Способ формирования управляющего воздействия
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 392459
Автор: Шкир

Текст
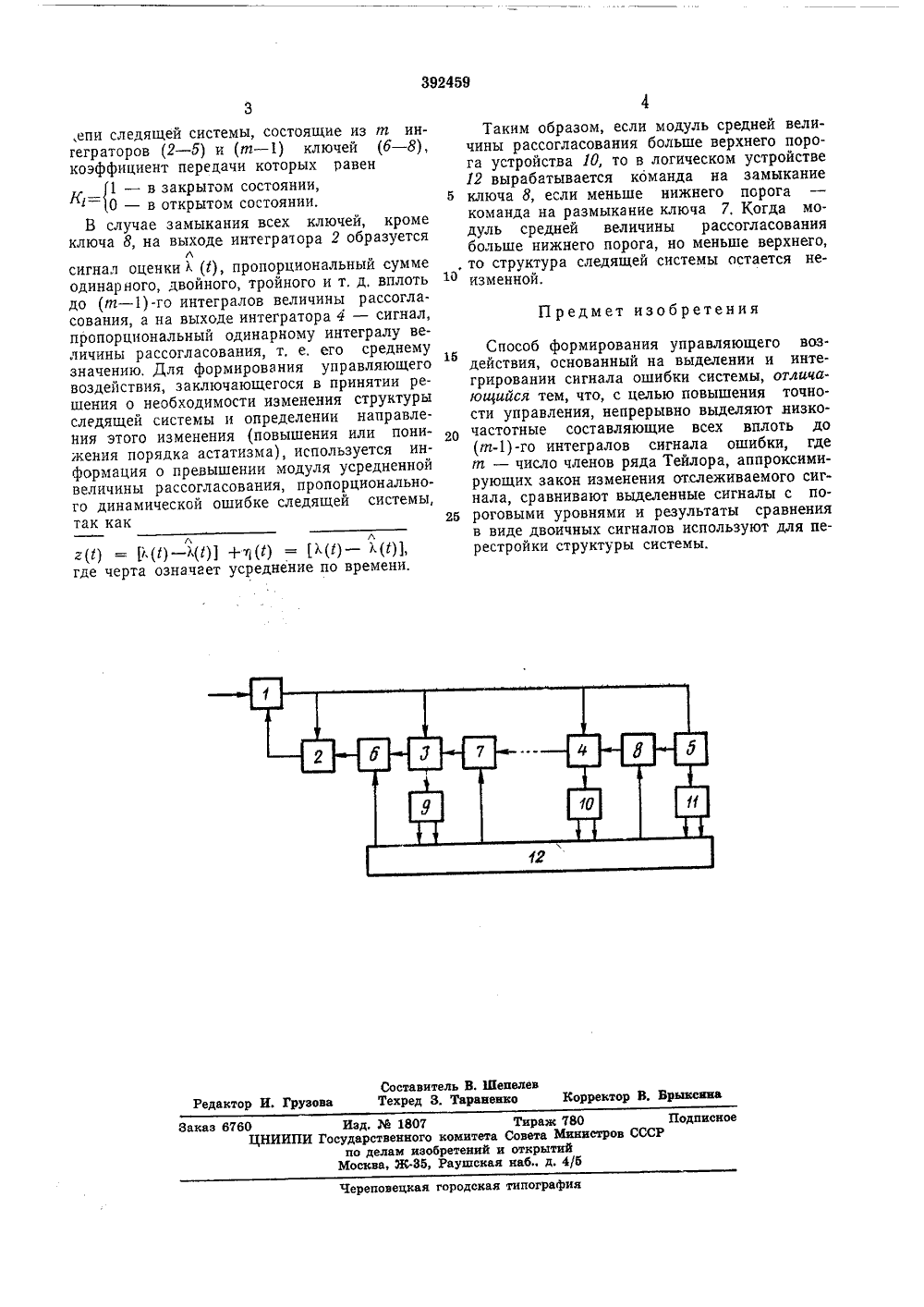
ОПИСАНИЕ ИЗОБРЕТЕН ИЯ 459 союз Савве СецналистнчеРэзублик К АВТОУСКРМУ СВИДЕТЕЛЬСТВУ Зависимое от авт. етельства-11.1970 ( 1603354/18-24) М. Кл. б 05 Ь 13/02 аявлен с присоединением заявки-Приоритет -Опубликовано 27.711.1973. Бюллетень3Дата опубликования описания 15.Х 1,1973 Гвеудврвтвеемй квмвтетСвввта Мееетреа СССРвв делам изебретеннйи еткрытий ДК 621.3.078(088.8) Авторизобретен В. В. Шкирятов Заявител ПОСО 6 ФОРМИРОВАНИЯ УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВ 2пектральной плотность игнала из помех сМо равна т где Л мирующих интервалеОптима иметь аст ледящая система должнат+1) -го порядка,ьная тизм не известно а т, которое и следящей вии нестациличные закоервалах врено быть развыделяемого зо Изобретение относится к области автоматического управления и может быть использовано при динамическом согласовании структуры следящей системы высокого порядка астатизма с нестационарным входным сигналом.Известны способы формирования управляющего воздействия, основанные на выделении и интегрировании сигнала ошибки системы.При реализации известных способов и представлении отслеживаемого сигнала в виде Рфс-я производная функции(1); о членов ряда Тейлора, аппроксизакон изменения сигнала Л (1) на Однако практически никогда необходимое число членов ряд нужно учитывать для реализаци системы, поскольку при воздейст онарного сигнала, имеющего раз ны изменения на различных инт мени, число членов ряда т долж ным, так как дисперсия ошибки 2 +1о(Т) = У,ТРеализация известных способов формирования управляющего воздействия в этих условиях не обеспечивает достаточной точности управления.Цель изобретения - повышение точности управления.Это достигается тем, что непрерывно выделяют низкочастотные составляющие всех вплоть до (щ - 1) -го интегралов сигнала ошибки, сравнивают выделенные сигналы с пороговыми уровнями и результаты сравнения в виде двоичных сигналов используют для перестройки структуры системы,На чертеже показана блок-схема следящей системы высокого порядка астатизма, поясняющая предлагаемый способ.Она содержит дискриминатор 1, интеграторы 2 - б, ключи 6, 7 и 8, пороговые устройства 9, 10 и 11 и логическое устройство 12,Входной сигнал )(1) с помехой (1) поступает на дискриминатор 1, куда одновременно подается сигнал оценки(1).