Устройство для программного управления промышленным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
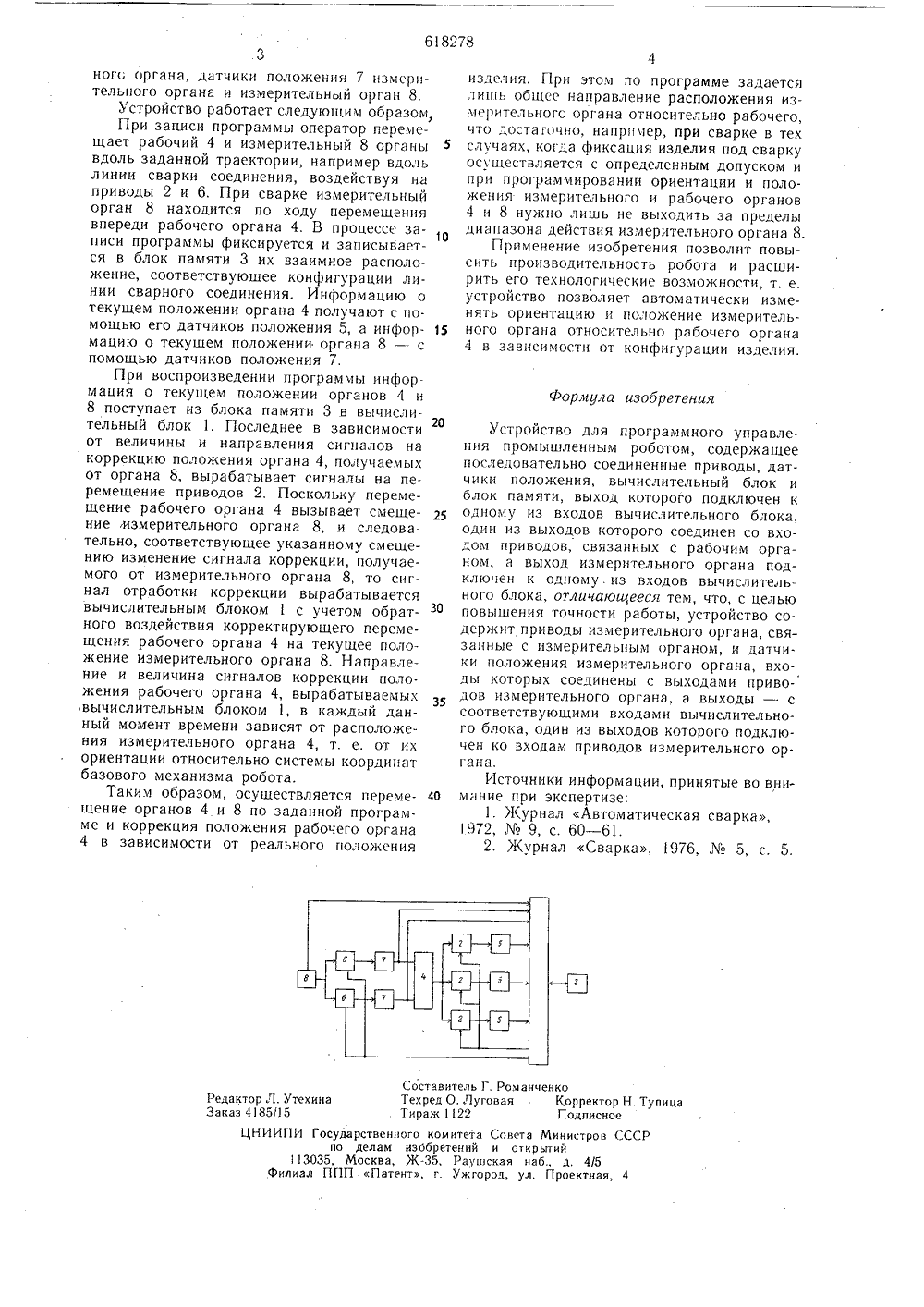
Союз СоветскихСоциалистическихРеспублик ОП ИСАНИЕИЗОБРЕТЕН ИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ/О присоединением заявки3) Приоритет осудврственныи камитетСовета Министров СССРва делам изоаретеннйи Открытий, Сергацкий и Г инкин иевский институт автоматики им. 25 съезда КИнститут электросварки им. О, Е. Патона АН(71) Заявители раинской ССР 4) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИ ПРОМЫШЛЕННЫМ РОБОТОМ поз его оло сва/ ам очн Изобретение относится к устройствам программного управления многокоординатным оборудованием и может быть использовано при создании систем управления промышленным роботом, например, при дуговой сварке по контуру.Известно устройство для программного управления промышленным роботом 11, содержащее блок памяти, блок коммутации, блок сравнения, приводы, датчики положения и рабочий орган.Однако такое устройство не воляет 10 корректировать положение рабоч органа в зависимости от реального п жения изделия.Наиболее близким техническим решением к изобретению является устройство 12, содержащее последовательно соединенные приводы, датчики положения, вычислительный блок и блок памяти, выход которого подключен к одному из входов вычислительного блока, один из выходов которого соединен со входом приводов, связанных с рабочим органом, а выход измерительного органа под-. ключен к одному из входов вычислительного блока.В и ие звестном устройстве перемещен головки осуществляется по пр ме и корректируется в зависимости от реального положения изделия. Коррекция осуществляется с помощью двух датчиков, закрепленных на рабочем органе и расположенных под углом 45 в плоскости, перпендикулярной направлению движения. Однако во время коррекции рабочего органа изменяется взаимное расположение измерительного и рабочего органов, что приводит к необходимости ручной перестановки измерительного органа и снижает точность сварки,Целью изобретения является повышение точности работы устройства.С этой целью предложенное устройство содержит приводы измерительного органа, связанные с измерительным органом, и датчики положения измерительного органа, входы которых соединены с выходами приводов измерительного органа, а выходы - с соответствующими входами вычислительного блока, один из выходов которого подключен ко входам приводов измерительного органа.На чертеже изображена структурная схема устройства.