Система дистанционного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
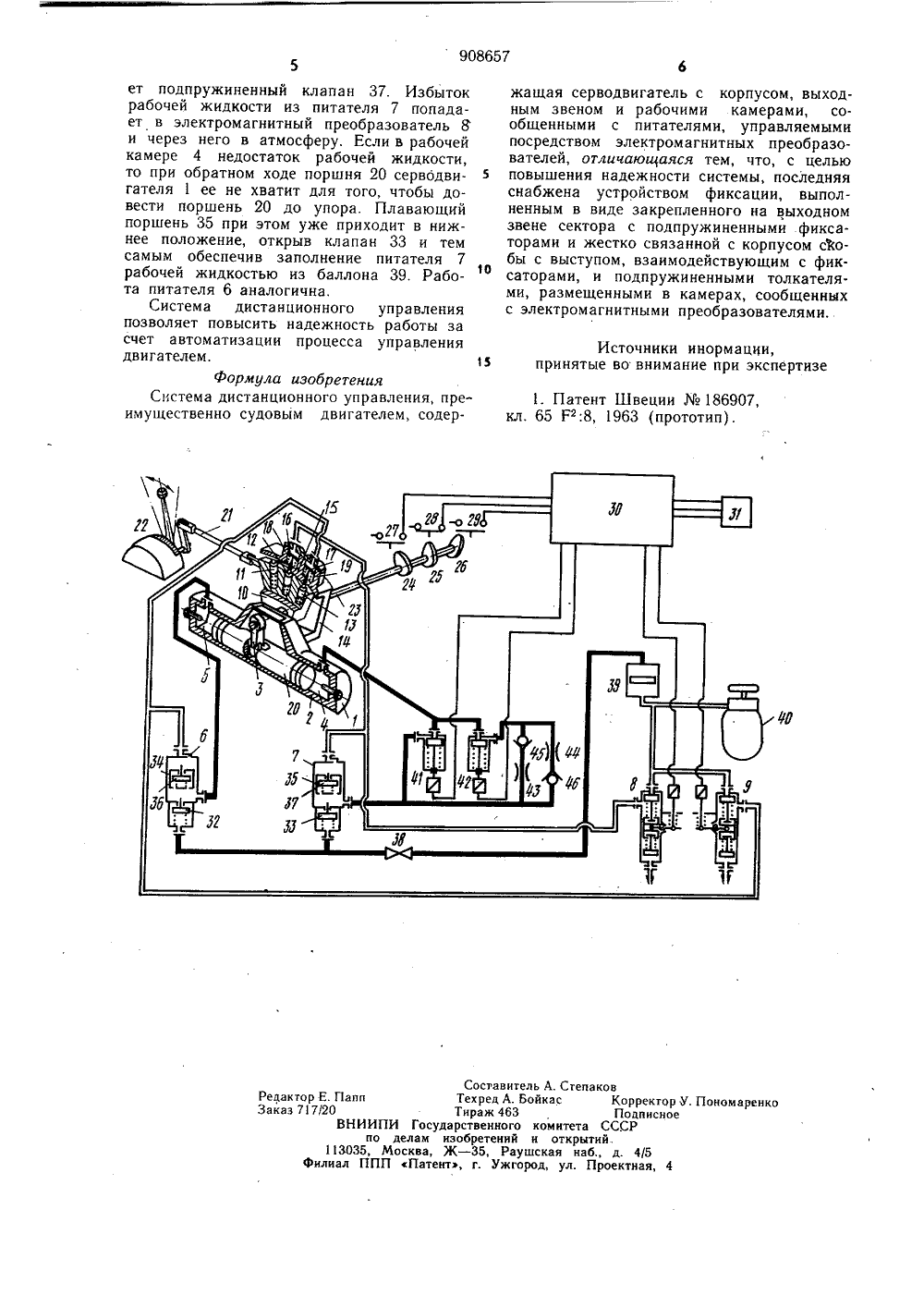
ОП ИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскихСоциалистическихРеспублик(53) УДК 621,313. .32:629.123. .2 (088.8) по аллам изооретеиий и открытий(54) СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ 1Изобретение относится к машиностроению и может быть использовано в системах гидропневмоавтоматики для управления двигателями.Известна система дистанционного управления, преимущественно судовым двигате лем, содержащая серводвигатель с корпусом, выходным звеном и рабочими камерами, сообщенными с питателями, управляемыми посредством электромагнитных преобразователей 1.Недостатком известной системы является отсутствие точной фиксации выходного звена серводвигателя, управляющего судовым двигателем, что снижает надежность работы системы в целом.Цель изобретения - повышение надеж ности системы.Поставленная цель достигается тем, что система дистанционного управления, содержащая серводвигатель с корпусом, выходным звеном и рабочими камерами, сообщенными с питателями, управляемыми пос 20 редством электромагнитных преобразователей, снабжена устройством фиксации, выполненным в виде закрепленного на выходном звене сектора с подпружиненными 2фиксаторами и жестко связанной с корпусом скобы с выступом, взаимодействующим с фиксаторами, и подпружиненными толкателями, размещенными в камерах, сообщенных с электромагнитными преобразо-.вателями.На чертеже изображена предлагаемая система дистанционного управления.Система содержит серводвигатель 1 с корпусом 2, выходным звеном 3 и рабочими камерами 4 и 5, сообщенными питателями 6 и 7, управляемыми посредством электромагнитных преобразователей 8 и 9. Система снабжена устройством фиксации, выполненным в виде закрепленного на выходном звене 3 сектора 10, с подпружиненными фиксаторами 11 - 13 и жестко связанной с корпусом 2 скобы 14 с выступом 15, взаимодействующим с фиксаторами 11 - 13 и подпружиненными толкателями 16 и 17, размещенными в камерах 18 и 19, сообщенных с электромагнитнымипреобразователями 8 и 9. Выходное звено 3 кинематически связано с поршнем 20 посредством тяги 21 с рукояткой 22 управления и с валом 23, иа котором установлены кулачки 24 - 26, взаимодействующие с концевыми выключа 908657телями 27 - 29, подключенными электрическими каналами к блоку 30 с постом 31 управления, Питатели 6 и 7 соответственно включают клапаны 32 и 33 и плавающие поршни 34 и 35 с подпружиненными клапанами 36 и 37 и сообщены через запорный клапан 38 к баллону 39 с источником 40 питания., Рабочая камера 4 подключена к питателю 7 через запорные клапаны 41 и 42, дроссели 43 и 44 и обратные клапаны 45 и 46.