Механизм передвижения крана мостового типа
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1071569
Авторы: Кузнецов, Меринова, Мухамедшина, Таугер
Текст
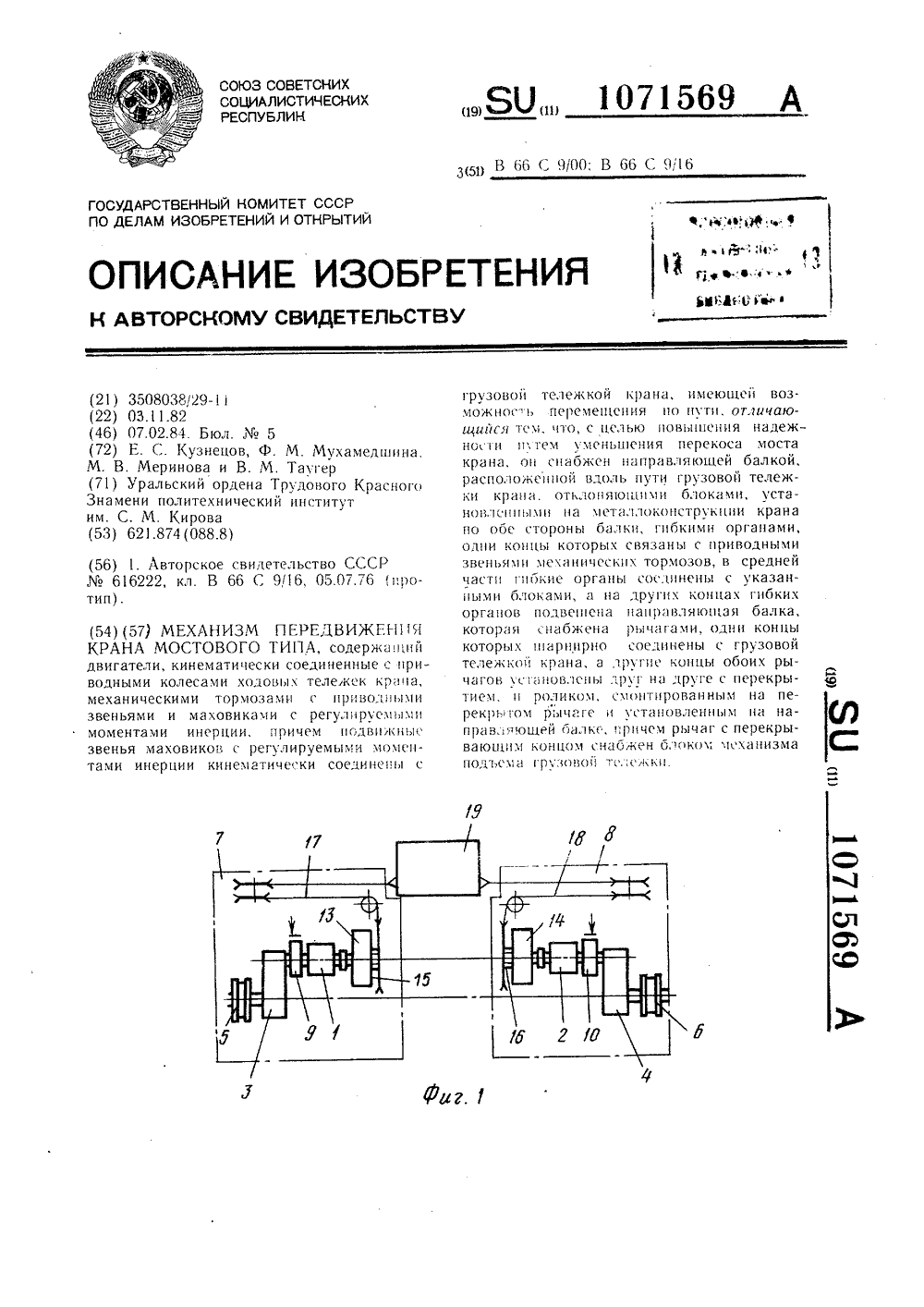
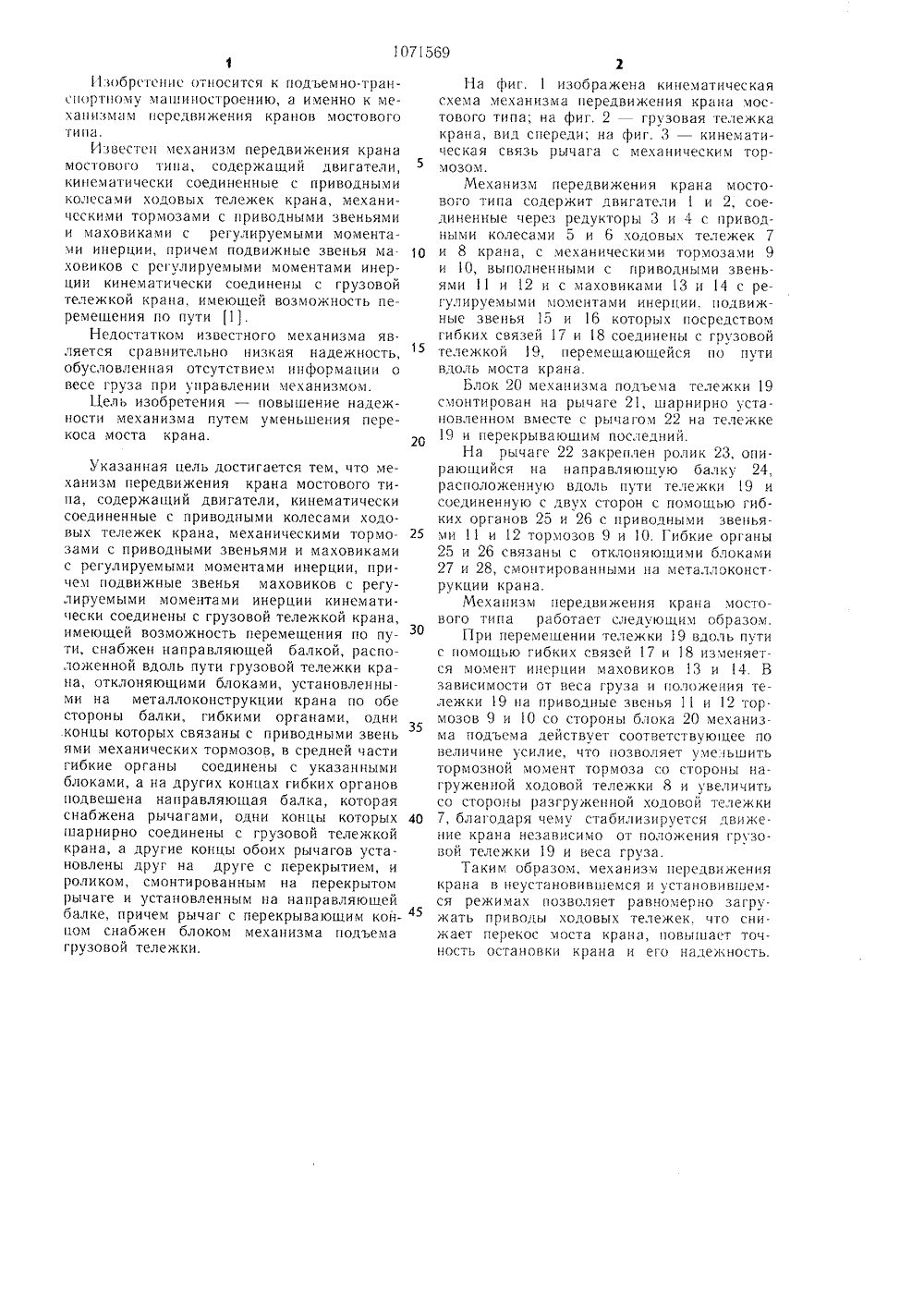
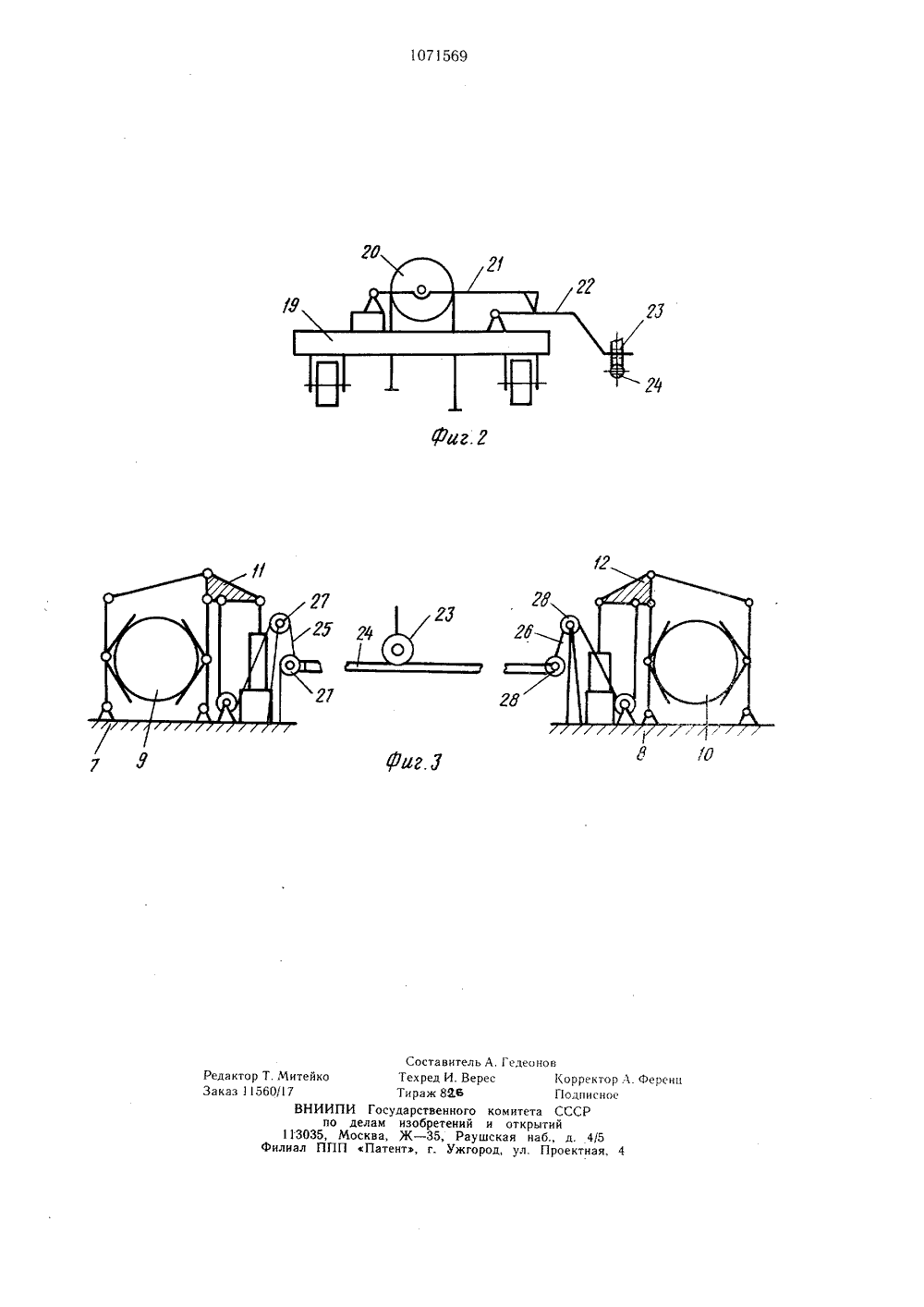
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСНРЕСПУБЛИН 715 66 С 9/00; В 66 С 9 МИТЕТ СССРЙ И ОТНРЫТИЙ СУДАРСТВЕННЫИ НО ДЕЛАМ ИЗОБРЕТЕН О. ЙВГ 54:Ь" "а ф САНИЕ ИЗОБРЕТЕНИЯ ТВУ КОМУ СВИ ЕТ КА медшинаКрасног ССР .76 11 ро(54) (57 МЕХАНИЗМКРАНА МОСТОВОГОдвигатели, кинематическводными колесами ходомеханическими тормоззвеньями и маховикаммоментами инерции,звенья маховиков с ретами инерции кинемат ПЕРЕДВИЖЕНЯ ТИПА, содержащий и соединенные с при вых тележек кра 1 а, МИ С ПРИВОД 11 Ь 1 МИ и с регулируемыми 1 РИЧЕМ ПОДВИжццс улируемыми момсциче.ки соединены с Ю(71) Уральскии ордена ТрудовогоЗнамени политехнический институим. С. М. Кирова(56) 1. Авторское свидетельство616222, кл. В 66 С 916, 05.0тип). грузовой тележкой крана, имсюгцей возможноеь перемещения по пути, отличаюии 11 ся тем, что, с целью повышения цадежнол и г, тем уменьшения перекоса моста крана, оц снабжен н 51 пр 1 вл 51 югцей балкой, расположец 1 юй вдоль пути грузовой тележки крана. Отклон 51 ю 1 цпх 1 и блоками, уста 1 И 1 вл ен н ы м и на металлок 1 шструкни и крана по обе стороны балки, гибкими органами, одни концы которых связаны с приводными звеньями механических тормозов, в средней части п 1 бкис органы соединены с