Система управления манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 642671
Авторы: Андрюнин, Кулешов, Лысенко, Моисеенков, Шведов
Текст
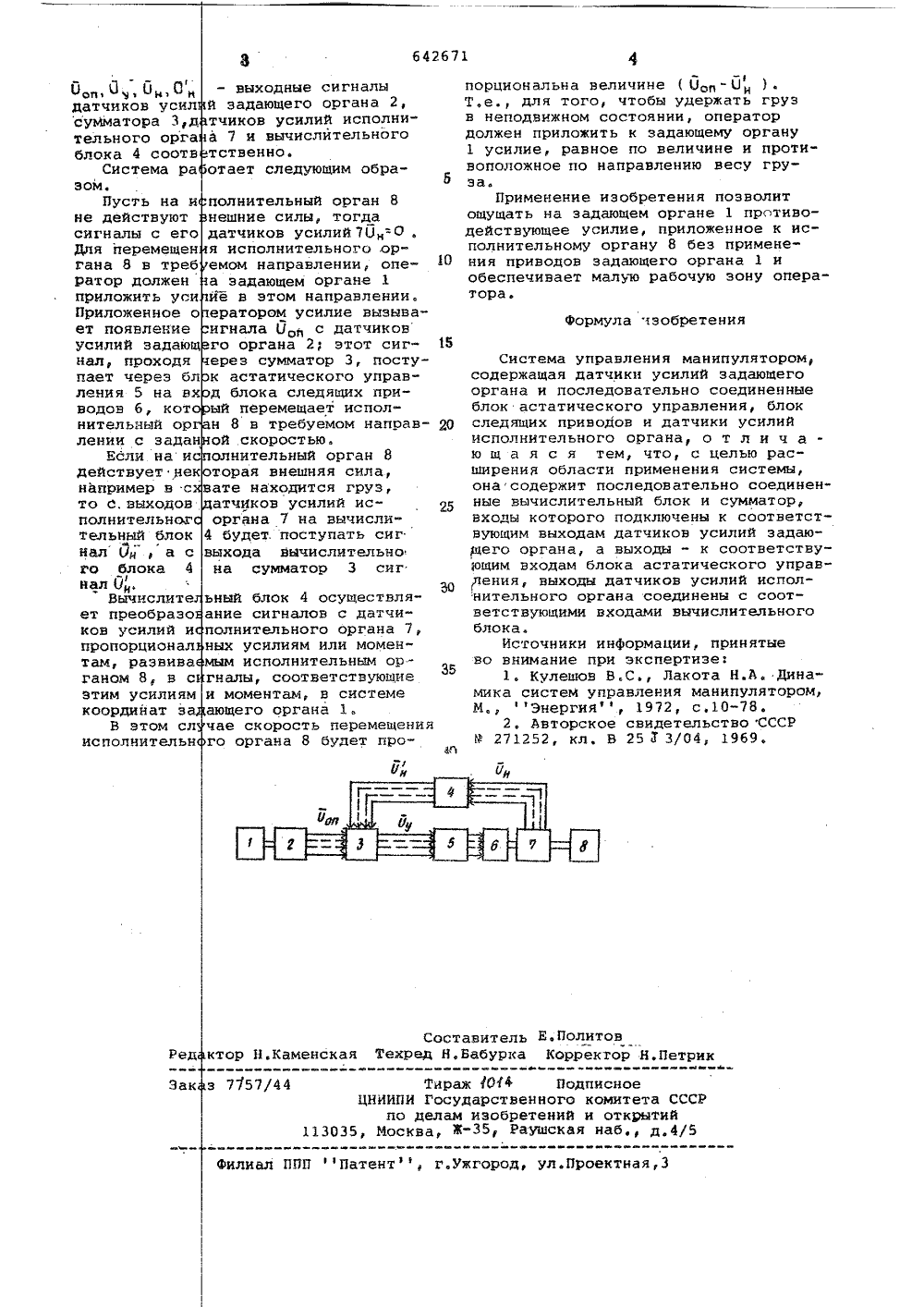
ОПИСАНИЕ ИЗОБРЕТЕНИЯ Сеюз Сеаетсвп Сециапистииееммк Реепубюепо велас нзобретени н открытий(088.8) 72) Авторы изобретения С.КУ В.Андрюн в С,А.ЛысенВ,Н.Шведов О)с.с; ссОрдена Ленина и ордена Трудового Красщна)наменивысшее техническое училище имени Н.Э.Баумана 1) Заявитель СИСТЕМА УПРАВЛЕНИЯ ИАНИПУЛЯТОРО н п к позволяе полнител с помощь го орган рабочую ие 1 ерем Изобретение относится к области манипуляторостроения и может быть использовано при создании универсал 1. ных промышленных или специализирован ных манипуляторов.Известна сисгема управления манипуляторами, содержащая кннематически подобные эадаюцие и исполнительные устройства с индивидуальньвщ приводами звеньев и систему управления каждым приводом. Такая система имеет громоздкое задающее устройство, требующее соответствуюцего пространства для своих перемещений, что ограничивает область применения этой систе- мыЦ.Наиболее близким техническим решением к данному изобретению является система 2, содержащая датчики усилий задающего органа и последовательно соединенные блок астатического управления, блок следящих приводов и датчики усилий исполнительного органа.Эта система т управлять перемещением ис ьного органа в пространстве ю малых перемещений задаюце а, т,е. обеспечивает малую зону оператора. Направлен ещения испол. ительного органа соответствует наранлению перемецения задающего органа, а скорость пропорциональна нели- чине перемещения задающего органа. Однако, в этой системе невозможно ощущение оператором на задающем органе усилиЯ, действующих на исполнительном органе, что снижает эффективность работа оператора.Целью изобретения является расширение области применения системы.Это достигается тем, что предлагаемая система содержит последовательно соединенные вичислительный бло и сумматор, входы которого подключены к соответствующим выходам датчиков усилий задающего органа, а выходы - к соответствующим входам блока астатического управления, выходы датчикон усилия исполнительного органа соединены с соответствующими вхо" дами вычислительного блока.На чертеже представлена блок-схема предлагаемой системы, где 1 - задаю" щий орган, 2 - датчики усилий задающего органа,З - сумматор, 4 - вычислительный блок, 5 - блок астатического управления, б - блок следяцих приводов, 7 - датчики усилий исполнительного органа, 8 . - исполнительный орган,642671 выходные сигналый задающего органа 2,тчиков усилий исполниа 7 и вычислительноготственно.