Бинарная система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
, (21) 4487893/24-24 (22) 18.08.88 (46) 23.07.90, Бюл. М 27 (72) Г.И. Авруцкий, С.В. Емель В,П. Иванов, С.К, Коровин и И.Г. Мам (53) 62 - 50(088.8) (56) Авторское свидетельство СССР М 1126927, кл. 6 05 В 13/02, 1984. (54) БИНАРНАЯ СИСТЕМА УПРАВЛЕ (57) Изобретение относится к автом скому управлению и регулированию с венно нестационарными объект предназначено для управления с за ми показателями качества свободны жением объекта, параметры кото яно едов НИЯ атиче- ущестами и данным двирого и 2 ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР скорость их изменения произвольно меняются в известных ограниченных диапазонах. Для уменьшения зависимости коэффициента усиления в замкнутом контуре управления от изменения параметров объекта и улучшения динамики переходных процессов в систему дополнительно введен задатчик динамических свойств контура, выполненный в виде дифференциатора 14 и усилителя 15, входы которых соединены с выходом сумматора 8, а выходы подключены к сумматору 13, Этим повышается качество процессов управления путем устранения их колебательности. что является целью изобретения. 1 ил.35 40 изменения параметров объекта. Для устранения этой зависимости в контуре КОС формируется производная от сигнала ошибкиИзобретение относится к автоматическому управлению и регулированию существенно нестационарными объектами,Целью изобретения является повышение качества процессов управления путем устранения их колебательности.На чертеже представлена структурная схема бинарной системы управления,В бинарную систему управления входят первый сумматор 1, умножитель 2, объект 3 управления, блок 4 сравнения, задатчик 5, дифференциаторы 616 игруппы, усилители 717 П первой группы, второй сумматор 8, элементы 919 п определения модуля, усилители 10 ъ.10 п второй группы, релейный элемент 11, интегратор 12 с ограничением, а также третий сумматор .13, дополнительные дифференциатор 14 и усилитель 15,Система работает следующим образом.Выходной сигнал у(т) объекта 3 управления сравнивается с сигналом у(т) задатчика 5 в блоке 4 сравнения, Полученный сигнал х 1(т) поступает на вход элемента 91 определения модуля, а на вход остальныхэлементов 92" 9 п определения модуля через соответствующие дифференциаторы 61 6 п- сигнал с целью получения необходимой для управления информации о состоянии объекта управления. Сигналы свыходов элементов определения модуля через соответствующие усилители 10110 подаются на вход сумматора 1, с выхода которого сигнал подается на первый вход умножителя 2,выходной сигнал которого поступает на вход объекта 3 управления.Рассмотренный контур координатно- обратной связи (КОС) обеспечивает решение поставленной задачи управления для объекта, имеющего постоянные параметры. С целью обеспечения требуемого качества управления для объекта с переменными параметрами вводится дополнительный контур координатно-операторной обратной связи (КООС), автоматически изменяющий параметры контура КОС в зависимости от текущего состояния объекта.При этом коэффициент передачи замкнутой системы объект - регулятор изменяется в зависимости от регулирования контура.Контур КООС функционирует следующим образом. 5 10 15 20 25 30 Сигнал ошибки регулирования хф) с выхода блока 4 сравнения и сигналы с выходов дифференциаторов 616 Пчерез соответствующие усилители 77 П подаются на входы второго сумматора 8, Полученная на выходе линейная комбинация ошибки х 1 (1) и ее (и) производных является ошибкой регулирования а(т) контура КООС. На выходе третьего сумматора 13 образуется линейная комбинация 6 (1) производной от о(т), полученной на выходе дополнительного дифференциатора 14, и самой ошибки регулирования, пропущенной через усилитель 15. Значение сигнала 6(т) используется для изменения параметров контура КОС сигналом,и (т) таким образом, чтобы стабилизировать скорость изменения регулируемых координат объекта,Стабилизация скорости изменения координат позволяет устранить колебательность процессов в системе управления,Включение в контур КООС интегратора 12 обеспечивает непрерывность управляющих воздействий о(т) на объект управления,Формула изобретенияБинарная система управления, содержащая последовательно соединенные первый сумматор, умножитель, объект управления и блок сравнения, второй вход которого соединен с выходом задатчика, а выход - с входами дифференциаторов группы, выходы которых и выход блока сравнения соединены через соответствующие усилители первой группы с входами второго сумматора, а через соответствующие элементы определения модуля -свходами соответствующих усилителей второй группы, выходы которых подключены к соответствующим входам первого сумматора, релейный элемент, последовательно соединенный с интегратором с ограничением, выход которого соединен с вторым входом умножителя, о т л и ч а ющ а я с я тем, что, с целью повышения качества процессов управления путем устранения колебательности, в нее введены третий сумматор, дополнительные дифференциатор и усилитель, входы которых соединены с выходом второго сумматора, а выходы - с соответствующими входами третьего сумматора, выход которого подключен к входу релейного элемента,