указанными олоками, а на других коццах гибких органов подвешена цацравляюп;ая балка, которая снабжена рычагами, одни концы которых И 1 арцирно соединены с грузовой тележкой крана, а лр)1 ие концы Обоих рычагов усгацовлсцы друг на друге с перекрытием, и роликом, см 11 цтпровацным ца перекрь 1 ом рь 1 чаге и установленным ца направляюшей балке, 1;ричем рычаг с перекрываюгцим концом сцаб.кен б,1 оксгм механизма ПОДЪСМа ГРУЗОВОИ те.1 С 5 ККИ.1Изобретение относится к подъемно-транспортному машиностроению, а именно к механизмам передвижения кранов мостового тина.Известен механизм передвижения крана мостового типа, содержащий двигатели, кинематически соединенные с приводными колесами ходовых тележек крана, механическими тормозами с приводными звеньями и маховиками с регулируемыми моментами инерции, причем подвижные звенья маховиков с регулируемыми моментами инерции кинематически соединены с грузовой тележкой крана, имеющей возможность перемегцения по пути 1).Недостатком известного механизма яв. ляется сравнительно низкая надежность, обусловленная отсутствием информации о весе груза при управлении механизмом.Цель изобретения - повышение надежности механизма путем уменьшения перекоса моста крана. Указанная цель достигается тем, что механизм передвижения крана мостового типа, содержащий двигатели, кинематически соединенные с приводными колесами ходовых тележек крана, механическими тормозами с приводными звеньями и маховиками с регулируемыми моментами инерции, причем подвижные