Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1138787
Автор: Орещенко
Текст
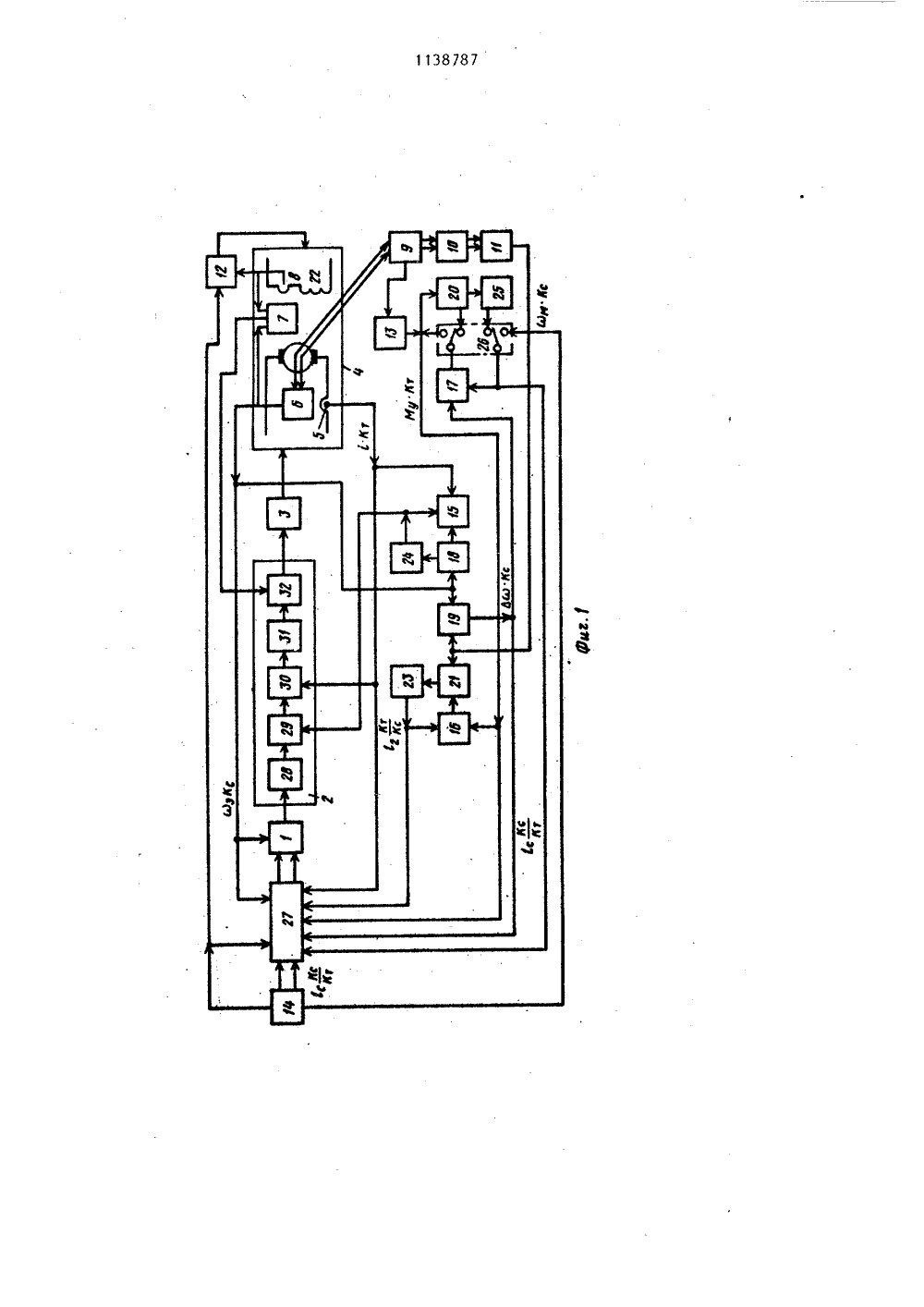
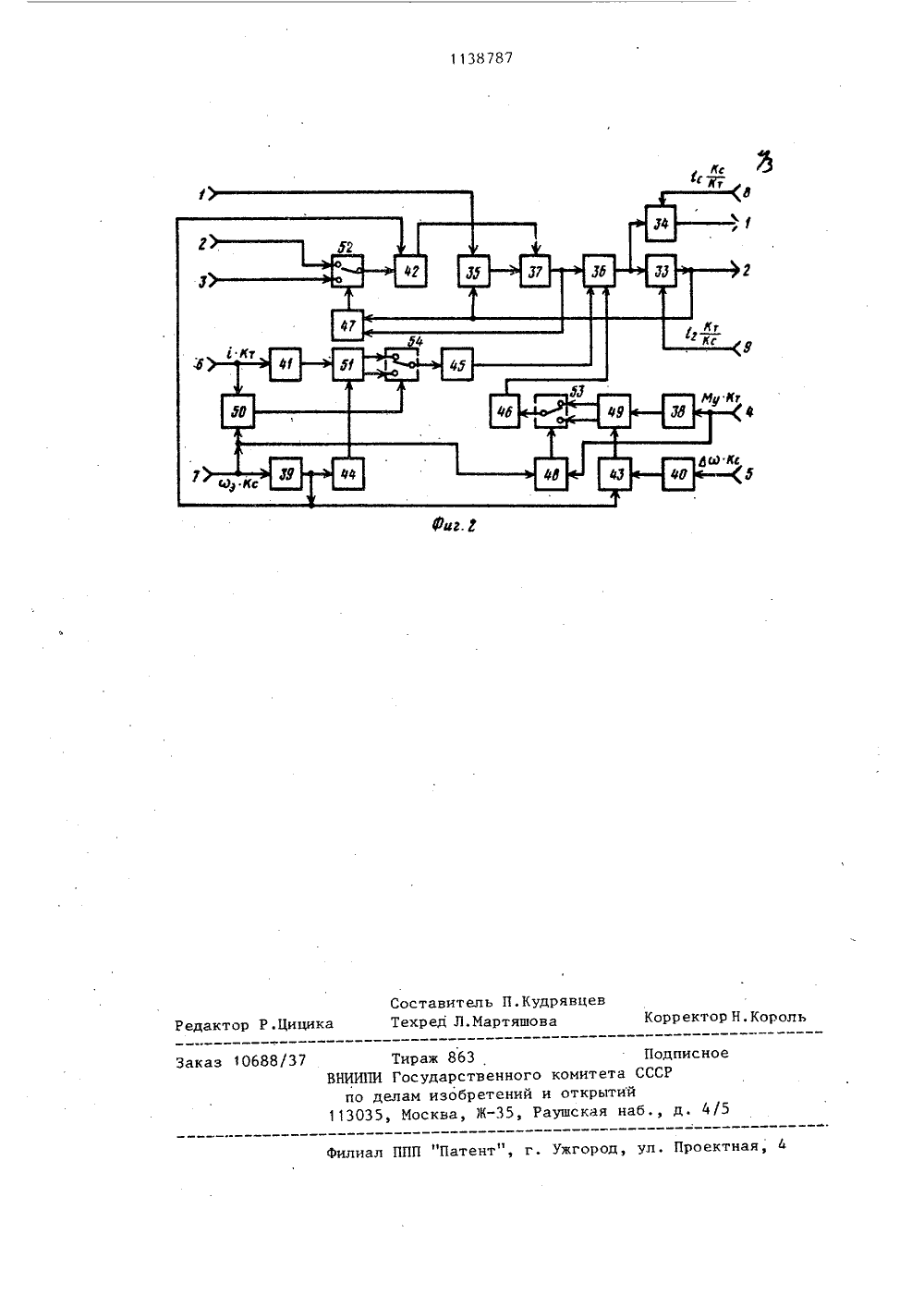
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСНИХРЕСПУБЛИН 19) (11) 51) С 05 В 13 0 КС%11,.";.ИT 11.фЛЛТ, б-ющщ,)р;,;и ОПИСАНИЕ ИЗОБРЕТ ЬСТ го р рого ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИЙ Н АВТОРСКОМ,Ф СВ(71) Новокузнецкое отделение Ордена Трудового Красного Знамени всесоюзного научно-исследовательского проектного института "Тяжпромэлектро - проект" им, Ф.Б. Якубовского (53) 62-50(088.8)(56) 1. Авторское свидетельство СССР В 962852, кл. С 05 В 13/04, 1981.2. Авторское свидетельство СССР Р 941923, кл . С 05 В 11/01, 1980 (прототип).(54) (57) 1. САМОНАСТРАИВАЮЩАЯСЯ СИСТЕУПРАВЛЕНИЯ, содержащая последова -тельно соединенные первый сумматор,первый регулятор, усилитель мощности, электродвигатель с установленными на нем датчиком тока,.датчиком скорости, датчиком ЭДС идатчиком тока возбуждения, упругуюмеханическую передачу, соединеннуюс технологическим механизмом, выходом подключенным к датчику скорости механизма, блок возбуждения, датчиупругого момента, соединенный с упругой механической передачей, задатчитри интегратора, второй, третий,.четвертый и пятый сумматоры, выход датчика тока возбуждения соединен с первым входом блока возбуждения, выход которого соединен свходом обмотки возбуждения электродвигателя, выход датчика скоростикоторого соединен с первыми входамИпервого,.второго и третьего сумматоров, выход первого интеграторасоединен с вторым входом второго сумматора, о т л и ч а.ю щ а я с я тем, что, с целью повышения качест-. ва и точности регулирования, в нее введены три корректирующих усилителя, коммутатор и второй регулятор, первый вход которого соединен с вторым входом блока возбуждения и первым выходом задатчика, второй и третий выходы которого соединены соответственно с вторым и третьим входами второго регулятора, четвертый вход которого соединен с первым входом второго интегратора, выходом датчика упругого момента, первым входом четвертого сумматора и первым выходом коммутатора, первый вход которого соединен с выходом третьего интегратора, первый вход которого соединен с выходом третьего сумматора и пятым входом второго регулятора, шестой вход которого соединен с вторым входом первого регулятора, первым входом первого интегратора и выходом датчика тока электродвигателя, датчик скорости которого соединен с седьмым входом второго регулятора, восьмой вход которого соединен с вторым входом третьего интегратора и вторым выходом коммутатора, второй вход которого соединен с четвертым выходом задатчика, выход первого корректирующего усилителя соединен с вторым входом второго интегратора и девятым входом второго регулятора, первый и второй выходы которого соединены соответственно с вторым и третьим входами первого сумматора, выход датчика ЗДС соединен с третьим входом первоегулятора, четвертый вход котосоединен с вторым входом перво113878 10 Динамический режим ограничения М в регуляторе 27 наступает, когда сигнал на первом входе компаратора 49 превзойдет сигнал, поступающий на его второй вход; При этом на пер- З