Устройство для коррекции динамических ошибок в системах автоматического управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 208074
Авторы: Институт, Петровский, Телемеханики
Текст
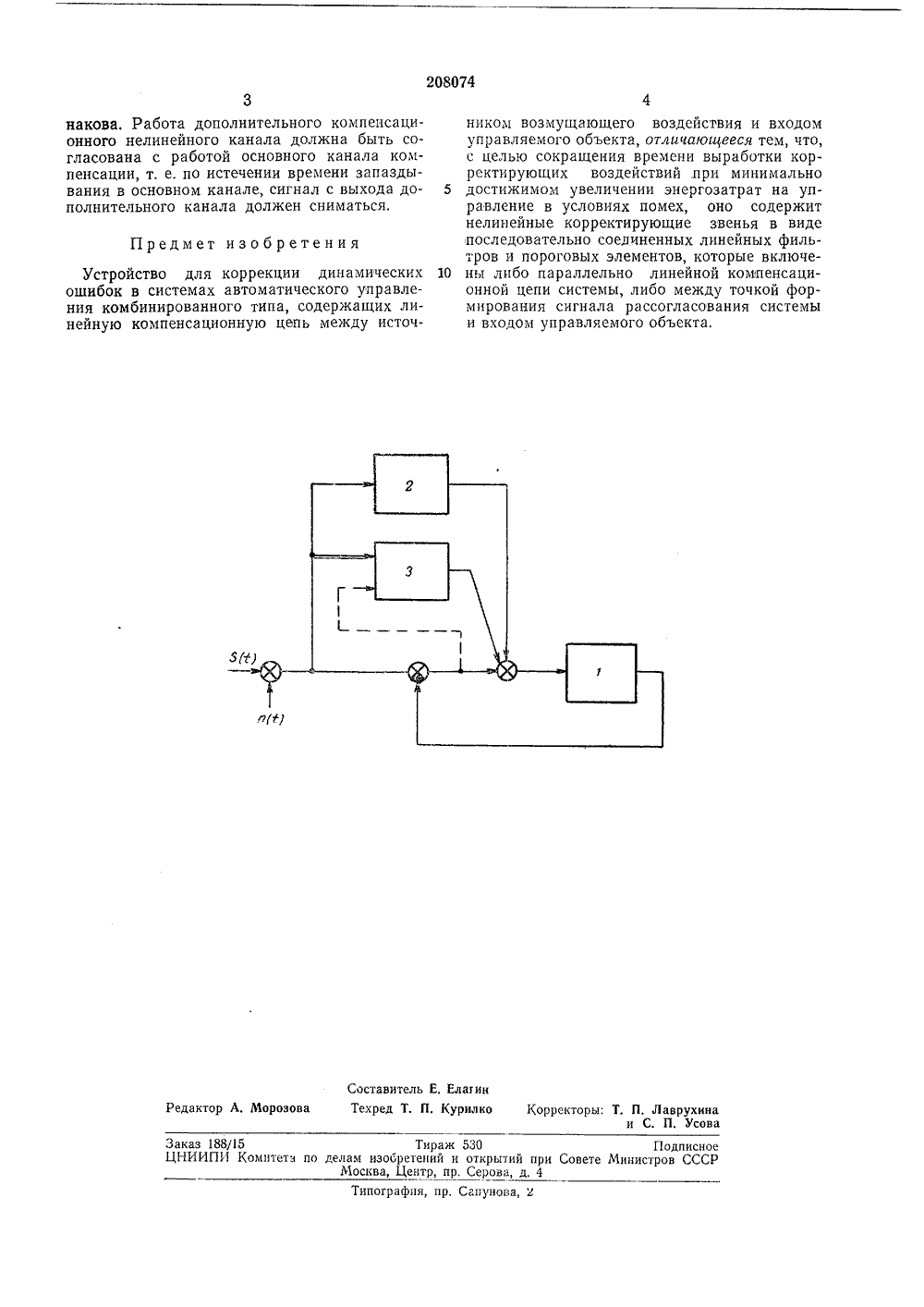
2 О 8074 ОПИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Саюэ Советскиэ Социалиотичвскил РеспубликЗависимое от авт, свидетельстваКл. 21 с, 46/ Заявлено 16.1 Ч.1966 ( 1070046/26-24с присоединением заявкиПриоритет ПК 605 Комитет по делам иэобрвтвний и открытий при Совете Министров СССРйпубликован Дата опубли К 53.088.6;621.3.078 (088,8) 29,Х 1.1967. Бюллетеньвания описания 6.111.1963. М. Петровск Инсти явит втоматики и телемехан УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ ДИНАМИЧЕСКИХШИБОК В СИСТЕМАХ АВТОМАТИЧЕСКОГО УПРАВЛЕН Известны устройства для коррекции динамических ошибок в системах автоматического управления комбинированного типа, содержащих линейную компенсационную цепь между источником возмущающего воздействия и 5 входом управляемого объекта.Предложенное устройство отличается от известных тем, что содержит нелинейные корректирующие звенья в виде последовательно соединенных линейных фильтров и пороговых 10 элементов, которые соединены либо параллельно линейной компенсационной цепи системы, либо между точкой формирования сигнала рассогласования системы и входом управляемого объекта. Это позволило сократить 15 время выработки корректирующих воздействий при минимально возможном увеличении энергозатрат на управление в условиях помех.На чертеже показаны варианты подключения устройства к системе управления. 20Система управления содержит управляемый обьект 1 (для упрощения управляющее устройство в замкнутой цепи объединено с, объектом) и линейную компенсационную цепь 2. На вход системы действуют полезный 25 сигнал з(1) и помеха п. Двойной сплошной, линией показан вариант, при котором устройство 3, представляющее собой последовательно соединенные линейные фильтры и пороговые элементы, подключается к цепи входно го сигнала. В этом случае цепь входного сигнала должна допускать возможность такого подключения. Устойчивость основной системы при этом не изменяется, Этот способ подключения имеет тот недостаток, что наблюдение скачка входного сигнала приходится проводить на фоне основных медленно меняющихся компонент этого сигнала, что заставляет усложнять схему фильтрации. Второй способ подключения (показан пунктиром) основан на очевидном факте, что в начале переходного процесса характер нарастания ошибки