СмотретьЗаявка
4487893, 18.08.1988
ПРЕДПРИЯТИЕ ПЯ М-5904, ВСЕСОЮЗНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ СИСТЕМНЫХ ИССЛЕДОВАНИЙ АН СССР
АВРУЦКИЙ ГАРРИ ИЗРАИЛЕВИЧ, ЕМЕЛЬЯНОВ СТАНИСЛАВ ВАСИЛЬЕВИЧ, ИВАНОВ ВЛАДИМИР ПЕТРОВИЧ, КОРОВИН СЕРГЕЙ КОНСТАНТИНОВИЧ, МАМЕДОВ ИГОРЬ ГУЛИЕВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: бинарная
Опубликовано: 23.07.1990
Код ссылки
<a href="https://patents.su/2-1580319-binarnaya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Бинарная система управления</a>
Устройство передачи выходного сигнала датчика к дифференциальному усилителю

Номер патента: 1689906
Опубликовано: 07.11.1991
Авторы: Бочаров, Котельников, Царевский
МПК: G01V 3/04
Метки: выходного, датчика, дифференциальному, передачи, сигнала, усилителю
...содержит два резистора 9 и 10 с входными клеммами11 и 12 для подключения через линии 13 и 14связи датчика 15 сигнала с общей точкой 16и источником 17 синфазного напряжения,Дифференциальный усилитель 18 подключается своими двумя входами к первымдвум выходным сигнальным клеммам 3 и 4,а общей точкой - к третьей выходной клемме 8 "Земля",Для правильной работы устройства сопротивления резисторов 9 и 10 и емкостиконденсаторов 1 и 2 должны быть одинаковыми, величина емкости конденсатора 6 исопротивления резистора 7 соответственно ви раз меньше и в п раз больше емкости конденсатора 1 и сопротивления резистора 9 (гдеи - целое или дробное число, значительнобольше единицы), а сумма сопротивленийдатчика 15, линии 13 связи и резистора 9должна быть...
Способ измерения среднего значения периодического сигнала, переменная составляющая которого модулирована по амплитуде

Номер патента: 1575124
Опубликовано: 30.06.1990
Авторы: Котовщиков, Левин, Пеховский, Севрюков
МПК: G01R 19/02
Метки: амплитуде, значения, которого, модулирована, переменная, периодического, сигнала, составляющая, среднего
...интегрирования и определение среднего значения периоди- а ческого сигнала как полусуммы каждыхе двух соседних по времени результатов интегрирования обеспечивают уменьшение погрешности, обусловленной моду- С ляцией амплитуды переменной составляющей периодического сигнала. 1 ил.1575124 среднее значение входного сигнала какполусумму запомненных в блоках 8результатов интегрирования. Формула и з о б р е т е и и я Составитель С, РыбТехред М,Ходанич рректор Э,Лончаков едактор Л. Веселовска 4 Заказ 1782 Тираж 561 ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ ССС113035, Москва, Ж, Раушская наб., д, 4/5 Производственно-издательский комбинат "Патент", г.Ужгород, ул. Гагарина,101 7 каналов 1 и 1...
Преобразователь напряжения в частоту

Номер патента: 1019626
Опубликовано: 23.05.1983
Авторы: Кислых, Корищ, Косачева
МПК: H03K 13/20
Метки: частоту
...через резистор с шиной преобразуемого напряжения, источник опорного напряжения, два ключа, компаратор и делитель напряжения 1).Недостатком этого преобразователя является сложность.Известен преобразователь напряжения в частоту, содержащий интегратрр, выполненный на операционном усилителе, неинвертирующий вход которого соединен с источником опорного напряжения, а инвертирующий через конденсатор, шунтированный ключом сброса, - с выходом и через резистор с входной шиной, и нуль-орган, вход которого подключен к выходу интегратора 2 ).1 На чертеже представлена Функциональная электрическая схема преобразователя.Устройство содержит операционный усилитель 1, инвертирующий вход которого соединен через конденсатор .2 свыходом и через рези....
Ограничитель уровня сигнала на входе операционного усилителя

Номер патента: 608177
Опубликовано: 25.05.1978
МПК: G06G 7/25
Метки: входе, ограничитель, операционного, сигнала, уровня, усилителя
...До такого же уровня будет ограничиваться нагряжение на выходе 30 операционного усилителя 11 при его электронном переключении, которое происходит при поступлении сигнала управления электронным переключением на вход 26 блока 7 отрицательного токового смещения. При этом, открыв транзистор 27, сигнал с его коллектора через диод 29 компенсирует токовое смещение резистора 20 блока 7 отрицательного токового смещения и запирает диод 22 развязки.Сигнал с коллектора транзистора 27 поступает также на вход 31 блока 8 положительного токового смещения. отпирая транзистор 28, сигнал с коллектора которого компенсирует токовое смещение резистора 21 блока 8 положительного токового смещения и запирает диод 23 развязки.Выбором требуемой величины...