вом и втором выходах компаратора 49 появляются соответственно положительный и отрицательный сигналы, равные по модулю. Компаратор 48 и ключ 53 подключают вход корректирую щего усилителя 46 к первому или второму выходу компаратора 49 соответственно при отрицательном и положительном значениях сигнала М К , присутствующего на четвертом входе регулятора 2, Выходной сигнал компаратора 49, проходя корректирующий усилитель 46 и сумматор 36, дифференцируется блоком 34, интегрируется интегратором 33 и поступает соответ-ственно на первый и второй выходы регулятора 27. Изменения выходных сигналов регулятора 27 приводят к уменьшению модуля сигнала МКт, поступающего на его четвертый вход, и исчезновению сигналов на выходах компаратора 49. Выходной сигнал интегратора 33, поступая на второй 17выходы регулятора 27. На выходе интегратора 33 наблюдается линейно растущий сигнал, пока усилитель 37 находится в состоянии насыщения, Сигнал на выходе сумматора 35 линей но уменьшается, приближаясь к нулю. В момент дс 0 тижения выходным сигналом сумматора 35 значения ф РК МД усилитель 37 выходит из насыщения и происходит согласование сигналов О и О . В момент равенства О = О 6 регулятор 27 возврашается в статическое состояние.Динамический режим торможения 15 в регуляторе 27 наступает в момент нарушения равенства 1= О 6 путем уменьшения (например, скачком) модуля сигнала Д . При этом на выходе компаратора 47 обеспечивается сигнал 20 логического "О", и уровень ограничения выходного сигнала усилителя 37 будет определяться сигналом О поступающим на третий вход регулятора 27. В режиме торможения модуль 25 выходного сигнала интегратора 33 линейно уменьшается. В остальном работа регулятора 27 в режиме торможения подобна его работе в режиме разгона. 3018вход сумматора 35, обеспечиваетсогласование сигналов О 1 и О 6В момент. наступления равенстваО : О 6 регулятор 27 возвращаетсяв статическое состояние,Динамический режим ограничениятока 1 двигателя в регуляторе 27наступает, когда сигнал на первомвходе компаратора 51 превзойдет сигнал, поступающий на его второй вход.При этом на первом и втором выходахкомпаратора 51 появляются соответственно положительный и отрицательный сигналы, равные по модулю.Компаратор 50 и ключ 54 подключаютвход корректирующего усилителя45 к первому или второму выходу компаратора 51 соответственно при отрицательном и положительном значенияхсигнала 1 К , присутствующего нашестом входе регулятора 27Выходнойсигнал компаратора 51, проходя корректирующий усилитель 45 и сумматор36, дифференцируется блоком 34,интегрируется интегратором 33 и поступает соответственно на первый и второйвыходы регулятора 27. Изменение выходных сигналов регулятора 27 приводит к уменьшению модуля сигналаК , поступающего на его шестойвход, и исчезновению сигналов на выходах компаратора 51. Выходной сигналинтегратора 33, поступая на второйвход сумматора 35, обеспечиваетсогласование сигналов 01 и О . В момент наступления равенства О : О 6регулятор 27 возвращается в статическое состояние. Возможны случаи, когда указанным динамическим режимам предшествует не статический, а один из динамических режимов регулятора 27.