рассогласования близок к характеру нарастания самого возмущения, что объясняется инерционностью рассматриваемых систем, В то же время в точке, где наблюдается сигнал рассогласования и куда подключается устройство 3, отсутствуют компоненты установившейся ошибки, что позволяет заметно упростить схему фильтрации. Использование модели управляемой системы может быть рекомендовано в случае, если структура основной системы не позволяет подключение к цепи сигнала рассогласования, а также в силу других возможных причин. При использовании этого способа подключения необходимо дополнительно учитывать требования,к сохранению запасов устойчивости систем в целом.Характеристика переходных процессов для обоих способов подключения в принципе оди.208074 Предмет изобретения Составитель Е. Елагин Редактор А. Морозова Техред Т. П. Курилко Корректоры; Т. П, Лаврухина и С. П, УсоваЗаказ 188/15 Тираж 530 ПодписноеЦНИИПИ Комитета по делам изобретений и открытий при Совете Министров СССРМосква, Центр, пр, Серова, д. 4 Типография, пр. Сапунова, и иакова. Работа дополнительного компенсационного нелинейного канала должна быть согласована с работой основного канала компенсации, т. е. по истечении времени запаздывания в основном канале, сигнал с выхода дополнительного канала должен сниматься. Устройство для коррекции динамических ошибок в системах автоматического управления комбинированного типа, содержащих линейную компенсационную цепь между источником возмущающего воздействия и входом управляемого объекта, отличающееся тем, что, с целью сокращения времени выработки корректирующих воздействий при минимально 5 достижимом увеличении энергозатрат на управление в условиях помех, оно содержит нелинейные корректирующие звенья в виде последовательно соединенных линейных фильтров и пороговых элементов, которые включе ны либо параллельно линейной компенсационной цепи системы, либо между точкой формирования сигнала рассогласования системы и входом управляемого объекта,
СмотретьЗаявка
1070046
А. Петровский, Институт автоматики, телемеханики технической кибврн ики
МПК / Метки
МПК: G05B 5/00
Метки: динамических, коррекции, ошибок, системах
Опубликовано: 01.01.1968
Код ссылки
<a href="https://patents.su/2-208074-ustrojjstvo-dlya-korrekcii-dinamicheskikh-oshibok-v-sistemakh-avtomaticheskogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для коррекции динамических ошибок в системах автоматического управления</a>
Система оптимизации управления непосредственно и косвенно управляемыми объектами

