Устройство формирования управляющего воздействия следящего привода
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1495742
Автор: Хорьков

Текст
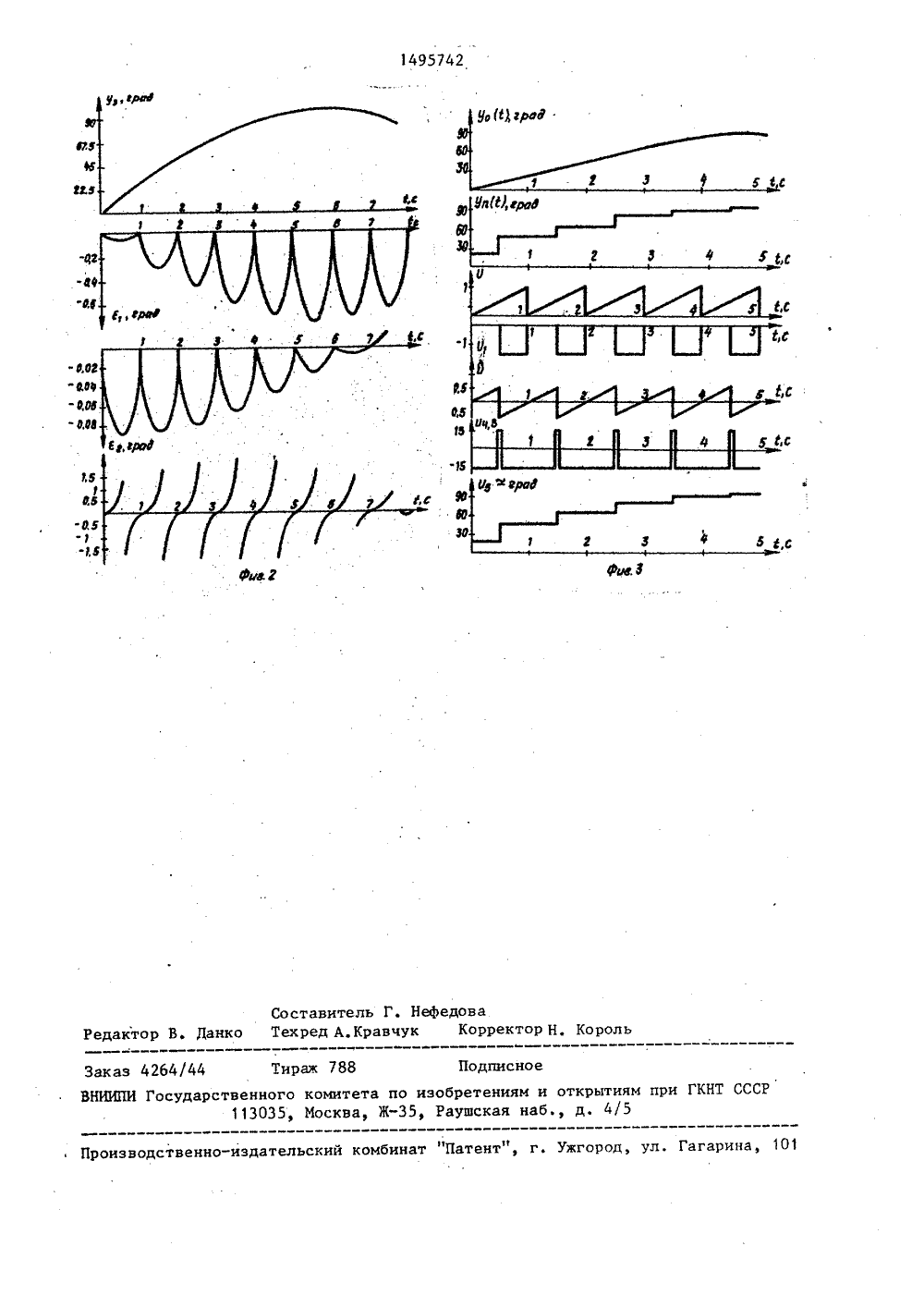
)4 С 05 В 11/01 с и ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯПРИ ГКНТ СССР ИСАНИЕ ИЗО АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(71) Научно-исследовательский ин титут автоматики и электромеханики при Томском институте автоматизированных систем управления и радиоэлектроники(56) Хемминг Р. В. Численные методы. -М.: Наука, 1972.Фильчаков П. Ф. Численные и графические методы прикладной математики. -Киев: Наукова. думка, 1970.Анго А. Математика для электро- и радиоинженеров, в .М.: Наука, 1965.Белянский П. В., Сергеев Б. Г.Управление наземными антеннами и радиотелескопами.-М.; Советское радио, 1980, с. 97, рис. 3.4.(54) УСТРОИСТВО ФОРМИРОВАНИЯ УПРАВ.ЛЯРВЕ ГО ВОЗДЕЙСТВИЯ СЛЕДЯЩЕГО ПРИВОДА(57) Изобретение относится к автоматическому управлению и может бытьиспользовано в системах слежения занаблюдаемыми обьектами, информацияо положении которых имеет больниеинтервалы дискретности по времени,Целью изобретения является повышениединамической точности. Устройствоформирования управляющего воздействия следящего привода содержит запоминающий блок 1, сумматоры 2-6, блоки умножения 7-9, сумматор О, генератор 11 прямоугольных сигналов,блок 12 фиксации нуля, запоминающиеблоки. 13, 14, блок 15 умножения. Поставленная цель обеспечивается Формированием Функции задания управляа3 1495742 ющего сигнала следящего привода,близкой по динамике и траектории дви-.жения объекта в промежутках временипрогнозаза счет введения дополни:тельной информации о прогнозах уско-.рения при Формировании квадратичнойпо времени составляющей и введенииинформации о прогнозах скорости, ускорения и рывка при Формировании 10линейной составляющей суммарйого управляюЩего сигнала следящего привода.роме того, осуществляются стыковка соседних интервалов прогноза, а именно отработанного и вновь заданного,путем Формирования дополнительной последовательности импульсов с частотой равной частоте задания прогнозаугла, отрицательной амплитудой, пропорциональной значению времени прогноза, скважностью 0,5, суммированиеее с сигналом разности текущего начального времени и использование полученного сигнала в основном аналити.ческом выражении. 3 ил, Изобретение относится к областиавтоматического управления и можетбыть использовано в системах слежения за наблюдаемыми объектами, информация о положении которых имеет боль- .г 1 ие интервалы дискретности по времени.йЦельй изобретения является повышение дйнамической точности.На фиг, 1 приведена структурнаясхема устройства формирования управляющего сигнала на Фиг. 2 и 3 - временные диаграммы работы предложенного устройства при значении временипрогноза 1 с.