Существенные отличйтельные признаки (введение регулятора, корректирующих усилителей и соответствующее изменение связей между элементами) предлагаемого устройства обеспечивают последнему положительный эффект: самонастройку от вариаций жесткости упругого элемента и момента инерции на его выходе.Следствием положительного эффекта при применении предлагаемого устройства вместо известных является технико-экономический эффект. При этом величина экономического эффекта во многом определяется особенностями технологического процессаи технологических агрегатов, для управления которыми используется предлагаемое устройство..Рассмотрим в качестве базового объекта широко используемые в металлургическом производстве для управления скоростью прокатных валков (главных приводов клетей) подчиненные системы управления с последовательной коррекцией. Экспериментальное исследование таких систем показало, что отсутствие в последних (как и в известном устройстве) самонастройки (настройки) для параметров упругой механической передачи и связанных с ней моментов инерции вызывает в кинематических передачах последних крутильные колебания. При этом амплитуда колебаний упругого момента может достигать 3,7 Мн где Мн - номинальный крутящий момент прокатного валка. Установлено, что. крутильным колебаниям соответствуют неустойчивые режимы прокатки: буксовка и незахват металла, Явления незахвата металлапри прокатке приводят к увеличению некондиционной части, подлежащей обрезанию, переднего и заднего концов раската. Явление буксовки приводит к появлению в раскате бракованных участков, подлежащих вырезанию, или снижает качество (сортность) проката. Для обеспечения надежной работы электродвигателя в условиях крутильных колебаний пришлось усилить элементы якоря, имевшие недостаточный запас прочности. Кроме того, в ряде .случаев крутильные колебания приводятк поломке кинематических звеньев.Для предотвращения аварийных си"туаций (поломок) в этих условиях 5 приходится в кинематическую цепь устанавливать предохранительные муфты, что усложняет и повышает стоимость технологического оборудования. Практически 907. Разрушений 10 деталей машин имеют усталостный характер и происходят в результатедействия, переменных динамическихнагрузок, ярким примером которыхявляются крутильные колебания, 15 т.е. крутильные колебания снижаютдолговечность технологического оборудования.Таким образом, применение предлагаемого устройства вместо базо вого в прокатном производстве,позволяет получить экономическийэффект за счет удешевления конструкций электродвигателя и технологического оборудования (отпадает необ ходимость усиления элементов якоря электродвигателя и кинематических передач, не требуется установка предохранительных муфт) и увеличения срока эксплуатации электроЗо двигателя и технологического оборудования; снижение расхода металлав обрезь (брак) и повышение качества (сортности) проката достигаетсяликвидацией неустойчивых режимов 35 прокатки. ПОВышение производительности технологического оборудования достигается сокращением простоев (аварий, замена элементовпредохранительных муфт и т.,д.).1138787 оставит ехред Л орректор Н.Коро ор Р.Цици каз 1068 ит т 5 к илиал ППП "Патент", г. Ужгород, ул. Проект ь П.