Номер патента: 1080117
Опубликовано: 15.03.1984
Автор: Попов
МПК: G05B 13/02
Метки: косвенно, непосредственно, объектами, оптимизации, управляемыми
...й Ч и передаются в блок задания1 К,1 ытекущего направления напряженности поля потерь 9, Сформированные в блоке задания текущего направления на пряженности поля потерь 9 задающие сигналы направления изменения текущего состояния параметров потерь Впоступают с выхода блока задания текущего направления напряженности поля потерь 9 в блок задания напря 38женности поля потерь 10. В блоке задания напряженности поля потерь 1 О формируется значение текущей напряженности пространства потерь косвенно управляемого объекта и передается с первого выхода непосредственно или покомпонентно в вице значений параметров 6 и Х В " В на первый входк дк 1блока оценки ожидаемого приращения потерь 11. Связь второго выхода блока задания напряженности поля Потерь...
Система идентификации колебаний присоединенного к объекту упругого элемента с дискретно изменяемой жесткостью

Номер патента: 1543384
Опубликовано: 15.02.1990
Авторы: Корзников, Мануйлов, Смирнов
МПК: G05B 13/00
Метки: дискретно, жесткостью, идентификации, изменяемой, колебаний, объекту, присоединенного, упругого, элемента
...можно реализовать в виде четырех усилителей и сумматора.Третий вход объекта наблюдения соединен через элемент 4 ф задержки с блоком 1, запускающим систему в работу, а четвертый вход - с источником 10 задающего воздействия, На первый, второй и третий входы объекта наблюдения подводится информация соответственно об угле и угловой скорости жесткого тела и величине управляющего параметра Ю.Для демпфирования колебаний упругого элемента может быть применено управление его жесткостным параметром, для чего гредназначен источник 10 задающего воздействия, который выдает сигнал, пропорциональный требуемому приращению жесткости Д, на четвертый вход объекта 2 наблюдения.Значение требуемого приращения жесткости поступает также на вход сумматора 5,...
Способ автоматической оптимизации инерционных управляемых объектов

Номер патента: 492853
Опубликовано: 25.11.1975
Автор: Гурович
МПК: G05B 13/02
Метки: автоматической, инерционных, объектов, оптимизации, управляемых
...Ыв точке Е при х = х, где х - выЗВ ЗВчисленное значение входного воздействия,соответствующее экстремальному значени.выходного воздействия объекта у проЗИ / 20водится отключение исполнительного механизма входного воздействия.На графике (см. фиг. 3) двух моделир -,ющих входное воздействие объекта сигнал в ,М /х/ и М /х/ точки х, х и х соотв т-Ю1 2 3ствуют точкам реверса х, х . и х соотл й С., Д,ветственно, точка х соответствует точ-;,ке х . Значение сигнал М /х / ввиду1 ЗВлинейной зависимости от входного воздейс -вия х соответствует среднему /средневзвещенному/ значению х относительно его зн -чений, соответствующих точкам реверса.Способ реализуется следующим образомЗЬПолагаем, что движение по ЗСХ привключении исполнительного механизма...
Управляющий клапан для пневматической тормозной системы прицепного транспортного средства

Номер патента: 943048
Опубликовано: 15.07.1982
Авторы: Борисов, Высоцкий, Демидович, Ковалевский, Кокин, Мартыненко, Мороз
МПК: B60T 15/18
Метки: клапан, пневматической, прицепного, системы, средства, тормозной, транспортного, управляющий
...7 с помощью трубопровода 6. Клапан имеет крышку 44, которая герметизируется, например, уплотнительным кольцом 45 и образует полость управления 46, подключенную к трубопроводу 3.Для использования клапана 5 в двухпроводной схеме привода по фиг. 3 дополнительный корпусной элемент 47 сопряжен и уплотнен относительно корпуса 13 уплотнительным кольцом 48. Следящее устройство выполнено в виде двух жестко связанных поршней 49 и 19,Жесткость соединения достигается с помощью стопорного кольца 50 (или гайки) для штока 51 поршня 19. Указанный шток проходит через центральное отверстие в перегородке 52 элемента 47 и уплотнен в ней уплотнительным кольцом 53. Соединение поршня 49 со штоком 51 герметизируется кольцом 54. В элементе 47 расположен...
Устройство для ввода в систему автоматического регулирования сигнала, пропорционального производной рассогласования по времени

Номер патента: 130542
Опубликовано: 01.01.1960
МПК: G05B 6/02, G08C 13/00
Метки: ввода, времени, производной, пропорционального, рассогласования, сигнала, систему
...1. Устройство для ввода в систему автоматического регулирования сигнала, пропорционального производной рассогласования по времени, отличающееся тем, что, с целью использования устройства одновременно в качестве дифференциатора, усилителя и модулятора, оно выполнено в виде дифференциального магнитного усилителя с выходом на переменном токе, состоящего из двух однотактных дагнитных усилителей дроссельного типа без положительной обратной связи и смещения с одинаковыми статическими характеристиками, но с различными постоянными времени.2. В устройстве по п.применение короткозамкнутой обмотки в одном из однотактных усилителей. актор В. М. Парнес Текред А. А. Кудрявицкая Корректор Б. А. Шнейдерман Объем О,7 и .1-6 г.3 ко й ум. 70 Х...
Предыдущий патент: 208073
Следующий патент: 208075
Случайный патент: Устройство для отбора проб газа