Устройство Формирования управляющего воздействия следящего приводасодержит запоминающий блок 1, сумматоры 2 - 6, блоки 7 - 9 умножения,сумматор 10, генератор "11 прямоугольных сигналов, блок 12 Фиксации нуля,запоминающие блоки 13 и 14, блок 15умножения. 40Устройство работает следующим об-разом,На вход устройства Формированияуправляющего.воздействия следящегопривода одновременно в виде напряжений постоянного тока поступают сигналы заданных прогноза угла Бу(1, времени прогноза 111, текущего времени11 , начапьного времени 11, , причемСовремя прогноза может быть различнымпри повторном включе.1 ии устройства.На выходе сумматора 3 формируетсясигнал, равный разности текущего иначального времени (график 11 нафиг. 2), который поступает на сумматор 4, где суммируется с импульснымсигналом прямоугольной Формы (графикО Фиг, 3), поступающим с генератора, управляемого напряжением, пропор 1циональным времени прогноза и имеющим скважность 0,5, отрицательную амплитуду, равную У , и периодом, пропорпфциональным амплитуде сигнала времени прогноза. На выходе сумматора 4 фор- .,лмируется сигнал 11, диаграмма изменения котоого показана на Фиг. 2 (график 11). Блок 12 Фиксации нуляразрешает перезапись (график 11 фиг, 2) информации в запоминающие блоблоки 1, 13 и 14, где хранятся значения предыдущего задания угла (выход блока 1 - график Ь., Фиг, 2), предыдущего значения скорости (выход блока 14), предыдущего. значения ускорения (выход блока 13). В сумматорах 2, 5 и 6 происходит Формирование текущих прогнозов скорости (выход сумматора 2), ускорения (выход сумматора 5), рывка (выход сумматора б), на прямые входы которых поступают соответственно текущие значения угла (вход сумматора 2), скорости (вход сумматора 5), ускорения (вход сумматора б), а инверсные входы соединены с выходами запоминающих блоков (1 с 2, 14 с 1, 13 с 6).С выхода сумматора 2 на сумматор 10 и на вход блока 7 умножения подается сигнал, равный прогнозу скорости дУ, С выхода. сумматора 5 на вход блока 15 умножения, запоминающего блока 13, сумматора б подается сигнай, равный прогнозу ускорения д 1. С выхода сумматора б на блок 9 умножения подается сигнал, равный прогно- ,зу рывка ДУ. На вторые входы блоков 7-9 и 15 подается сигнал с выходалсумматора 4 (11), и нфа выходах блоков Формируются сигналы, равные; дУП на выходе блока 7, агУ 11 на выходег,блока 15, ЗгУЬ на выходе блока 8,14957 5дзУ 11 на выходе блока 9, которыесовместно с сигналом задания углаУ( 1 поступают на сумматор 1 О,причем все сигналы сгруппированы та 5ким образом, что сигналы, которыедолжны складываться. согласно основному аналитическому- выражению, подаются на прямой вход (+) сумматора 10,а сигналы, которые должны вычитаться, подаются на инверсный вход (-)сумматора 1 О. Суммирующие коэффициенты выставляются соответствующимобразом, т.е. на выходе сумматора1 О.имеется сигнал Б. 5Таким образом, использование изобретения позволяет повысить динамическую точность выведения нагрузкиследящего привода на заданный угол.