Способ автоматической оптимизации инерционных управляемых объектов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 492853
Автор: Гурович


Текст
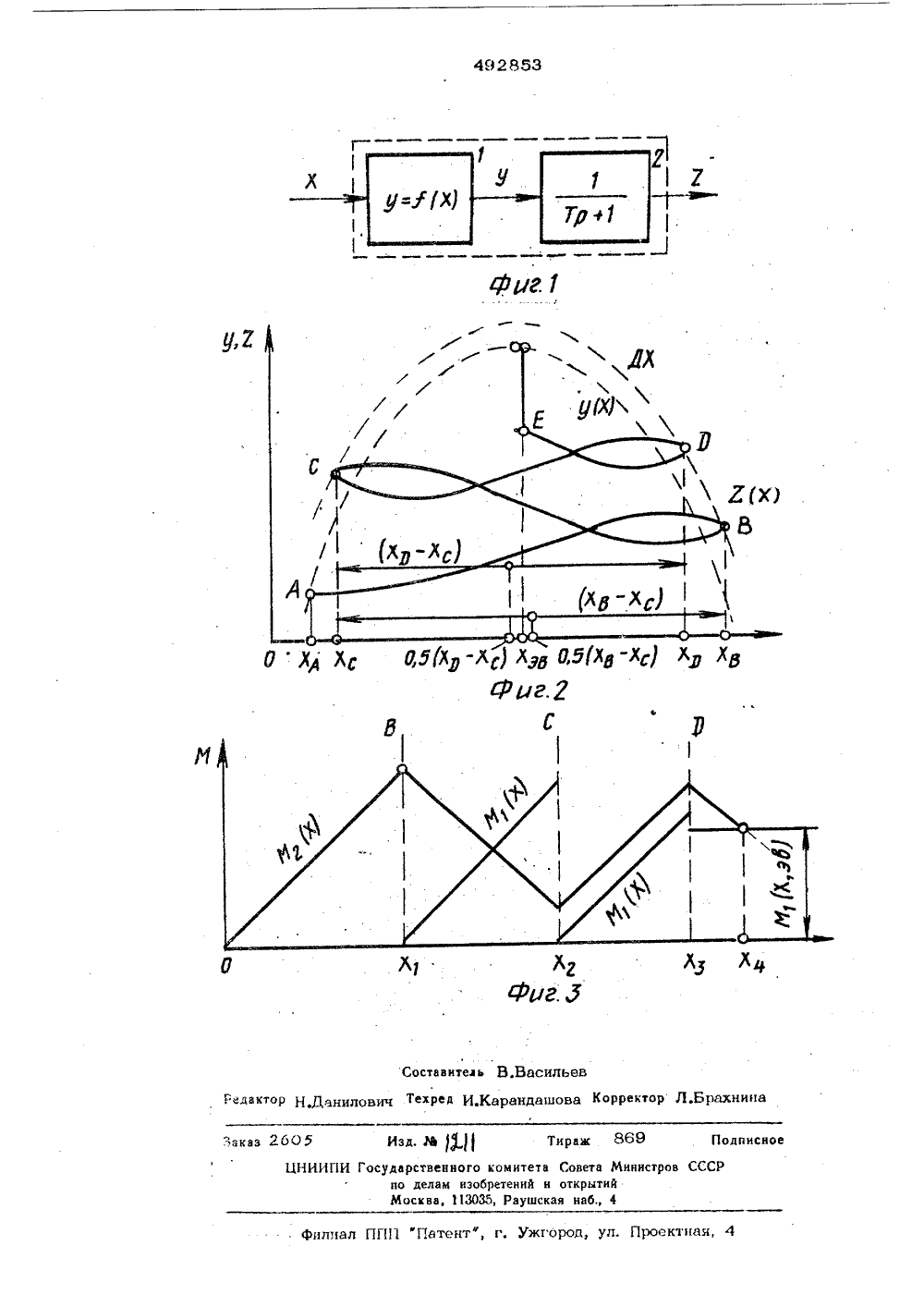
ОП ИСАНИЕИЗОБРЕТЕН ИЯ К АВТОРСКОМУ СВИДИЕДЬСТВУ Союэ СоветскихСоциалистическихреспублик)М. Кл, 6 05 в 3 3/02 осударстеенный ноинтетСаветв Мнннотров СССРпо делам нэобретеннйн открытий Приорнте) Дата опубликования описания 25 03 7. Гурович 2) Авторизобретенн шкентский ордена Трудового Красного Знаменититут инженеров желеэнодорожнсе о транспорт) СПОСОБ АВТОМАТИЧЕСКОЙ ОПТИМИЗАЦИИ ИНЕРЦИОННЫХ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И в Изобретение относится к автоматичес-. ким системам оптимизации и может быть использовано при разработке различных систем оптимизации инерционных одно-, и ,многоканальных управляемых объектов, , обладающих экстремальной статической ., характеристикой ЭСХ. Предполагается, :что статическая характеристика объекта аппроксимирована четной функцией и в течение определенного времени, необходи.мого для реализации всех операций спосо;ба, может считаться стабильной.Известен способ автоматической оптимизации инерционных управляемых объектов, основанный на моделировании входного воздействия объекта линейно изменяющимся сигналом, запоминании этого сигнапа, определении половины его значения,измеренного между реверсами входного .воздействия, и фиксации входного воздействия.Цель изобретения - повысить точностьи обеспечить оптимизацию путем уменьше.ния числа колебательных движений при по-.иске экстремума в объектах, экстремальнаястатическая характеристика которых ап. проксимирована четной функцией.Это достигается тем, что входное воз действие моделируют дополнительным сигналом, изменяющимся линейно и синхронно с входным воздействием, измеряют изапоминают линейно изменяющийся сигналсоответственно между первым и вторым,втсрым и третьим реверсами входного воз О действия, суммируют половины значенийлинейно изменяющегося сигнала, измеренные в укаэанныепромежутки времени, ипри равенстве дополнительного сигналаполученной полусумме сигналов фиксируютходное воздействие.На фиг, 1 дана структурная схема управляемого объекта; на фиг. 2 - графикхарактеристики объекта в зависимостиот входного воздействия; на фиг. 3 - гра;фик работы моделирующих сигнчлов.Управляемый объект (см. фиг, .1) состо.ит из безынерционной нелинейности 1, ап- .