звенья маховиков с регулируемыми моментами инерции кинематически соединены с грузовой тележкой крана, имеющей возможность перемещения по пути, снабжен направляющей балкой, расположенной вдоль пути грузовой тележки крана, отклоняющими блоками, установленными на металлоконструкции крана по обе стороны балки, гибкими органами, одни концы которых связаны с приводными звень ями механических тормозов, в средней части гибкие органы соединены с указанными блоками, а на других концах гибких органов подвешена направляющая балка, которая снабжена рычагами, одни концы которых шарнирно соединены с грузовой тележкой крана, а другие концы обоих рычагов установлены друг на друге с перекрытием, и роликом, смонтированным на перекрытом рычаге и установленным на направляющей балке, причем рычаг с перекрывающим концом снабжен блоком механизма подъема грузовой тележки. 2На фиг. 1 изображена кинематическаясхема механизма передвижения крана мостового типа; на фиг. 2 грузовая тележка крана, вид спереди; на фиг. 3 кинематическая связь рычага с механическим тормозом.Механизм передвижения крана мостового типа содержит двигатели 1 и 2, соединенные через редукторы 3 и 4 с приводными колесами 5 и 6 ходовых тележек 7 О и 8 крана, с механическими тормозами 9и О, выполненными с приводными звеньями 11 и 12 и с маховиками 13 и 14 с регулируемыми моментами инерции, подвижные звенья 15 и 16 которых посредством гибких связей 17 и 18 соединены с грузовой тележкой 19, перемещающейся по пути вдоль моста крана.