Система управления грузоподъемным средством
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
,ЯО 504 В 66 ОПИСАНИЕ ИЗОБРЕТ 1 ЖЯуп щбро тво СССРО, 19,03.80. 54) СИСТЕМА УПРАВЛЕНЫМ СРЕДСТВОМ РУЗОПОДЪЕМ 3ФГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИЙ Н А ВТОРСКОМУ СВИДЕТЕЛЬСТВУ(57) Изобретение относится к подъем но-транспортному машиностроению, а именно к системам управления грузоподъемными средствами. Цель изобретения - обеспечение безопасности работы. Система содержит узел управ ления приводом подъема 1, один входГ которого соединен с питающеи магист 3ралью, а другой - с выходом переключателя 2 и входом дополнительногодвухпозиционного.пневмораспределителя 3, а выход - с рабочей полостьюсилового цилиндра 5 привода подъемаи входом клапана 6 последовательности. Выход последнего соединен с управляющим каналом дополнительногопневмораспределителя 3, выход которого через инерционный элемент 8подключен к каналу управления пневмораспределителя привода захвата 9,имеющего связь с силовым цилиндромпривода захвата 10. Случайные срабатывания переключателя 2 при перемещении оператором груза не могутпривести к разжиму губок захвата.1 ил, 13537Изобретение относится к подъемно- транспортному машиностроению, а именно к системам управления грузоподъемными средствами, и является усовер,) шенствованием системы упра.вления по авт. св. У 893824.Цель изобретения - обеспечение безопасности работы.На чертеже изображена система управления груэоподъемным средством.Система управления содержит узел управления приводом 1 подъема, один вход которого соединен с питающей магистралью, второй - с выходом переключателя 2 и входом дополнительного двухпозиционного пневмораспределителя 3 с пружиной 4, а выход связан с рабочей полостью силового цилиндра 5 привода подъема и входом клапана 6 последовательности с регулируемым винтом 7, причем выход клапана 6 последовательности соединен с управляющим каналом дополнительного пневмораспределителя 3, выход которого 25 через инерционный элемент 8 подключен к каналу управления пневмораспределителя привода 9 захвата, имеющего связь с силовым цилиндром привода 10 захвата, ЗОСистема управления грузоподъемным средством работает следующим образом.В исходном состоянии захватное устройство разжато, т.е. на выходе переключателя 2 есть устойчивый сигнал, который переключает пневмораспределитель привода 9 захвата на выдачу сигнала разжима захвата. Одновременно с этим выходной сигнал переключателя 2 поступает на вход узла управления приводом 1 подъема, преобразуется там в выходной сигнал, который и поддерживает в рабочей полости силового цилиндра 5 привода подьема давление, уравновешивающее грузоподъемное средство без груза, Оператор подводит захват к изделию и выключением переключателя 2 производит зажим, а затем подъем изделия. Узел управления приводом 1 подъема реагирует на вес груза, формируя сигнал управления силовым цилиндром 5 привода подъема, т,е, поддерживая в рабочей полости силового цилиндра привода подъема давление, уравновешивающее вес груза, на которое, при соответствующей настройке регулировочного винта 7, реагирует клапан 6 последовательности, вырабатывая сиг 18нал управления дополнительным пневмораспределителем 3, больший чем усилие пружины 4. Дополнительный пневмораспределитель 3 переключается, соединяя с атмосферой управляющий канал пневмораспределителя 9. Таким образом, случайные срабатывания переключателя 2 при перемещении оператором груза не могут привести к раэжиму губок захвата, так как переключатель 2 оказывается отсеченным от линии инерционный элемент 8 - пневмораспределитель привода захвата 9 силовой цилиндр привода захвата 10.Когда оператор поместит зажатое изделие на ложемент выгрузки, давление в рабочей полости силового цилиндра привода подъема, уравновешивающее вес груза, упадет., клапан 6 последовательности перестает вырабатывать управляющий сигнал на дополнительный пневмораспределитель 3, который под действием пружины 4 переключается подсоединяя переключатель 2 к управлению силовым цилиндром привода захвата, Оператор переводит переключатель 2 в положение, соответствующее разжиму изделия, захват разжимается, причем благодаря наличию инерционного элемента 8 вначале узел управления приводом 1 подъема формирует сигнал уравновешивания грузоподъемного средства беэ груза, а уже потом разжимаются захваты.Формула изобретенияСистема управления грузоподъемным средством по авт,св, У 893824,о т л и ч а ю щ а я с я тем, что,с целью обеспечения безопасностиработы, она снабжена дополнительнымдвухпозиционным пневмораспределителеми клапаном последовательности, причем вход дополнительного пневмораспределителя связан с магистралью,соединяющей переключатель и одиниз входов узла управления приводомподъема, а выход через инерционноезвено, соединен с пневмораспределителем привода захвата, канал управления подключен к выходу клапана последовательности, который своим входом подсоединен к магистрали, соединяющей узел управления приводомподъема и рабочую полость силовогоцилиндра привода подъема,