проксимированной четной функцией и апериодического звена 2; входное воэдейст- И вие объекта обозначено х, выходное воз3действие нелинейной части - у, выходноевоздействие управляемогообъекта - У,Характеристики объекта (см. фиг, 2)содержат экстремальную статическую характеристику (ЭСХ) объекта у/х/, криву 1,/х/, представляющую собой иэмененивыходного воздействия инерционного объе -та, а также динамическую характеристик 1/ДХ/, являющуюся геометрическим места лточек реверсов /точки В, С, Д/ выходного воздействия объекте,при поиске экстрмума; точка А - начальная точкд х, хА Вх и х -. значения входного воздействияДсоответствующие вышеназванным точкам; Ыв точке Е при х = х, где х - выЗВ ЗВчисленное значение входного воздействия,соответствующее экстремальному значени.выходного воздействия объекта у проЗИ / 20водится отключение исполнительного механизма входного воздействия.На графике (см. фиг. 3) двух моделир -,ющих входное воздействие объекта сигнал в ,М /х/ и М /х/ точки х, х и х соотв т-Ю1 2 3ствуют точкам реверса х, х . и х соотл й С., Д,ветственно, точка х соответствует точ-;,ке х . Значение сигнал М /х / ввиду1 ЗВлинейной зависимости от входного воздейс -вия х соответствует среднему /средневзвещенному/ значению х относительно его зн -чений, соответствующих точкам реверса.Способ реализуется следующим образомЗЬПолагаем, что движение по ЗСХ привключении исполнительного механизма вход -ного воздействия началось иэ точки А/см.фиг. 2 /вправо в сторону экстремума.При движении вправо сигнал М /х/ уве2 40личивается, пр" движении влево- уменьшаеся,На правой ветви ЭСХ в точке В йос.е"дует первый реверс исполнительного меха низма входного воздействия, синхронно с фкоторым после реверса будет уменьшатьсясигнал М /х/. Начиная с момента первог(2реверса подают сигнал М /х/ который уве196личивается до момента второго реверса, 0т.е. до точки С по ЭСХ. И момент второго реверса производят запоминание половины значения сигнала М /х /, иэмереннаг,4 а1 24.за период между первым и вторым реверсами. Одновременно с запоминанием 0,5 М1/х / в момент второго реверса вновь .подакг сигнал М /х/, который изменяется1соответственно входному воздействию до -ф момента третьего реверса т,е, до точки Д по ЗСХ. И момент третьего реверса производят запоминание половины значения сигнала М,/х / измеренного чапериод между вторым и третьим реверсами. После третьего реверса производят вычисление М /х / путем определения1 ЭИсреднего арифметического значения двух запомненных сигналов 0,5 М /х / и1 2, 0,5 М /х /, Найденное значение М (х )1 ЭИ запоминают.Текущее значение х, равное х , опреЭВ деляют, сравнивая сигналы М (х) и2 М (х ). Рвенство укаэанных сигналов соответствует достижению текущим значением. х вычисленного значения х, т.е.ЭВ достижению экстремума. В точке Е /см. фиг. 2/,проводится принудительное отключение исполнительного механизма, т.е. фиксация найденного значения входного воздействия. Из точки Е благодаря само- выравнивающим свойствам управляемого объекта изображаюшая состояние системы точка перемещается в экстремум ЭСХ причем скорость этого перемещения макси;, мальва.