Выходной сигнал дискриминатора г(1), пропорциональный величине рассогласованияЛ - Л(1), поступает в сглаживающие392459 Предмет изобретения Составитель В. ШепелевТехред 3. Тараненко Корректор В, Брыксина Редактор И. Грузова Заказ 6760 Изд. М 1807 Тираж 780 Подписное ЦНИИПИ Государственного комитета Совета Министров СССР по делам изобретений и открытий Москва, Ж-Зб, Раушская набд. 4/б,епи следящей системы, состоящие из т ингеграторов (2 - 5) и (т - 1) ключей (б - 8), коэффициент передачи которых равен К=/1 - в закрытом состоянии,10 - в открытом состоянии.В случае замыкания всех ключей, кроме ключа 8, на выходе интегратора 2 образуетсяЛсигнал оценки(1), пропорциональный сумме одинарного, двойного, тройного и т, д, вплоть до (т - 1) -го интегралов величины рассогласования, а на выходе интегратора 4 - сигнал, пропорциональный одинарному интегралу величины рассогласования, т, е. его среднему значению. Для формирования управляющего воздействия, заключающегося в принятии решения о необходимости изменения структуры следящей системы и определении направления этого изменения (повышения или понижения порядка астатизма), используется информация о превышении модуля усредненной величины рассогласования, пропорционального динамической ошибке следящей системы, так какг = Р - Ч) +чР) = Р - Ю)1 где черта означает усреднение по времени. Таким образом, если модуль средней величины рассогласования больше верхнего порога устройства 10, то в логическом устройстве 12 вырабатывается команда на замыкание б ключа 8, если меньше нижнего порогакоманда на размыкание ключа 7, Когда модуль средней величины рассогласования больше нижнего порога, но меньше верхнего, , то структура следящей системы остается неизменной. Способ формирования управляющего воздействия, основанный на выделении и интегрировании сигнала ошибки системы, отличающийся тем, что, с целью повышения точности управления, непрерывно выделяют низкочастотные составляющие всех вплоть до (и) -го интегралов сигнала ошибки, где т - число членов ряда Тейлора, аппроксимирующих закон изменения отслеживаемого сигнала, сравнивают выделенные сигналы с по 2 б роговыми уровнями и результаты сравненияв виде двоичных сигналов используют для перестройки структуры системы.
СмотретьЗаявка
1603354
В. В. Шкир тов
МПК / Метки
МПК: G05B 13/02
Метки: воздействия, управляющего, формирования
Опубликовано: 01.01.1973
Код ссылки
<a href="https://patents.su/2-392459-sposob-formirovaniya-upravlyayushhego-vozdejjstviya.html" target="_blank" rel="follow" title="База патентов СССР">Способ формирования управляющего воздействия</a>
Способ формирования управляющего воздействия