Система дистанционного управления работает следующим образом.Команда от поста 3.1 управления поступает в блок 30 управления и преобразуется им в командные сигналы, поступающие на электромагнитные преобразователи 8 и 9 и запорные клапаны 41 и 42, На чертеже серводвигатель 1 показан в положении Стоп.При подаче команды на изменение (увеличение) оборотов, например, судового двигателя (не обозначен) из положения Вперед, когда фиксатор 11 находится напротив толкателя 16, подается сигнал от блока 30 на запорный клапан 42 и электромагнитный преобразователь 8. Электромагнитный преобразователь 8 запирает нижним клапаном выход в атмосферу из своего корпуса и открывает верхний клапан, подавая сжатый воздух от источника 40 в пневматическую камеру питателя 7 и камеру 18 устройства фиксации. Воздух в камере 18 перемещает вниз толкатель 16, сжимая его пружину. Толкатель 16 утапливает фиксатор 12 до кромки сектора 10, разрешая тем самым его поворот. Сжатый воздух, попадая в пневматическую камеру питателя 7, перемещает его плавающий поршень 35 вниз, вытесняя рабочую жидкость через дроссель 43, обратный клапан 45 и открытый запорный клапан 42 в рабочую камеру 4 серводвигателя 1. Поршень 20 перемещается влево, поворачивая при помощи выходного звена 3 вал 23 и сектор 10. Сектор 10 перемещает через тягу 21 рукоятку 22 управления судовым двигателем. Сигнал от блока 30 поступает до тех пор, пока обороты двигателя не достигают требуемой величины. При снятии сигнала запорный клапан 42 закрывается, запирая совместно с запорным клапаном 42 обе, рабочие камеры 4 и 5 серводвигателя 1 и фиксируя тем самым его положение. Электромагнитный преобразователь 8 обесточивается, закрывая свой верхний и открывая нижний клапаны, При этом стравливается воздух из пневматической камеры питателя 7 и камеры 18 устройства фиксации. Пружина возвращает толка- тель 16 в исходное положение. Фиксатор 11 также освобождается и готов к повторному циклу,При подаче команды на уменьшение оборотов судового двигателя подается сигнал от блока 30 на запорный клапан 42 и электромагнитный преобразователь 9.Электромагнитный преобразователь 9 подает воздух от источника 40 в пневматическую камеру питателя б. Плавающий поршень 34 питателя б выжимает рабочую жид.кость в рабочую камеру 5 серводвигателя 1, Поршень 20 при помощи выходного звена 3 поворачивает вал 23, сектор 10 и через тягу 21 рукоятку 22 управления судовым двигателем, пока его обороты не достигают нужной величины. По приходе в положение 10 Вперед фиксатор 12 упирается в выступ 15скобы 14.