Оно содержит вычислительный блок 1, приводы 2, блок памяти 3, рабочий орган 4, датчики положения 5, приводы 6 измеритель618278 Фор иула изобретения Составитель Г. Романченко Редактор Л. Утехина Техред О. Луговая Корректор Н. Тупица Заказ 485/15 Тираж 1122 Подписное ЦНИИПИ Государственного комитета Совета Министров СССР по делам изобретений и открытий 13035, Москва, Ж.35, Раушская наб., д. 4/5 Филиал ППП Патент, г. Ужгород, ул. Проектная, 4ного органа, датчики положения 7 измерительного органа и измерительный орган 8.Устройство работает следующим образом, При записи программы оператор перемешает рабочий 4 и измерительный 8 органы 5 вдоль заданной траектории, например вдоль линии сварки соединения, воздействуя на приводы 2 и б. При сварке измерительный орган 8 находится по ходу перемешения впереди рабочего органа 4, В процессе за 0 писи программы фиксируется и записывается в блок памяти 3 их взаимное расположение, соответствующее конфигурации линии сварного соединения, Информацию о текущем положении органа 4 получают с помощью его датчиков положения 5, а инфор мацию о текущем положении органа 8 - с помощью датчиков положения 7.При воспроизведении программы информация о текущем положении органов 4 и 8 поступает из блока памяти 3 .в вычислительныи блок 1. Последнее в зависимости20 от величины и направления сигналов на коррекцию положения органа 4, получаемых от органа 8, вырабатывает сигналы на перемешение приводов 2, Поскольку перемешение рабочего органа 4 вызывает смеше ние измерительного органа 8, и следовательно, соответствующее указанному смешению изменение сигнала коррекции, получаемого от измерительного органа 8, то сигнал отработки коррекции вырабатывается вычислительным блоком 1 с учетом обратного воздействия корректирующего перемещения рабочего органа 4 на текущее положение измерительного органа 8, Направление и величина сигналов коррекции положения рабочего органа 4, вырабатываемых вычислительным блоком 1, в каждый данный момент времени зависят от расположения измерительного органа 4, т. е. от их ориентации относительно системы координат базового механизма робота.Таким образом, осуществляется переме шение органов 4 и 8 по заданной программе и коррекция положения рабочего органа 4 в зависимости от реального положения изделия. При этом по программе задается лишь общее направление расположения измерительного органа относительно рабочего, что достагочно, например, при сварке в тех случаях, когда фиксация изделия под сварку осуществляется с определенным допуском и при программировании ориентации и положения измерительного и рабочего органов 4 и 8 нужно лишь не выходить за пределы диапазона действия измерительного органа 8.