Из-эа воэможности дрейфа ЭСХ вся последовательность операций эпизодически повторяьтся.Формула изобретенияСпособ автоматической оптимизации инерционных управляемых объектов, основанный на моделировании входного воздействия объекта линейно изменяющимся сигналом, запоминании этого сигнала, оп -, ределении половины его значения, измеренного между реверсами входного воздействия, и фиксации входного воздействия, о т л и ч а ю щ и й с я тем, что, с целью повышения точности и быстродействия путем уменьшения числа колебательных движений при поиске экстремума в объектах, экстремальная статическая характеристика которых аппроксимирована четной функ- цией, входное воздействие моделируют дополнительным сигналом, изменяющимся линейно и синхронно с входным воздействием, измеряют и запоминают линейно изменяющийся сигнал соответственно меж-ду первым и вторым, вторым и третьимреверсами входного воздействия, суммируютчоловины значений линейно изменяющегося сигнала, измеренные в указанные промежутки времени, и при равенстве дополнительного сигнала полученной полусумме сигналов фиксируют входное воздействие.
СмотретьЗаявка
1979685, 10.12.1973
ТАШКЕНТСКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ИНСТИТУТ ИНЖЕНЕРОВ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА
ГУРОВИЧ ГРИГОРИЙ МЕНДЕЛЕЕВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: автоматической, инерционных, объектов, оптимизации, управляемых
Опубликовано: 25.11.1975
Код ссылки
<a href="https://patents.su/3-492853-sposob-avtomaticheskojj-optimizacii-inercionnykh-upravlyaemykh-obektov.html" target="_blank" rel="follow" title="База патентов СССР">Способ автоматической оптимизации инерционных управляемых объектов</a>
Способ имитации воздействия натурного объекта

Номер патента: 1820313
Опубликовано: 07.06.1993
Автор: Шкатов
МПК: G01N 27/90
Метки: воздействия, имитации, натурного, объекта
...имитации воздействия натурного объекта осуществляется следующим об разом.На первом этапе проводится запись калибровочной магнитограммы, для чего используется схема записи, где в качестве объекта 9 используется образец 6 с дефек- "0 том.На втором этапе сканируют поверхность характерных натурных обьектов 9; предназначенных для дефектоскопии; первичным преобразователем 3 и записывают 15 магнитограмму выходного напряжения первичного преобразователя 3 по второму каналу и напряжение, пропорциональное току возбуждения, создаваемому генератором 7, в токовой цепи первичного преобразовате-. 20 ля 3 по первому каналу магнитофона 1.На третьем этапе выполняют масштабирование, для чего сканируют поверхность образца 6 при включении по схеме...