Кудрартяшова Тираж 863НИИПИ Государственногопо делам изобретений и13035, Москва, )И, Ра Подписа СССРийнаб., д.1138787 го интегратора и выходом второго корректирующего усилителя, вход которого соединен с выходом второго сумматора, выход датчика скорости соединен с вторым входом третьего сумматора и первым входом пятого сумматора, овторой вход которого .соединен с выходом второго интегратора, выход пятого сумматора соединен с входом первого корректирующего усилителя, третий выход коммутатора соединен с вторым входом четвертого сумматора, выход которого соединен с входом третьего корректирующего усилителя, выход которого соединен с третьим входом коммутатора.2. Система по.п. 1, о т л и - ч а ю щ а я с я тем, что второй регулятор содержит интегратор, блок дифференцирования, два сумматора, усилитель, четыре блока модуля, три функциональных преобразователя, два корректирующих усилителя, пять компараторов и три управляемых ключа, при этом первый вход второго регулятора соединен с первым входом первого сумматора, последовательно с которым соединены усилитель, второй сумматор и блок дифференцирования, выход которого соединен с пер - вым выходом второго регулятора, второй выход которого соединен с первым входом первого компаратора, вторым входом первого сумматора и выходом 1интегратора, первый вход которого соединен с выходом второго сумматора, второй и третий входы которого соединены с выходами соответственно первого и второго корректирующих усилителей, второй и третий входы второго регулятора соединены соответственно с первым и вторым входами первого ключа, управляющий вход которого соединен с выходом первого компаратора, второй вход которого соединен с выходом усилителя, второй вход которого соединен с выходом 1 Изобретение относится к автоматике и может быть использовано для управления промьппленными электроприводами, в которых связь с объектом первого функционального преобразователи, первый вход которого соединенс выходом первого ключа, четвертыйвход второго регулятора соединенс первым входом второго компаратораи входом первого блока модуля, выходкоторого соединен с первым входомтретьего компаратора, второй входкоторого соединен с выходом второгофункционального преобразователя,первый вход которого соединен свходом третьего функционального преобразователявыходом второго блокамодуля и вторым входом первого функционального преобразователя, пятыйвход второго регулятора соединенс входом третьего блока модуля, выходкоторого соединен с вторым входомвторого функционального преобразователя, шестой вход второго регуляторасоединен с первым входом четвертогокомпаратора и входом четвертогоблока модуля, выход которого соединенс первым входом пятого компаратора,второй вход которого соединен с выходом третьего функционального преобразователя, седьмой вход второгорегулятора соединен с входом второгоблока модуля и вторыми входами второго и четвертого компараторов, выходы которых соединены .