Для перехода в положение Стопуправляющий сигнал с электромагнитного преобразователя 9 вначале снимается для приведения толкателя 17 в исходное положение, а затем из блока 30 подается на электромагнитный преобразователь 9 и запорный клапан 41. Сектор 10, кинематически связанный с рукояткой 22 управления судовым двигателем, быстро поворачивает 2 ф ся до упора фиксатора 13 в выступ 15 скобы 14. Быстрая скорость осуществляется открытием запорного клапана 41, шунтирующего дроссели 43 и 44. По приходе в положение Стоп управляющий сигнал снимается нажатием кулачка 25 на концевой выключатель 28.Для перехода в положение Назадуправляющий сигнал вновь подается на электромагнитный преобразователь 9 и запорный клапан 41. Цикл повторяется. Сигзо нал снимается нажатием кулачка 24 наконцевой выключатель 27. Поршень 20 серводвигателя 1 движется при этом до упора.Для перехода в положение Стоп иВперед из положения Назад подается сигнал на электромагнитный преобразователь 8 и запорный клапан 41. Работает питатель 7, толкатель 16, воздействующий сначала на фиксатор 13 (Назад - Стоп), а затем на фиксатор 12 (Стоп - Вперед), 4 Сигнал снимается от концевых выключателей 28 и 29. Обратные клапаны 45 и 46 позволяют обеспечить раздельную регулировку скоростей при увеличении и уменьшении оборотов судового двигателя, что бывает необходимо в эксплуатации. Запор ный клапан 38 необходим при первоначальном заполнении системы рабочей жидкостью.Питатели 6 и 7 автоматически поддерживают нужный объем рабочей жидкости в рабочих камерах 4 и 5 серводвигателя 1.Если воздух подается к питателю 6,рабочая жидкость из-под его плавающего поршня 34 подается в рабочую камеру 5 серводвигателя 1. Из рабочей камеры 4 рабочая жидкость переходит в питатель 7.Если в рабочей камере 4 серводвигателя 1 л избыток рабочей жидкости, то поршень 20еще не доходит до осевого упора, когда плавающий поршень 35 питателяприходит в свое верхнее положение и открыва908657 Составитель А.Техред А. БойкаТираж 463дарственного комизобретений и оЖ - 35, Раушскант, г. Ужгород,акое Корректор У Подписное Редактор Е. ПаЗаказ 717/20ВН оиомаренк И ПИ Госупо деламМосква,ППП Пат тета СССРкрытийнаб д. 4л. Проектн 1130 филиал4 ет подпружиненный клапан 37. Избыток рабочей жидкости из питателя 7 попадает в электромагнитный преобразователь 8 и через него в атмосферу. Если в рабочей камере 4 недостаток рабочей жидкости, то при обратном ходе поршня 20 серводвигателя 1 ее не хватит для того, чтобы довести поршень 20 до упора. Плавающий поршень 35 при этом уже приходит в нижнее положение, открыв клапан 33 и тем самым обеспечив заполнение питателя 7 рабочей жидкостью из баллона 39. Работа питателя 6 аналогична.