отает следующим обраБ полнительный орган 8нешние силы, тогдадатчиков усилий 7 О =О .я исполнительного оремом направлении, опеа задающем органе 1ие в этом направлении.ератором усилие нызываигнала 0с датчиковго органа 2; этот сигерез сумматор 3, постук астатического управд блока следящих приый перемещает исполн 8 в требуемом направ Оой скоростью.олнительный орган 8торая внешняя сила,вате находится груз,атчйков усилий исоргана 7 на нычисли 4 будет. поступать сигвыхода вычислительнона сумматор 3 сиг Формула изобретения ьный блок 4 осуществляание сигналов с датчиполнительного органа 7,ных усилиям или моменмым исполнительным оргналы, соответствующиеи моментамр в системеающего органа 1.чае скорость перемещенияго органа 8 будет проСоставитель Е.Политовктор Н.Каменская Техред Н.Бабурка Корректор Н,Петрик Ред Тираж Ю 1 р НИИПИ Государств по делам изобр Москва, Жр Рз 7757/4 Подписноенного комитета СССРтений и открытийушская наб д,4/5 035 илиал ППП Патент, г.ужгород, ул.Проектная,З 1)от з Зма а ндатчиков усилсумматора З,дтельного оргаблока 4 соотвСистема разом.Пусть на ине действуютсигналы с егоДля перемещенгана 8 в требратор долженприложить усиПриложенное оет появлениеусилий задающнад, проходяпает через блленин 5 на нхнодон 6, котнительный орленни с заданЕсли на исдействует некнапример в сто с. выходовполнительногтельный блокнад Ор а сго блока 4иал 4Вычислитеет преобразоков усилий ипропорционалтам, раэнивагано 8,этим усилиямкоординат эВ этом слисполнительн порциональна величине ( бс,- Йн ) . Т,е., для того, чтобы удержать груз в неподвижном состоянии, оператор должен приложить к задающему органу 1 усилие, равное по величине и противоположное по направлению весу груза.Применение изобретения позволит ощущать на задающем органе 1 противодействующее усилие, приложенное к исполнительному органу 8 без применения приводов задающего органа 1 и обеспечивает малую рабочую зону оператора. Система управления манипулятором, содержащая датчики усилий задающего органа и последовательно соединенные блок астатического управления, блок следящих принодон и датчики усилий исполнительного органа, о т л и ч аю щ а я с я тем, что, с целью расширения области применения системы, она содержит последовательно соединен" ные вычислительный блок и сумматор, входы которого подключены к соответствующим выходам датчикон усилий задающего органа, а выходы - к соотнетстнуЮщим входам блока астатического управ,ления, ныходы датчиков усилий исполнительного органа соединены с соответствующими входами вычислительного блока.Источники информации, принятые но внимание при экспертизе:1, Кулешов В.Сар Лакота Н.А. Динамика систем управления манипулятором, Мар Энергия р 1972 р са 10 78 а2, Авторское свидетельство СССР В 271252, кл, В 25 Т 3/04, 1969,