Блок 20 механизма подъема тележки 19смонтирован на рычаге 21, шарнирно установленном вместе с рычагом 22 на тележке 19 и перекрывающим последний.На рычаге 22 закреплен ролик 23, опирающийся на направляющую балку 24, расположенную вдоль пути тележки 19 и соединенную с двух сторон с помощью гибких органов 25 и 26 с приводными звенья ми 11 и 12 тормозов 9 и 1 О. Гибкие органы25 и 26 связаны с отклоняющими блоками 27 и 28, смонтированными на металлоконструкции крана.Механизм передвижения крана мостового типа работает следующим образом.При перемещении тележки 19 вдоль путис помогцью гибких связей 17 и 18 изменяется момент инерции маховиков 13 и 14. В зависимости от веса груза и положения тележки 9 на приводные звенья 1 и 12 тормозов 9 и 10 со стороны блока 20 механизма подъема действует соответствующее по величине усилие, что позволяет уменьшить тормозной момент тормоза со стороны нагруженной ходовой тележки 8 и увеличить со стороны разгруженной ходовой тележки 40 7, благодаря чему стабилизируется движение крана независимо от положения грузовой тележки 19 и веса груза.Таким образом, механизм передвижениякрана в неустановившемся и установившемся режимах позволяет равномерно загружать приводы ходовых тележек, что снижает перекос моста крана, повышает точность остановки крана и его надежность.Составитель А. Техред И. ВересТи аж 81 Б ГедеоновКорректор А.ФеренПодпнсносмитета СССРоткрытийая наб., д. 4/5ул. Проектная, 4 Редактор Т.МитейкоЗаказ 11560/17 РВНИИПИ Государственного кпо делам изобретений и113035, Москва, Ж - 35, РаушсФилиал ППП Патент, г. Ужгород