Система дистанционного управления позволяет повысить надежность работы за счет автоматизации процесса управления двигателем. 15формула изобретенияСистема дистанционного управления, преимущественно судовым двигателем, содержащая серводвигатель с корпусом, выходным звеном и рабочими камерами, сообщенными с питателями, управляемыми посредством электромагнитных преобразователей, отличающаяся тем, что, с целью повышения надежности системы, последняя снабжена устройством фиксации, выполненным в виде закрепленного на выходном звене сектора с подпружиненными фиксаторами и жестко связанной с корпусом скобы с выступом, взаимодействующим с фиксаторами, и подпружиненными толкателями, размещенными в камерах, сообщенных с электромагнитными преобразователями. Источники инормацни,принятые во внимание при экспертизе1. Патент Швеции Мо 186907,кл. 65 Р:8, 1963 (прототип).
СмотретьЗаявка
1060585, 26.02.1966
ОРГАНИЗАЦИЯ ПЯ Р-6397
СИККУТ АВГУСТ ПЕТРОВИЧ, ШПЕРЛИНГ МИХАИЛ ГРИГОРЬЕВИЧ, БУКИН НИКОЛАЙ ПАВЛОВИЧ, ИОФА ЕВГЕНИЙ САУЛОВИЧ, ВДОВИНА ГАЛИНА АНДРЕЕВНА, СИРОТИН БОРИС ГЕОРГИЕВИЧ, МУШАНОВ АЛЕКСЕЙ ВАСИЛЬЕВИЧ, СТАФЕЕВА НИНА ФЕДОРОВНА
МПК / Метки
МПК: B63J 3/02
Метки: дистанционного
Опубликовано: 28.02.1982
Код ссылки
<a href="https://patents.su/3-908657-sistema-distancionnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система дистанционного управления</a>
Устройство для обработки электромагнитного сигнала

Номер патента: 987720
Опубликовано: 07.01.1983
Авторы: Вашковский, Герус, Зубков
МПК: H01P 1/218
Метки: сигнала, электромагнитного
...(Фиг.2). Распределенное в пространстве маг нитное поле рассеяния от Участков 10 проникает в. гиромагнитный вкладыш 1 и создает в нем периодическое магнитное поле, которое взаимодействует с магнитными волнами, распространяю щимися в гиромагнитном вкладыше 1 таким образом, что под дорожкой могут распространяться лишь волны, с длиной волны, равной или кратной периоду размещения одинаковых по размерам участков 10, т.е. происходит Фильтрация магнитных волн (Фиг.2 а).Частотная характеристика такого Фильтра определяется величиной магнитного поля, создаваемого магнитной системой 4,и периодом размещения участков 10 50 вдоль дорожки. Относительную полосу пропускания частот фильтра мощно увеличить при квазипериодическом размещении участков 10...