СмотретьЗаявка
2514618, 29.07.1977
ОРДЕНА ЛЕНИНА И ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ВЫСШЕЕ ТЕХНИЧЕСКОЕ УЧИЛИЩЕ ИМ. Н. Э. БАУМАНА
АНДРЮНИН ВАЛЕРИЙ ВИКТОРОВИЧ, КУЛЕШОВ ВЛАДИМИР СЕРГЕЕВИЧ, ЛЫСЕНКО СЕРГЕЙ АРКАДЬЕВИЧ, МОИСЕЕНКОВ ВАЛЕРИЙ АКСЕНТЬЕВИЧ, ШВЕДОВ ВАЛЕРИЙ НИКОЛАЕВИЧ
МПК / Метки
МПК: G05B 11/01
Метки: манипулятором
Опубликовано: 15.01.1979
Код ссылки
<a href="https://patents.su/2-642671-sistema-upravleniya-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления манипулятором</a>
Устройство для измерения осевых усилий в редукторе исполнительного органа горного комбайна

Номер патента: 124685
Опубликовано: 01.01.1959
Автор: Долгов
МПК: F16H 57/02, G01L 1/04
Метки: горного, исполнительного, комбайна, органа, осевых, редукторе, усилий
...корпуса редуктора и восприятие им и датчиками осевого усилия с меньшими погрешностями.На чертеже изображено предлагаемое устройство в разрезах.Для рамщ устроиства испозоа опорный подшипшкозып корпус 1 редуктора 2 исполнительного органа. Осевое усилие Р воспринимается коронкой 3 и передается через ряд деталей подшипниковому корпусу, снабженному на внутренней своей поверхности рядом радиальных проточек 4. На поверхности корпуса, симметрично относительно его центра, размещены укрепленные на нем колодки 5 с продольными пазами, в которые вставлены пластинки 6, несущие датчики проволочного сопротивления. С целью плавного изменения прогиба упругой пластинки и соответствующей настройки корпуса, упругие пластинки размещены в продольных пазах...
Логический блок для управления исполнительным механизмом

Номер патента: 960733
Опубликовано: 23.09.1982
Авторы: Калиниченко, Конотоп
МПК: G05B 19/04, H02P 7/20
Метки: блок, исполнительным, логический, механизмом
...триггер 9, входные выводы10 " 13 сигналов запуска команд,входные выводы 14 - 17 для подключения датчиков путевого и моментногоограничения, входной вывод 18 сигна ла сброса, выходные выводы 19-20команд управления каналов, выходнойвывод 21 цепи сигнализации.Логический блок управления работает следующим образом.Вентили 1 и 2 осуществляЮт операцию совпадения входных сигналов низкого уровня. Чаличие входных и выходных сигналов на каждом выводесоответствует высокому уровню напряжения. Для появления сигнала на выводе 19 необходимо подать напряжение на любой вывод 10 или 11. Присрабатывании датчика путевого илимоментного ограничения на одном извыводов 14 и 15 появится сигнал,по которому формирователь 5 сигналазапрета вырабатывает на...