с управляющими входами соответственно второгои третьего ключей, восьмой и девятый входы второго регулятора соединены с вторыми входами соответственноблока дифференцирования и интегратора, первый и второй выходы третьего компаратора соединены соответственно с первым и вторым входамивторого ключа, выход которого соединен с входом второго корректирующего усилителя, первый и второй выходы пятого компаратора соединенысоответственно с первым и вторымвходами третьего ключа, выход которого соединен с входом первого корректирующего усилителя. осуществляется с помощью упругоймеханической передачи и имеют местоизменения момента инерции на валудвигателя, жесткой упругой механи3 11387 ческой передачи, моментов нагрузки и инерции объекта; в роботостроении (в системах управления приводами рабочих органов манипуляционных Ро - ботов), в системах управления приво 5 дами главного движения металлорежущих станков, в металлургии (в системах управления приводами моталок и прокатных валков непрерывных прокатных станков, главными приводами обжимных и толстолистовых станов и т.д,) .Известна самонастраивающаяся система управления, содержащая после - довательно соединенные задатчик,15 первый сумматор, регулятор, усили - тель мощности и электродвигатель с установленными на нем датчиком регулируемой координагы и датчиком тока, выход которого через последователь 20 но соединенные второй сумматор, первый блок умножения, третий сумматор, первый интегратор, четвертый сумматор, второй блок умножения и второй интегратор подключен к управляющему входу регулятора и второму входу первого блока умножения, первый вход которого подключен к второму входу второго блока умножения, выход датчика регулируемой координаты ,соединен с вторым входом первого30 сумматора и вторым входом четверто - го сумматора, выход которого соединен с вторым входом третьего сумматора, последовательно соединенные третий интегратор, пятый сумматор и блок деления, второй вход которого соединен с выходом второго интегратора, а выход - с вторым входом второго сумматора, выход первого блока умножения подключен к входу третьего 40 интегратора, выход датчика регулируемой координаты подключен к второму входу пятого сумматора 11.Недостатком такой системы является отсутствие самонастройки от 45 вариаций момента нагрузки.Наиболее близким техническим решением к изобретению является система управления объектом с упругими связями, содержащая последовательно соединенные задатчик, регулятор, исполнительный механизм, подключенный к объекту, выход которого через последовательно соединенные датчик, идентификатор состояния объекта, 55 первый измеритель ошибки и формирователь сигнала управления, выход которого подключен к второму входу 87 4регулятора, выход которого подключен к второму входу идентификатора состояния объекта, второй выход которого через сумматор соединен с третьим входом регулятора, первый вход которого соединен с вторым входом первого измерителя ошибки, последовательно соединенные второй измеритель ошибки, формирователь сигнала коррекции и блок масштабных коэффициентов, выход которого подключен к третьему входу идентификатора состояния объекта, третий выход которого соединен с первым входом второго измерителя ошибки, второй вход которого соединен с выходом датчика, а второй вход формирователя сигнала коррекции с выходом первого измерителя ошибки Г 23.