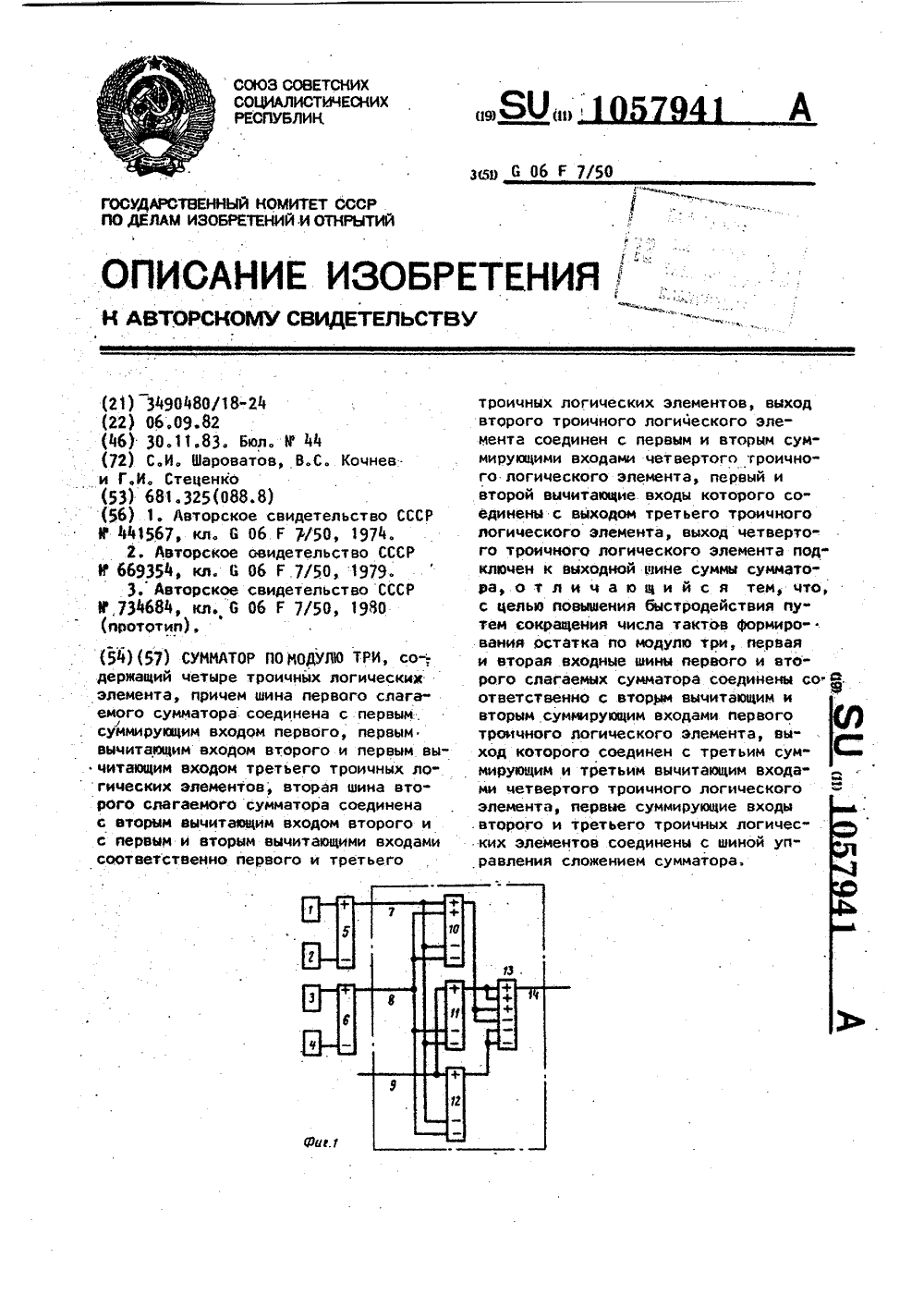
Сумматор по модулю три
Номер патента: 1057941
Опубликовано: 30.11.1983
Авторы: Кочнев, Стеценко, Шароватов
МПК: G06F 7/50
...Сигнал навыходеэлемента 00+1 0 0 0 + 0 01 0 О0 0 + 0 0 +1 0 0 +1 0 ф + 0 О О + + О +О + М " 1 1 +1 В табл. 1 представлена работа троичного логического элемента. 30+1 Таблица О ф 0 0 + 0 Сигнал элемента на входе Сигнал на выходеэлемента Суммирующий+ о о 0 О О 0 О О 0 0 О 0 0 0 0 0 0 0 0 0 О 0 0О + 0,0 +1 0 О Сигнал элемента на входе пеевте и еее Суммирующим ВычитающииГТ 0 О + Ы О ОФ 1057941Продолжение табл. 1 Продолжение табл. 1 Сигнал навыходеэлемента Сигнал навыходеэлемента Сумм 1О О О ф О ф О+ +1 О +ч++ 41 +1 ф + + От т е е ее т еа ееет ттт ттт т,т 15 Сумматор по модулю три работаетпотактно (Фиг, 2), система тактовыхимпульсов - трехФазная (сигналы 517, при этом каждый разряд очередногцетырехразрядного числа поступает с 20...
Предыдущий патент: Устройство для гашения колебаний упругой конструкции
Следующий патент: Устройство для контроля систем программного управления станком
Случайный патент: Устройство для уплотнения зернистых смесей