Блок задающих механизмов манипуляторов, преимущественно для дистационного управления движениями литейного ковша

Номер патента: 969455
Опубликовано: 30.10.1982
МПК: B22D 35/04, B25J 13/02
Метки: блок, движениями, дистационного, задающих, ковша, литейного, манипуляторов, механизмов, преимущественно
...упоры 15 и кронштейн 16. На оси 17 установлена ручка 18 с ребром 19, имитирующим эаливочный ковш с носком 20. Ручка с реб-, оом имеет форму, которая наиболееудобна для захвата ее одной рукой и производства различных движений. Коническая шестерня 21 входит в эа" цепление с конической шестерней 13.К тележке б при помощи кронштейна. 22 закреплен эацающий механизм 5 манипулятора 23 со штоком 24 и скобой 25. Движение скобы и штока осуществляется от движения шпицевого , вала 11 через вилку 26. К столу 1 при помощи кронштейна 27 закреплен 10 задающий механизм манипулятора 28. Движение скоба и шток получают от пронода 29, который закреплен на тележке 3 и свободно проходит по прорезу в столе 1. На тележке б на.крон штейнах 30 и 31...
Устройство для определения величины усилия резаиия рабочего органа роторного экскаватора

Номер патента: 252937
Опубликовано: 01.01.1969
Автор: Поль
Метки: величины, органа, рабочего, резаиия, роторного, усилия, экскаватора
...соответствующих мостов и питанием последних от отдельных источников тока. Касательная составляющая измеряется мостами 30, питаемыми от источников тока 32, а радиальная - мостами 31, питаемыми от источников 33.Учет по каждой составляющей веса ковша, который может достигать оО - 60% от усилия резания, обеспечивается сложением напряжения, выдаваемого измерительными мостами, с напряжением на сопротивлениях 34 или 35, включенных последовательно с мостами и в цепь синусного движка потенциометра Зб для касательной составляющей, или в цепь косинусного движка для радиальной составляющей.Движки потенциометра Зб вращаются согласованно с мерным ковшом, корпус поворачивается на угол наклона стрелы, и напряжения на сопротивлениях 34 или 35, равные...
Устройство для бесконтактной связи датчика на маятниковом блоке с каротажным кабелем

Номер патента: 1182158
Опубликовано: 30.09.1985
Авторы: Афанасьев, Никитин, Орлов
МПК: E21B 47/12
Метки: бесконтактной, блоке, датчика, кабелем, каротажным, маятниковом, связи
...упора 5 маятникового блока и далее грузы 13 и 14 вращаются вместе с маятниковым блоком под действием веса груза 13, при этом маятниковый блок поворачивается на угол К 1 и выходит из состояния ориентирования (фиг.б), начинается раскручивание токоотводов. При этом грузы 13 14 и 4 составляют кинематическое звено (фиг.б). Величина груза 13 должна быть выбрана такой, чтобы она обеспечивала вращение не только груза 14, но и маятникового блока, что выполняется при, 25 Р 5 5 ю м 5Р 5 и м ф Рг 5 о м г Предположив, что звено остается жестко связанным при всех значениях углов М 1, М 7, М 5, можно определить 30 угол К 7 Р, при котором грузы находятся в состоянии равновесия1 г, РР 5 а Р 5р, рР 5 со 5 в -Рг Р со 5 -Отсюда йР 5 - Р 2 р 2- Рг-Р соз -2...
Предыдущий патент: Корпус для электронных наручных часов
Следующий патент: Регулятор давления
Случайный патент: Устройство для прижатия конвейерной ленты к барабану