Обеспечивается это Формирование Функции задания управляющего сигнала следящего привода, близкой по динамикеи траектории движения объекта в промежутках времени прогноза,за счетвведения дополнительной информации 25о прогнозах ускорения при Формировании квадратичной по времени составляющей и введении информации о прогнозах скорости, ускорения и рывкапри формировании линейной составляющей суммарного управляющего сигналаследящего привода, а также осуществлением стыковки соседних интерваловпрогноза, а именно отработанного ивновь заданного, путем Формирования35дополнйтельной последовательности импульсов с частотой, равной частотезадания прогноза угла, отрицательнойамплитудой, пропорциональной значениювремени прогноза, скважностью 0,5, 4 Осуммирования ее с сигналом разноститекущего и начального времени и использования полученного сигнала в ос 1новном аналитическом выражении. Приэтом в окрестностях узлов задания управляющие сигналы следящего приводаописываются гладкими Функциями, адинамическая ошибка в узлах заданияпрогноза угла принимает нулевое значение50Формула из обретенияУстройство Формирования управляющего воздействия следящего привода,содержащее. первый запоминающий блок, соединенный вЫходом с входом первого сумматора, о т л и ч а ю щ е е с я тем, что, с целью повышения точности интерполирования дискретных значений воздействий, в него введены последовательно соединенные второй и третий сумматоры, четвертый и,пятый сумматоры, а также первый, второй и третий блоки умножения, выходы котофых соединены с соответствующими входами шестого сумматора, последовательно соединенные генератор прямоугольных сигналов, вход которого является входом времени прогноза устройства, и блок Фиксации нуля, второй и третий запоминающие блоки и четвертый блок умножения, при этом выход генератора прямоугольных сигналов соединен с вторым входом третьего сумматора, первый вход которого соединен с выходом второго сумматора, входы которого являются входами текущего и начального времени устройства, выход которого соединен с первыми входами с первого по четвертый блоков умножения, информационный вход первого запоминающего блока соединен с вторым входом первого сумматора и четвертым входом шестого сумматора и является входом заданного угла прогноза устройства, выход блока Фиксации нуля соединен с управляющими входами первого, второго и третьего запоминающих блоков, выход первого сумматора соединен с информационным входом третьего запоминающего блока, с вторым входом первого .блока умножения, с пятым входом шестого сумматора и с первым входом четвертого сумматора, второй вход которого подключен к выходу третьего запоминающего блока, выход четвертого сумматора соединен с вторым входом четвертого блока умножения и с информационным входом второго запоминающего блока, выход которого через второй вход пятого сумматора соединен с вторым входом третьего блока умножения, а выход четвертого блока умножения соединен с вторым входом второгоблока умножения и с шестым входом шестого сумматора.1495742 ро Заказ 4264/44 Тираж 788 Подписное НИИПИ Государственного комитета по изобретениям и открытиям 113035, Москва, Ж, Раушская наб., д. 4/5 и ГКНТ ССС Гагарина,й 5ее Я Составитель Г. Нефедоваактор В. Данко Техред А.Кравчук Корре зводственно-издательский комбинат "Патент", г. Ужгор