В известной системе требуемая динамика обеспечивается за счет корректирующего сигнала, формируемого сумматором и поступающего на вход регулятора основного контура, т.е. без перестройки регулятора основного контура. Поэтому известная система обладает ограниченными возможностями для объектов с изменяюшимися параметрами, а следовательно невысокими качеством и точностью регулирования.Цель изобретения - повышение качества и точности регулирования.Поставленная цель достигается тем, что в самонастраивающуюся систему управления, содержащую последовательно соединенные первый сумматор, первый регулятор, усилитель мощности, электродвигатель с устав , новленными на нем датчиком тока, датчиком скорости, датчиком ЭДС и датчиком тока возбуждения, и упругую механическую передачу, соединенную с технологическим механизмом, выходом подключенным к датчику скорости механизма, блок возбуждения, датчик упругого момента, соединенный с упругой механической передачей, задатчик, три интегратора, второй, третий, четвертый и пятый сумматоры, выход датчика тока возбуждения соединен с первым входом блока возбуждения, выход которого соединен с входом обмотки возбуждения электродвигателя, выход датчика скорости которого соединен с первыми входами первого, второго и третьего сумматоров, выход первого интегратора соединен с вторым входом второго сум-.матора, введены три корректирующихусилителя, коммутатор и второй регулятор, первый вход которого соединенс вторым входом блока возбужденияи первым выходом задатчика, второйи третий выходы которого соединенысоответственно с вторым и третьимвходами второго регулятора, четвертый вход которого соединен с первымвходом второго интегратора, выходом 10датчика упругого момента, первым входом четвертого сумматора и первымвыходом коммутатора, .первый вход которого соединен с выходом третьегоинтегратора, первый вход которого 15соединен с выходом третьего сумматораи пятым входом второго регулятора,шестой вход которого соединен с вторым входом первого регулятора, первымвходом первого интегратора и выходом 2 Одатчика тока электродвигателя, датчикскорости которого соединен с седьмымвходом второго регулятора, восьмойвход которого соединен с вторым входом третьего интегратора и вторым 25выходом коммутатора, второй входкоторого соединен с четвертым выходом задатчика, выход первого корректирующего усилителя соединен свторым входом второго интегратора щи девятым входом второго регулятора,первый и второй выходы которого соединены соответственно с вторым итретьим входами первого сумматора,выход датчика ЭДС соединен с третьимвходом первого регулятора, четвертыйвход которого соединен с вторымвходом первого интегратора и выходом второго корректирующего усилителя, вход которого соединен с выходом 4 Овторого сумматора, выход датчикаскорости технологического агрегатасоединен с вторым входом третьегосумматора и первым входом пятого.