Применение изобретения позволит повысить производительность робота и расширить его технологические возможности, т, е. устройство позволяет автоматически изменять ориентацию и положение измерительного органа относительно рабочего органа 4 в зависимости от конфигурации изделия,Устройство для программного управления промышленным роботом, содержащее последовательно соединенные приводы, датч ики положения, вычислительный блок и блок памяти, выход которого подключен к одному из входов вычислительного блока, один из выходов которого соединен со входом приводов, связанных с рабочим органом, а выход измерительного органа подключен к одному . из входов вычислительного блока, отличающееся тем, что, с целью повышения точности работы, устройство содержит приводы измерительного органа, связанные с измерительным органом, и датчики положения измерительного органа, входы которых соединены с выходами приводов измерительного органа, а выходы - с соответствующими входами вычислительного блока, один из выходов которого подключен ко входам приводов измерительного органа.Источники информации, принятые во внимание при экспертизе:1. Журнал Автоматическая сварка, 972,9, с. 60 - 61.2. Журнал Сварка, 1976,5, с. 5.
СмотретьЗаявка
2458940, 01.03.1977
КИЕВСКИЙ ИНСТИТУТ АВТОМАТИКИ ИМ. 25 СЪЕЗДА КПСС, ИНСТИТУТ ЭЛЕКТРОСВАРКИ ИМ. О. Е. ПАТОНА АН УКРАИНСКОЙ ССР
СЕРГАЦКИЙ ГЕОРГИЙ ИВАНОВИЧ, ЛИНКИН ГЕННАДИЙ АНДРЕЕВИЧ
МПК / Метки
МПК: B25J 9/00
Метки: программного, промышленным, роботом
Опубликовано: 05.08.1978
Код ссылки
<a href="https://patents.su/2-618278-ustrojjstvo-dlya-programmnogo-upravleniya-promyshlennym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления промышленным роботом</a>
Механизм привода крышки блока магнитных головок

Номер патента: 1030848
Опубликовано: 23.07.1983
МПК: G11B 5/10
Метки: блока, головок, крышки, магнитных, механизм, привода
...пружины, рычага и тяги. Необходимость дополнительного сжатия возвратной пружины увеличивает нагрузку иа привод, что заставляет увеличивать его мощность. Целью изобретения является упрощение конструкции. Указанная цель дости"ается тем,что в механизме привода крышки блока магнитных головок, содержащем установленную на оси перед экраном с магнитной головкой экранирующую крышку и стойку отвода магнитной ленты, связанную с приводом перемещения, введена упругая Ч-образнаятяга, шарнирно соединяющая экраниру Предлагаемое устройство по сравнению с известным обеспечивает повышение надежности работы блока маг-. нитных головок эа счет введения упругой Ч-образной тяги, шарнирно со 5 О 15 20 25 30 35 40 45 50 55 60 щую крышку со стойкой отвода...