СмотретьЗаявка
4166382, 24.12.1986
НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ АВТОМАТИКИ И ЭЛЕКТРОМЕХАНИКИ ПРИ ТОМСКОМ ИНСТИТУТЕ АВТОМАТИЗИРОВАННЫХ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ
ХОРЬКОВ АЛЕКСАНДР КОНСТАНТИНОВИЧ
МПК / Метки
МПК: G05B 11/01
Метки: воздействия, привода, следящего, управляющего, формирования
Опубликовано: 23.07.1989
Код ссылки
<a href="https://patents.su/4-1495742-ustrojjstvo-formirovaniya-upravlyayushhego-vozdejjstviya-sledyashhego-privoda.html" target="_blank" rel="follow" title="База патентов СССР">Устройство формирования управляющего воздействия следящего привода</a>
Устройство для регистрации времени входа и выхода

Номер патента: 898478
Опубликовано: 15.01.1982
МПК: G07C 9/00
Метки: времени, входа, выхода, регистрации
...17 отображения, блок 18 печати.Блок б управления, блок 8 регистрации, программный блок 12 реализованы на базе микропроцессоров иу 5 перепрограммируемых постоянных запоминающих устройств.При наличии заявки с любого блока 2 считывания, коммутатор 3 последовательно опрашивает и отыскивает блок считывания, в котором содержится код жетона-пропуска. Датчики 1 направления дополняют этот код кодом направления движения (приход на предприятие или уход иэ предприятия). Полученный код через коммута/ тор 3 поступает в приемный регистр 4 и через него в блок 5 контроля кода. Код жетона-пропуска определяет адреса ячеек программного блока 12 и блока 8 регистрации. Если код жетона-пропуска считан верно, то блок б управления считывает код...
Устройство для определения момента повалки конвертора

Номер патента: 977503
Опубликовано: 30.11.1982
Авторы: Авдеев, Айзатулов, Кошелев, Мышляев, Петрунин, Руденков, Соловьев
МПК: C21C 5/30
Метки: конвертора, момента, повалки
...разности подается на вход второго блока 37 умножения, где умножается на выходной сигнал второго блока 36 деления.Сигнал о текущем расходе кислорода ц с выхода блока 12 поступает на интегра 5 10 15 20 25 тор 13, где определяется суммарное количество кислорода, израсходованное на продувку - Я ) (1 - текущий момент времени). В момент окончания продувки по сигналу блока 7 синхронизации замыкается третий ключ 14 и сигнал о Я(1) поступает на вход третьего блока 15 памяти, где запоминается на интервал времени до окончания продувки следующей плавки.Выходной сигнал Я(1 - 1) третьего блока 15 памяти поступает на вход третьего блока 21 сравнения, где из него вычитается сигнал Ьо(1 - 1) с выхода первого блока 20 корректировки расхода кислорода....