Номер патента: 484500
Опубликовано: 15.09.1975
Авторы: Баскаков, Латышев, Тараев
МПК: G05B 19/04
Метки: воздействия, управляющего, формирования
...формирования управляющего воздействия, заключающийся в том, что сигнал управления текущего цикла формируют по величине сигнала истинного состояния объекта в начале текущего цикла и величине сигнала заданного состояния объекта на конец текущего цикла. Управляющее воздействие формируется с ошибкой, обусловленной временем запаздывания момента его формирования относительно момента получения сигнала истинного состояния объекта. Эта ошибка пропорциональна времени запаздывания и скорости объекта.Целью изобретения является повышение точности формирования управляющего воздействия. Для этого по предлагаемому способу дополнительно формируют сигнал, ггропорциональный времени запаздывания сигнала управления текущего цикла относительно сигнала...
Устройство для формирования управляющих воздействий

Номер патента: 481866
Опубликовано: 25.08.1975
Авторы: Владычин, Земляков, Сироткин, Таратин
МПК: G01S 9/02
Метки: воздействий, управляющих, формирования
...а,и Р подвижного управляемого объекта П, которыепоступают в блок 1 для преобразованиякоординат, где вырабатываются маршрутные коордйнаты х и Е ,поступающие вблок для сглаживания 2 для ослабления звредного влияния погрешностей измеренияСглаженные значения маршрутных координат х и квыходов блока для сглаживания 2 поступают в вычислитель производных 3 и в блок 4, кроме того, координата Ь,соответствующая боковому отклонению объекта 11 от заданной траекториипоступает в нелинейный преобразователь 8Производные от сглаженных значений зомаршрутных координат х и Й , вырабатываемые в вычислителе производных 3,поступают в блок 4, в вычислитель путе-.вого угла 6 и в нелинейный преобразователь 8. В блоке 4 в соответствии с при- з 5нятым законом...
Устройство для формирования управляющего воздействия следящего привода

Номер патента: 516016
Опубликовано: 30.05.1976
Авторы: Винниченко, Новоселов
МПК: G05B 11/01
Метки: воздействия, привода, следящего, управляющего, формирования
...36 реле 4 запуска.С целью ком пепсации скоростной ошибкии г Ри) Л 13 В с Л с 31 с и Г 1 Я л, и Р 0 и 0 Р и и О 31 Я л ь и 1 Й65 скорост 3 ВКОЛИОГО ВозлеЙсви)1, Э 0 Осмпссст 51601650 55 60 65 влено соединением входа датчика 13 входного воздействия с третьим входом сумматора 19.Работа устройства для формирования управляющего воздействия двухдвигательпого дифференциального следящего привода происходит следуощим образом.Счетно-ресцающий блок 1 по полученным сигналам о требуемых угле наведения, времени Т и требуемой скорости ср дальнейшего движения объекта регулирования в этот момент определяет величину и знак требуемой максимальной скорсти срдвижения и величину модуля максимального ускорения срдвнхсеция; эти величины в виде цапряжеццй...
Способ формирования управляющего воздействия в системах автоматического регулирования

Номер патента: 920632
Опубликовано: 15.04.1982
Авторы: Абрамов, Аксельрод, Зеликин, Кикин, Леонтьев, Нисневич
МПК: G05B 13/00
Метки: воздействия, системах, управляющего, формирования
...ошибки системы, обусловленную наличием интегральной составляющей в законе регулирования.Способ формирования управляющего воздействия в системах автоматического регулирования осуществляется следующим образом. ООпределяют оассогласование между регулируемой величиной и ее заданным значением и интегрируют цолуценное рассогласование, Определяют безынт гральную составляюшую управляющего 5 воздействия на исполнительный орган,Определяют корректирующий сигнал у, как Составитель С. ИсаковРедактор , Товтин Техред А.Бабинец Корректор О. Билак иЗаказ 2338/5 Тираж 908 ПодписноеВНИИПИ Государственного комитета СССРпо делам изобретений и открытий13035, Иосква, Ж, Раушская наб., д, /5 Филиал ППП нПатент г, Ужгород, ул, Проектная,где Л - абсолютная...
Устройство формирования управляющего воздействия следящего привода

Номер патента: 1495742
Опубликовано: 23.07.1989
Автор: Хорьков
МПК: G05B 11/01
Метки: воздействия, привода, следящего, управляющего, формирования
...Формирование текущих прогнозов скорости (выход сумматора 2), ускорения (выход сумматора 5), рывка (выход сумматора б), на прямые входы которых поступают соответственно текущие значения угла (вход сумматора 2), скорости (вход сумматора 5), ускорения (вход сумматора б), а инверсные входы соединены с выходами запоминающих блоков (1 с 2, 14 с 1, 13 с 6).С выхода сумматора 2 на сумматор 10 и на вход блока 7 умножения подается сигнал, равный прогнозу скорости дУ, С выхода. сумматора 5 на вход блока 15 умножения, запоминающего блока 13, сумматора б подается сигнай, равный прогнозу ускорения д 1. С выхода сумматора б на блок 9 умножения подается сигнал, равный прогно- ,зу рывка ДУ. На вторые входы блоков 7-9 и 15 подается сигнал с...
Предыдущий патент: Устройство
Следующий патент: —i библиотека i
Случайный патент: Устройство для снятия или постановки рессор тележки железнодорожного подвижного состава