СмотретьЗаявка
3979357, 22.11.1985
ПРЕДПРИЯТИЕ ПЯ А-7690
БЕРЕЗИН ГРИГОРИЙ АБРАМОВИЧ, БОБРОВ ИЛЬЯ СТАНИСЛАВОВИЧ
МПК / Метки
МПК: B66C 13/20
Метки: грузоподъемным, средством
Опубликовано: 23.11.1987
Код ссылки
<a href="https://patents.su/2-1353718-sistema-upravleniya-gruzopodemnym-sredstvom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления грузоподъемным средством</a>
Привод захвата манипулятора

Номер патента: 547335
Опубликовано: 25.02.1977
Авторы: Андреенко, Ворошилов, Михальченко, Парц
МПК: B25J 3/00
Метки: захвата, манипулятора, привод
...вдоль оси 5. На концах стержней 3 и 4, обращенных : к оси 5, виполнены плоские рейки, взаимодейсты .1 нп 1 е через промежуточные зубчатыеколеса 8 и 9 с рейками 6 и 7, Для воспри-ф ятия распорных усилий, возникающих в зубчатых зацепл:.:ив х реек стержней 3 и 4 срейками 6 и 7 вт,лок, предусмотрены поддерживающие опорные ролики 10 и 11.Зубчатые колеса 8 и 9 и опорные ролики И10 и 11 жестко закреплены соответственно на корпусах локтевого и кистевого звеньев с помошьк кронштейнов 12 и 13. Для то го, чтобы рейки 6 и 7 при изгибе шарниране выходили из з цжцения с зубчатыми ко- Жлесами 8 и 9 их у 1 лвое положение относи-ельно оси 5 фиксируется упорами 14 и 15. Привод захвата манипулятора работаетследующим образом,При перемещении стержня 3 в...
Привод захвата манипулятора

Номер патента: 521128
Опубликовано: 15.07.1976
Автор: Клименченко
МПК: B25J 3/00
Метки: захвата, манипулятора, привод
...снабжены вилками. 16, входящими в репление с осью 8 шарнира. В щцилиндрах 13 выполнены продольные пазы,служащие для прохода жидкости, герметизация которой обеспечена сильфоном 17.Для разгрузки сильфона от скручивающегомомента в одном из пазов цилиндра уста- Иновлена шпонка 18. Стержень 3 подпружинен возвратной пружиной 1 9. В корпусезахвата установлена с возможностью осевого перемещения зубчатая рейка 20, снабжейная пружиной 21 и сцепленнаФс секто- ЗОрами 22, которые с помощью рычагов связаны с губками захвата. На валу 5 заирецлено зубчатое коническое колесо 23, которое через промежуточные колеса 24 и 25связано с колесами 26 и 27, сиДящими на 35валах 4 и 28.Привод захвата манипулятора работаетследующим образом,Движение от...
Привод захвата манипулятора

Номер патента: 874333
Опубликовано: 23.10.1981
Авторы: Клименченко, Кудрявцев, Никаноров, Парц
МПК: B25J 17/00
Метки: захвата, манипулятора, привод
...секторами 7, закрепленными на центральных колесах 8 и 9 конического дифференциала, смонтированного на поперечной оси 5.На поперечной оси 5 жестко закреплено водило 10 конического дифференциала, на котором установлены сателлиты 11 и 12.874333 15 Формула изобретения Составитель Т. Костикова Редактор С. Родикова Техред А. Бойкас Корректор М. Коста Заказ 9143/22 Тираж 1093 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж - 35, Раушская наб., д. 4/5 филиал ППП Патент, г. Ужгород, ул. Проектная, 4Сателлит 11 сцеплен с центральными колесами 8 и 9, а сателлит 12 - с коническими секторами 13 и 14, скрепленными с помощью трубчатых валов 15 и 16 соответственно со звеньями 1 и 2.Привод захвата...
Стенд для испытания привода механизма подъема грузоподъемной машины

Номер патента: 890111
Опубликовано: 15.12.1981
Автор: Мамаев
МПК: G01M 17/00
Метки: грузоподъемной, испытания, механизма, подъема, привода, стенд
...28, 29, а также блоккомпенсации, состоящий из реле 30времени с контактами 31-33, Выключагель 4 вь 1 полнен с контактами 34, 35 23(соответственно прямой и инверсныйвыход выключателя 4). Прямым и инверсным выходом блока времени циклаявляются соответственно контакты 9,10 реле 8, Выходом блока временизрподъема и паузы является контакт 19,выходом блока времени спуска и паузыявляется контакт 26, а выходом блокакомпенсации - контакт 33. В исходномсостоянии груз покоится на опоре 36. Стенд работает следующим образом.При подаче пигания реле 8 замыкает контакт 12. Реле 22 церез выдержку времени замыкает контакты 24, 26, при этом происходит опускание груза 1,40 Через заданное время замыкается контакт 25 реле 22, происходит включение реле...