Устройство для определения ресурса системы

Номер патента: 1256062
Опубликовано: 07.09.1986
Авторы: Воробьев, Гришин, Самарин
МПК: G07C 3/08
...контролируемой технической системы, которое подается на вход элемента 30 сравнения. На второй вход блока 4 управления подается сигнал запуска, который через элемент И-НЕ 27 проходит на ждущий мультивибратор 28 этого блока, с выхода которого сигнал подается на счетчик 29. Содержимое счетчика 29 поступает на второй вход блока 30 сравнения и на дешифратор 31 блока 4 управления, На одном из выходов 31 появляется д 5 управляющий импульс Б; (где 11,п), Как только содержимое счетчика станет равным , на выходе элемента 30 появляется сигнал запрета, который подается на элемент ЗО И-НЕ 27 и закрывает прохождение на блок 4 управления сигналов запуска. Этот же сигнал запрета одновременно является управляющим сигналом УОчередное значение ;...
Устройство для контроля обезуглероживания сталеплавильной ванны и определения момента повалки конвертора

Номер патента: 1442559
Опубликовано: 07.12.1988
Авторы: Васильев, Карпов, Коноваленко, Махницкий, Мельник
МПК: C21C 5/30
Метки: ванны, конвертора, момента, обезуглероживания, повалки, сталеплавильной
...усилителя 9, производящего,усиление на1 спостоянную величину= 0,304,Мсогде М - молекуляоный вес углерода,равг й 14; М о - молекулярный весСО равный 46,выхода третьего блока 7 умножения значение интенсивности д аэообразования СО поступает на вход второгооперационного усилителя 10, производящего усиление на постоянную величиИсну-- = О 466 где М - молекуМсоВ со 15лярный вес СО, равный 30. С выходовпервого и второго операционных усилителей 9 и 1 О величины поступают напервый и второй входы первого сумматора 11, где суммируются и далее поступают на второй вход первого блока12 умножения, на первый вход которогопоступает значение расхода отходящихгазов, сформированное в блоке 13 Формирования расхода отходящих газов,связанного с...
Формирователь сигналов с угловой модуляцией
Номер патента: 1443195
Опубликовано: 07.12.1988
Авторы: Покровский, Филатов, Шержуков
МПК: H04L 27/10
Метки: модуляцией, сигналов, угловой, формирователь
...(фиг. 2 в). В момент с% достижения заданного в дешифраторе ,16 значения кода (2 -1, где 1 ш), на выходе дешифратора 16 появляется 431954уровень логического нуля, на выходеКБ-триггера 17, а значит и на втором выходе блока 9 управления также 5появляется уровень логического нуля,который запрещает прохождение импульсов с выхода генератора 13 импульсовна вход двоичного счетчика 15 (фиг.2 б).Сигнал с выхода дешифратора 16 такжеустанавливает двоичный счетчик 15 внулевое состояние. На выходе дешифратора 16 устанавливается уровень логической единицы. Блок 9 управленияпереходит в режим ожидания следующего запускающего импульса с выходагенератора 12 запускающих импульсов.Если фазовая функция формируемогосигнала четна (относительно середины...
Предыдущий патент: Устройство для измерения времени задержки импульсов в разночастотных каналах
Следующий патент: Устройство для ограничения частоты вращения двигателя
Случайный патент: Шиберная гидромашина