Дистанционный измерительный орган

Номер патента: 1259389
Опубликовано: 23.09.1986
Авторы: Бахманн, Ванин, Гиновкер, Печковский
МПК: H02H 3/40
Метки: дистанционный, измерительный, орган
...вокончательном виде запишутся как 20К =-1 с 1 Е 1 йй+ К1. = -ай - "Йй + Ь(5)м,1 моПолученные уравнения определяютструктуру контуров самонастройки параметров. Коэффициенты Е определяются коэффициентами передачи отдельныхэлементов контуров самонастройки ( перемножителей 5 и 6 интеграторов 7и 8 и сумматоров 4),Рассмотрим работу устройства, используя для удобства в качестве обозначений напряжений, действующих всхеме, обозначения реальных физических величин И,. К и Ь).В статике параметры модели К и Ь 35настроены до равенства.их предаварийным параметрам электропередачи. Приэтом выходной сигнал Ц настроенноймодели совпадает с напряжением линииТогда значение выходного сигнала 40сумматора 4 в соответствии с уравнением (3) равно нулю. Нулевой...
Способ измерения напряжения в заданной точке периодического сигнала

Номер патента: 1323966
Опубликовано: 15.07.1987
Автор: Лапин
МПК: G01R 13/28, G01R 19/00
Метки: заданной, периодического, сигнала, точке
...которое осуществляет развертку изображения исследуемого сигнала на экране осциллографа 2.Во время прямого хода развертки по сигналу блока 3 развертки задатчик 6 момента измерения формирует строб-импульс с длительностью в 10 - 1000 раз меньшей длительности прямого хода развертки и с вре 5 10 15 20 25 30 35 40 45 50 менным положением, соответствующим положению регулятора задатчика 6 момента измерения, Строб-импульс управляет коммутатором 5. На время действия строб-импульса коммутатор 5 отключает от входа канала вертикального отклонения осциллографа 2 шину 4 исследуемого сигнала и подключает к нему выход регулируемого источника 1 опорного напряжения.В соответствии с временным положением строб-импульса на изображении сигнала...
Устройство для управления экстремальным объектом с неустойчивой линейной частью

Номер патента: 901995
Опубликовано: 30.01.1982
Автор: Черкашин
МПК: G05B 13/00
Метки: линейной, неустойчивой, объектом, частью, экстремальным
...входное воздействие на нелинейную часть объекта; у(1) - контролируемый скалярный выход объекта управления; А,В,С и Р - матрицы коэффициентов размерами ии, и 1, 1 и и 1 и,Возможность построения идентификатора состояния линейной части объекта предполагает выполенние условия идентифицируемости линейной части по контролируемому выходу, Переменные состояния идентифицируются на основании информации о входном воздействии на объект и(Ц и выходном сигнале у(Й), а сам идентификатор строится на основании модели линейной части объекта. Уравнения движения идентификатора 5 состбяния имеют вид Х(О=А)(Ю+ЬОЩ+),1 МИИЗ), УИ,) =С 1 Щл где х(1) - оценка вектора состояния линейной части объекта, компонентами которого являются выходные сигналы...
Устройство для контроля разности между максимальным и минимальным значениями линейного размера детали

Номер патента: 426131
Опубликовано: 30.04.1974
Метки: детали, значениями, линейного, максимальным, между, минимальным, размера, разности
...10 и установленных на его входах двух накопительных аналого-цифровых преобразователей 11 и 12, соединенных с выходом преобразователя 1. Один из этих аналого-цифровых преобразователей служит для преобразования отрицательного сигнала в цифровой код, а другоп - для преобразования положительного сигнала в цифровой код. Шаг временного квантования в аналого-цифровых преобразователях 11 и 12 больше или равен длительности перемещения детали на заданное линейное или угловое расстояние. Заданным расстоянием при угловом перемещении (вращении) детали может быть, например, один оборот детали. 1-1 акопительные аналого-цифровые преобразователи напряжения или тока, как известно, содержат генератор импульсов, счетчик импульсов, цифро-аналоговый...
Предыдущий патент: Автоматизированная система управления производственными процессами
Следующий патент: Устройство для программного временного управления
Случайный патент: Устройство для лучевой терапии