сумматора, второй вход которого соединен с выходом второго интегратора,выход пятого сумматора соединен свходом первого корректирующего усилителя, третий выход коммутаторасоединен с вторым входом четвертогосумматора, выход которого соединенс входом третьего корректирующегоусилителя, выход которого соединенс третьим входом коммутатора. Кроме того, второй регулятор содержит интегратор, блок дифференцирования, два сумматора, усилитель, четыре блока модуля, три функциональных преобразователя, два корректирующих усилителя, пять компараторов и три управляемых ключа, при этом первый вход второго регулятора соединен с первым входом первого сумматора, последовательно с которым соединены усилитель, второй сумматор и блок дифференцирования, выход которого соединен с первым выходомвторого регулятора, второй выход которого соединен с первым входом первого компаратора, вторым входом первого сумматора и выходом интегратора, первый вход которого соединен с выходом второго сумматора, второй и третий входы которого соединены с выходами соответственно первогои второго корректирующих усилителей, второй и третий входы второго регулятора соединены соответственно с первым и вторым входами первого ключа, управляющий вход которого соединен с выходом первого компаратора, второй вход которого соединен с выходом усилителя, второй вход которого соединен с выходом первого функционального преобразователя, первый вход которого соединен с выходом первого ключа, четвертый вход второго регулятора соединен с первым входом второго компаратора и входом первого блока модуля, выход которого соединен с первым входом третьего компаратора, второй вход которого соединен с выходом второго функционального преобразователя, первый вход которого соединен с входом третьего функционального преобразователя, выходом второго блока модуля и вторым входом первогофункционального преобразователя, пятый вход второго регулятора соединен с входом третьего блока модуля, выход которого соединен с вторым входом второго функционального преобразователя, шестой вход второго регулятора соединен с первым входом четвертого компаратора и входом четвертого блока модуля,.выход которого соединен с первым входом пятого компаратора, второй вход которого соединен с выхо-: дом третьего функционального преобразователя, седьмой вход второго регулятора соединен с входом второго блока модуля и вторыми входами второго и четвертого компараторов, выходы которых соединены с управляющими входами соответственно второго и187 8Р, Я), опредсляемая уравнением (5),суч 1 тывает Влия ние нл с корос т ь механизма величин 3с) и М . Й) . Поэтому описания объекта уравнения 5 с помощью уравнений (1) (3) и уравнекий 35 являются адекватнымиВ дальнейцембудем использовать .Уравнения (6)(8).Переходя к изображениям Лапласауравнений (6) - (8) для конкретных рО значений Г , Р, и Р и преобр аз Овыва я их и Ол учим(Р)м (р) - Е, рУравнения (9) - (11) определяютСсвязь (передаточные функции) междукоординатами (.р) , с 4(р) М(р)и ир) системы для нулевых начальньж ус,повий, ф(Ц 1(ц-ю251 1 А - М (1) и ф: тр ет ье ГО ключ РЙ Бос ьмОи и деня тый входы второго регулятора соединены с вторыми входами со отв етств ен но блока дифференцирования и интегратора, первый и второй выходы третьего компаратора соединены соответственно с первым и вторым входами второго ключа, выход которого соединен с выходом второго корректируюцего усилителя, первый и второй выходы пято О го компаратора соединены соответственно с первым и вторым входами третьего ключа, выход которого соединен с входом первого корректирующего усилителя.