СмотретьЗаявка
3508038, 03.11.1982
УРАЛЬСКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. С. М. КИРОВА
КУЗНЕЦОВ ЕВГЕНИЙ СЕРГЕЕВИЧ, МУХАМЕДШИНА ФАИНА МИХАЙЛОВНА, МЕРИНОВА МАРГАРИТА ВАЛЕНТИНОВНА, ТАУГЕР ВИТАЛИЙ МИХАЙЛОВИЧ
МПК / Метки
МПК: B66C 9/00
Метки: крана, механизм, мостового, передвижения, типа
Опубликовано: 07.02.1984
Код ссылки
<a href="https://patents.su/3-1071569-mekhanizm-peredvizheniya-krana-mostovogo-tipa.html" target="_blank" rel="follow" title="База патентов СССР">Механизм передвижения крана мостового типа</a>
Грузовая тележка крана

Номер патента: 1444284
Опубликовано: 15.12.1988
МПК: B66C 11/02
Метки: грузовая, крана, тележка
...12 фиксатора 11 входит в стонорные гнезда 13 кронштейнов 14, установленных на раме 7 грузовой тележки 1, и контактирует с конечным выключателем 15 механизма передвижения грузовой тележки, исключающим возможность включения механизма передвижения грузовой тележки в момент поворота смотровой площадки.Контроль и обслуживание стрелы и ее устройств осуществляется следующим образом. Оператор входит на смотровую площадку 9 с посадочной площадки 16, расположенной на корне стрелы 3, после чего грузовая тележка 1 с оператором подается к месту обслуживания и оператор имеет возможность осмотреть как нижний, так и верхний пояса стрелы и обслужить устройства и приборы, установленные на них (фиг,4).Для осмотра и обслуживания торца и противоположной...