Привод прядильного блока

Номер патента: 1557206
Опубликовано: 15.04.1990
Авторы: Матвеев, Сокол, Шнайдер
МПК: D01H 1/24
Метки: блока, привод, прядильного
...5 при его вращении, что обеспечивает работоспособность привода прядильного блока при произвольном положении оси вращения ротора 1. Зона втулки 5, при. легающая к магнитопроводу статора и содержащая пазы, совпадающие по направлению и длине с пазами статора, Функционально эквивалентна мгнитным клиньям в пазах статора, ослабляющим создаваемые высокими гармониками зубцовые поля статора, повышающим равномерность вращения ротора 1 и КПД привода прядильного блока. Зоны втулки 5, выступающие за пределы пакета 3 статора, Функционально эквивалентны торцовым ферромагнитным кольцам и шунтируют торцовые потоки рассеяния, что также способствует обеспечению равномерности вращения ротора 1 и повышению КПД привода .Поскольку длина втулки 5 равна...
Блок рабочих колес центробежного насоса

Номер патента: 1652666
Опубликовано: 30.05.1991
МПК: F04D 29/20
Метки: блок, колес, насоса, рабочих, центробежного
...б для осевойфиксации колес 1, 2 с наружным диаметром, равным внутреннему диаметруступиц 3, 4, навернутую на резьбовойхвостовик 7 вала 5. С внутренней стороцы ступицы каждого последующегоколеса 2 выполнена кольцевая расточка 8 для посадки ца ступицу 3 предыдущего колеса 1, при этом в ступице3 каждого предьдущего колеса 1 выполботле колеПри ок рабочих лщеции влил 5 браз м крутяь 1 дующимпри,ода оик е моме оч е е колесо 1шарик 1 рабочее передается и плзл 9 О - нл э стен ерстия лее черекрая отв кол х колес, посл ность рлбоч дке обесеииой посадкой очностью до зазора ся непосредгргеточкои 8 печива иа ступицу 3.осевую фиксаци колесаГайка 6колес и обеспечивлг застопорена еса э нтрировлнияг отвинчивация и точ 1 вы окострукция м кол обжат а...
Блок рабочих инструментов штампа для резки профильного материала

Номер патента: 998011
Опубликовано: 23.02.1983
Авторы: Ермилов, Загородный
МПК: B23D 23/00
Метки: блок, инструментов, профильного, рабочих, резки, штампа
...нижняя часть каждого вкладыша снабжена подпружиненным плунжером, размещенным в горизонтальной плоскости параллельно плоскости разделения, и упором, расположенным параллельно его клиновой поверхности и подвижно связанным с верхней частью этого вкладыша.На фиг. 1 изображен один из инструментов блока, разрез; на фиг. 2 - разрез А - А на фиг. 1.Блок рабочих инструментов штампа для резки профильного материала, преимущественно крестообразного сечения, содержит основной и дополнительный инструменты, расположенные по обе стороны относительно плоскости разделения, каждый из которых выполнен из двух клиновых вкладышей,998011 20 Формула изобретения ль В. Шебалс КоГ 1 о Состави 1 Текред И. Ве Тираж04 ИПИ Государственного по делам изобретений...
Механизм управления высотным положением ножевого рабочего органа

Номер патента: 589342
Опубликовано: 25.01.1978
Авторы: Егоров, Корелин, Кудиш, Кузин, Файнзильбер
МПК: E02F 5/10
Метки: высотным, механизм, ножевого, органа, положением, рабочего
...управления и повышение его точности.Это достигается тем, что поворотные лопасти и гидроцилиндр их поворота смонтированы в каретке, установленной с возможностью перемещения на ножевом рабочем органе и шарнирно связанной с ним при помощи силового цилиндра.На фиг. 1 изображен механизм управления высотным положением ножевого рабочего органа, вид сбоку; на фиг. 2 - разрез по А - А на фиг. 1.Ножевой рабочий орган 1 в своей задней части снабжается направляющими 2, на которых с помощью, например, катков 3 и гидроцилиндра 4 может перемещаться каретка 5.Гидроцилиндр 4 соединен с рабочим органом 1, а его шток - с кареткой 5. На каретке 5 на оси 6 установлены лопасти 7, Поворот оси 6 с лопастями 7 производится гидроцилиндром 8, соединенным с...
Предыдущий патент: Шлифовальный круг
Следующий патент: Устройство для управления адаптивным роботом
Случайный патент: Устройство для пневматической обработки почвы