Устройство для обработки электромагнитного сигнала

Номер патента: 1309126
Опубликовано: 07.05.1987
МПК: H01P 1/218
Метки: сигнала, электромагнитного
...распространяющуюся в магнитной пластине 1 в направлении выходного преобразователя 4, где она преобразуется в выходные электромагнитные колебания. На пути распространения магнито статической волны в магнитной пластине 1 посредством изменения интенсивности теплового излучения источника 5, пространственного распределения коэффициента пропускания управ- О ляемого транспаранта 6, параметровпроекционной системы 7, интенсивности потоков охлаждающего агента через штуцеры 8, а также расположения самих штуцеров 8 осуществляется установление и изменение пространственного распределения температуры, а следовательно, и установление и изменение пространственно-неоднородного распределения намагниченности магнитной пластины 1.Конфигурация и степень...
Узел крепления запорных пластин на корпусе прямоточного клапана

Номер патента: 1177533
Опубликовано: 07.09.1985
Авторы: Двойников, Кирпиченков, Мамаев, Петров, Рогушин
МПК: F04B 53/10
Метки: запорных, клапана, корпусе, крепления, пластин, прямоточного, узел
...пластину с лапками, установленными . 10 в расточке и отогнутыми в канавку 1.Недостатком известного узла является наличие незаполненного объема расточки и канавки, являющегося мертвым пространством. 15Цель изобретения - повышение экономичности клапана путем уменьшения объема мертвого пространства.Поставленная цель достигается тем, что в узле крепления запорных 2 О пластин на корпусе прямоточного клапана, содержащем выполненную в торце корпуса глухую расточку с кольцевой канавкой и расположенную на торце пластину с лапками, установленными 25 в расточке и отогнутыми в канавку, в расточке и канавке расположены соответственно пробка и разрезное кольцо.На чертеже представлен узел креп- ЗО ления запорных пластин на корпусе прямоточного...
Электромагнитный клапан с дублированным запорным устройством

Номер патента: 387177
Опубликовано: 01.01.1973
Авторы: Вальтер, Вител, Григорьев, Диденко, Королев, Коростышевский, Маринин
МПК: F16K 31/06
Метки: дублированным, запорным, клапан, устройством, электромагнитный
...полусферы, и 5 с пружиной 6 и упоич:ое пе ния Элек ированюиийся ти, дубвидезапорн с дублм, отличая надежнос полнено в в другом, щее седло. ромагнитныи клапа порным устройство , с целью повышени ное устройство вь асположенных один апанов, имеющих об ным 3 тем, чт лирован двух, р ных кл электромагнитного иной в нем обойванных клапанов 4 ружины 8, перемеИзобретение может быарматуростроении,Цель изобретения - повэлектромагнитного клапанДля этого дублрованнполнено в виде двух, расв другом, запорных клапщее седло,На чертеже изображен пан.Клапан состоит изта 1, якоря 2 с закмой 3, в которой размго устройства, состояпана 4, выполненноговнутреннего клапанаром 7,В момент включенияклапана якорь с закрепмой 3 с системой дублири 5, преодолевая...
Устройство для перемещения и установки рабочего органа машины в заданном положении

Номер патента: 506316
Опубликовано: 05.03.1976
Автор: Поль
МПК: F15B 15/24
Метки: заданном, органа, перемещения, положении, рабочего, установки
...канады 39 и 40.Каналы управления 28 и 29 следящего золотника 1 соединены с насосом 58 и с резервуаром через четырехходовый пилотный клапан 59, позволяющий изменять направлениепотока масла между этими двумя каналами.На каждом из каналов управления 28 и 29имеются дроссельные клапаны 60 и 61 и редукторы давления 62 на канале, соединяющемнасос 58 с пилотным клапаном 59.Наконец, на каналах 26 и 27 возврата масла после их соединения устанавливают дроссельный клапан 63, шунтируемый клапаном 64.Устройство работает следующим образом.Когда к золотнику 3 не приложено усилиесо стороны рычага 51 и гидравлическое давление управления, последний находит я в положении равновесия, поскольку пояски 4 и 5перекрывают отверстия 24 и 25 сверлений 22и...
Предыдущий патент: Способ управления траекторией движения судна
Следующий патент: Устройство для дозирования вязких продуктов
Случайный патент: Насосная установка