Грузовая тележка крана

Номер патента: 624870
Опубликовано: 25.09.1978
МПК: B66C 11/16
Метки: грузовая, крана, тележка
...этого на траверсе 3 установлен привод, включащий в себя двигатель 12, муфту 13, винт 14, опоры 15 винта, ползун 16, рычаги 17, одним концом связанные с одной парой поворотных вертикальных стоек 4, а другим - с ползуном 16, Другая пара стоек 4, установленных на противоположных углах траверсы 3, связана с указанной парой стоек посредством тяг . 18, шарнирно соединенных с рычагами 19. Грузовая тележка перемещается по пролетному строению 20 крана.Грузовая тележка работает следующим образом. В исходном положении прижим3 624870ной элемент 8 опирается упорами 11 натраверсу 3, а лапы 5 повернуты вдоль зования специальных механизмов, весомсамого поднимаемого груза. 1 рузовая тележка крана, преимущественно мостового типа, содержащая...
Грузовая тележка козлового крана

Номер патента: 819046
Опубликовано: 07.04.1981
Авторы: Крылов, Лебедев, Савушкин
МПК: B66C 11/14
Метки: грузовая, козлового, крана, тележка
...контактирует с конечным выключателем 22 механизма передвижения грузовой тележки, установленным для фиксирования среднего (бесконсольного) габаритного положения выдвижной дополнительной площадки (фиг. 13),На дополнительной площадке 15 установлены ограждения 23 с вертикальными стойками 24, перилами 25 и поперечными связями 26. Боковые стойки 27 ограждений выполнены из. телескопически раздвижных вертикальных стоек 28 и снабжены фиксаторами .29 выдвижения и площадками-ступеньками 30. Поперечные связи 31 верхних выдвижных стоек 28 на муфтах 32 подвижны вдоль стоек 28 в пределах заданного шага,5 10 15 20 25 зо 35 40 45 50 55 60 65 По перилам 25 ограждения 23 перемещается на роликоопорах 33 подвижная крышка 34, фиксируемая в средних и крайних...
Грузовая тележка для крана мостового типа

Номер патента: 517554
Опубликовано: 15.06.1976
Авторы: Абрамович, Лейбенко, Свердлик
МПК: B66C 11/02
Метки: грузовая, крана, мостового, тележка, типа
...закреплены у торцов моста 6.Каждое из ходовых колес 4 закреплено на одном из концов вала 13, другой конец которого используется для установки устройства для20 25 30 35 гашения колебаний грузовой тележки. Это устройство представляет собой фрикционный демпфер и содержит вращающийся элемент, выполненный в виде барабана 14, и монтированные на щите 15 фрикционные колодки 16, приводимые в действие с помощью рабочего гидроцилиндра 17.Щит 15 укреплен на кронштейне 18 стойки 2.Рабочие гидроцилиндры 17 обоих фрикционных демпферов трубопроводами 19 соединены с главным цилиндром 20, установленным на кабине управления 21 и кинематически связанным с педалью 22 управления, расположенной в этой кабине.При работе механизма передвижения тележки двигатель...
Устройство для предохранения мостовых кранов с грузовыми тележками от аварийного сближения

Номер патента: 516617
Опубликовано: 05.06.1976
Авторы: Павленко, Травин, Юровский
МПК: B66C 15/04
Метки: аварийного, грузовыми, кранов, мостовых, предохранения, сближения, тележками
...преодолевая сопротивление пружища, откло: кает двунлечий рычаг 10, который воздействует на концевой выключатель 11 механизма подъема, в результате чего крюковая обойма остановится, в траверса 6 останется в исходном положении, При этом проезд крана 2 верхнего яруса ивд краном 4 нижщ него яруса исключен, твк как взаимодействие скобы 1 и прутка 13 приведет к отклю-.чению приводов механизмов передвижения кранов. При касании скобы 1 металлического й 0 прутка 13,замыкается цепь питания реле блокировки движения крана 2 верхнего яру са. Размыкающий контакт реле блокировки расположен в цепи питания катушки линейного контакта, поэтому при раэмыкании 25 контакта реле блокировки выключается линейный контактор, и привод механизма передвижения крана...
Предыдущий патент: Захват-кантователь для колонн
Следующий патент: Устройство для подвода энергии к подвижному объекту
Случайный патент: Способ измерения интенсивности источника излучения и устройство для его осуществления