Привод захвата
Номер патента: 1569224
Опубликовано: 07.06.1990
Авторы: Гамаюн, Голованов, Никитин
МПК: B25J 11/00
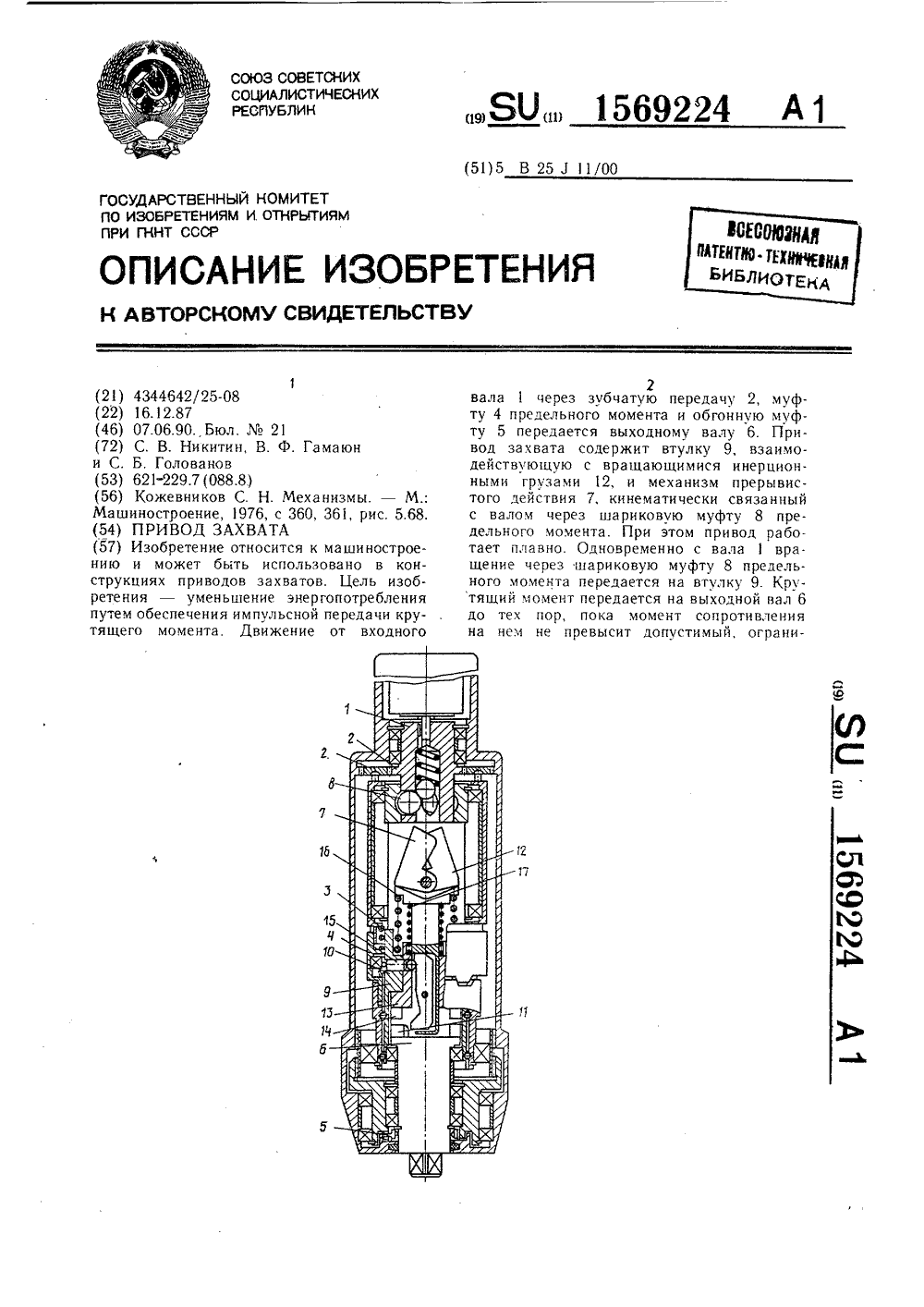
...крутящего мо- ника 14 и наковальник 11. Привод срабамента и обгонную муфту 5 с выходным тывает импульсно.валом 6. Привод снабжен механизмом 7 После этого пружина 16 возвращаетпрерывистого действия, кинематически свя- вал3 в первоначальное положение, что поззанным с входным валомчерез допол- воляет вернуться в первоначальное положенительную муфту 8 предельного крутящего 2 Б ние последовательно стопору 15 и муфте 4момента. Механизм 7 прерывистого действия предельного момента. Далее при необхопериодически взаимодействует с втулкой 9, димости цикл повторяется,установленной в корпусе 10. Механизм 7 со- Таким образом, механизм 7 прерывисдержит наковальню 11, установленную на того действия повышает эффективность равыходном валу 6. Втулка 9...
Предыдущий патент: Устройство для подвода энергии к подвижному объекту
Следующий патент: Выносная опора для подъемно-транспортной машины
Случайный патент: Устройство автоматического регулирования соотношения первичного и вторичного воздуха парогенератора