнего блока цилиндров содержит картер1 МГР, установленный на нем шестеренчатый откачивающий насос 2 (фиг.1), Откачивающий насос 2 включает корпус 3 (фиг,2) совсасывающей полостью 4, сообщенной смасляной полостью 5 картера 1 МГР,Коническая шестерня 6 передачи механизма газораспределения установлена...
Устройство для оценки технического состояния механизма с зубчатыми колесами

Номер патента: 1825967
Опубликовано: 07.07.1993
Авторы: Василенко, Вулгаков, Голованов, Микулович, Сергеев
МПК: G01B 7/28
Метки: зубчатыми, колесами, механизма, оценки, состояния, технического
...колесами, используя блок 3 получения сигналов кинематической погрешности, получают сигналы кинематиче-. ской погрешности отдельных участков кинематической цепи механизма. С помощью вибропреобразователей 6 получают вибрационные сигналы, возбуждаемые зубчатыми колесами, усиливают их согласующими усилителями 7, преобразуют в цифровую форму.с помощью аналого-цифровых преобразователей 8 и подают в блок 4 управления, обработки и отображения информации через блок 5 связи, с помощью устройства 15 съема информации получают сигналы с датчиков деформации 14, установленных на механизме, усиливают их усилителями 16, преобразуют в цифровую форму с помощью аналого-цифровых преобразователей и подают в блок 4 управления, обработки и отображения...
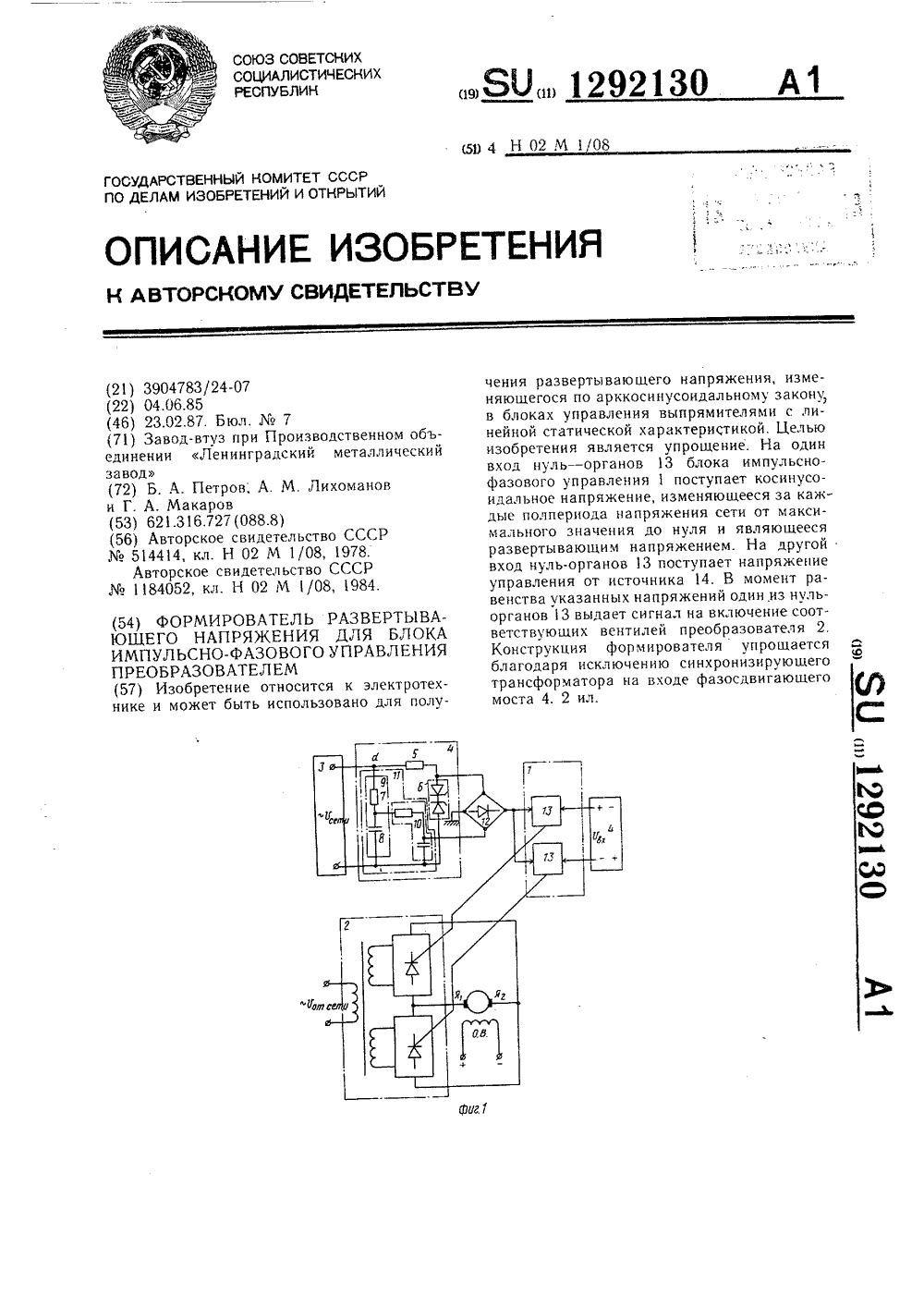
Формирователь развертывающего напряжения для блока импульсно-фазового управления преобразователем
Номер патента: 1292130
Опубликовано: 23.02.1987
Авторы: Лихоманов, Макаров, Петров
МПК: H02M 1/08
Метки: блока, импульсно-фазового, преобразователем, развертывающего, формирователь
...12, выход которого подключен к входам нуль-органов 13 блока импульсно-фазового управления 1, на другие входы которых поступает напряжение источника 14 управ- зо ления.Формирователь работает следующим образом.С выхода фазовращателя 11 снимаетсясинусоидальное напряжение У 11 (фиг. 2), которое по фазе сдвинуто на 90 эл. град, з 5 относительно напряжения сети ( .гз, фиг. 2).С ограничителя 6 снимаются прямоугольные импульсы 4, фиг. 2), которые складываются с напряжением, снятым с выхода фазоврашателя 11. В результате сложения получается напряжение, которое изменяется в первый полупериод напряжения сети Т/2 (фиг. 2) от положительного максимального значения до нуля по косинусоидальному закону И д (фиг. 2), а во второй полупериод - от...
Устройство для поиска информации на микрофише

Номер патента: 1264125
Опубликовано: 15.10.1986
Авторы: Антипов, Окуневич, Плешкин
МПК: G03B 21/11
Метки: информации, микрофише, поиска
...окончании поиска нужного кадра на элементе 24 Формируется импульс сброса, который снимает хранящуюся в памяти (элементы 26 и 27) команду о направлении поиска "Вперед" или "Назад". Формирователи 24 и 25 соединены с выходом схемы 23 совпадения блока 6 сравнения.С одного из выходов блоков 6 высокий уровень сигнала подается на один из входов элемента И 11 и формирователя.12. На другой вход элемента И 11 в каждый канал поступает нулевой уровень с выхода элемента 10, т.е. в период команды Стоп синхро 1262)125импульсы Отсуствуют, нет сигнала команд и на выходах формирователя 12. При появлении команд поиска, что соответствует нулевому уровню сигнала "Совпадение" элемент И 11закрывается и не пропускает на второй вход маркерные...
Предыдущий патент: Интегральный тензодатчик
Следующий патент: Устройство для определения положения конца проката
Случайный патент: Устройство для тепловой обработки железобетонных изделий и конструкций