Связь между скоростьюмоментом Мэ(или током 1 ) электродвигателя, упругим моментом М,механической передачи, скоростью со механизма (технологического агрегата) и статическим моментом Ис на валу механизма описывается.уравнениямиЮ (с)-М ЗО( ) Л; (3)сгде (1) - момент инерции электродвигателя;Ззф(1) - поток возбуждения электродвигателя;К - коэффициент пропорциональности между токоми потоком возбужденияэлектродвигателя,2 Й) - момент инерции механизма1+) И=ы (1= М. (ь)м рВеличина 1(1) определяемая урав нением (4), учитывает влияние на скорость электродвигателя величин 3 И), ф Й), Ч (Ф), а величина и Щ= й;1,И)М,И)и= д 1; (1)ММ (,)дый)с 1, (8)с 1,Я) На фиг. 1 приведена схема самонастраиваю 1 цейся системы управления; на фиг. 2 - схема второго регулятора.Система содержит первый сумматор 1, первый регулятор 2, усилитель 3 мощности, электродвигатель 4 с установленными на нем датчиком 5 тока, датчиком 6 скорости, датчиком 7 ЭДС и датчиком 8 тока возбуждения, упругую механическую передачу 9, технологический механизм 10, датчик 11 скорости механизма блокоЭ 12 возбуедения, датчик 13 упругого момента, задатчик 14, первый интегратор 15, второй интегратор 1 б, третий интегратор 17, второй сумматор 18, третий сумматор 19, четвертый сумматор 20, пятый сумматор 21, обмотку 22 возбуждения, первый 23, второй 24 и третий 25 корректирующие усилители, коммутатор 26 и второй регулятор 27.Первый регулятор 2 содержит пропорциональное звено 28, блок 29 умно113879жения, шестой сумматор 30, пропорционально-интегральное звено 31 и седьмой сумматоу 32.Второй регулятор 27 содержит интегратор 33, блок 34 дифференцирова ния, восьмой 35 и девятый 36 сумматоры, усилитель 37, первый 38, второй 39, третий 40 и четвертый 41 бло" :ки модуля, первый 42, второй 43 и третий 44 функциональные преобра зователи, четвертый 45 и пятый 46 корректирующие усилители, первый 47, второй 48, третий 49, четвертый 50 и пятый 51 компараторы и первый 52, второй 53, третий 54 управляемые 15 ключиВ качестве технологического механизма 10 могут использоваться,например, рабочие валки прокатнойклети. При этом роль упругой механи-ческой передачи 9 играет шпиндель,соединяющий вал электродвигателя 4с прокатными валками.В качестве датчиков 6 и 11 скорости могут использоваться, например, тахогенераторы или импульсныедатчики угла поворота. На выходедатчика 11 скорости наблюдаетсясигнал ю К где ш - скорость механизма (прокатного валка), акоэффициент передачи датчика 11 скорости. На выходе датчика 6 скоростинаблюдается сигнал о К , где мэскорость вала электродвигателя,а К - коэффициент передачи датчика 56 скорости.Датчик 13 упругого момента может быть выполнен, например, на тензометрических элементах. На выходе40 датчика 13 наблюдается сигнал Ю К где М . - упругий момент, а К. коэффициент передачи датчика 13.Электродвигатель 4 представляет45 собой двигатель постоянного тока незавиСимого возбуждения.Датчик 5 тока электродвигателя 4 обеспечивает на своем выходе сигнал 1 Кт, где 1 - ток электродвигателя, а К - коэффициент передачи датчика 5.Датчик 7 ЭДС (электродвижущей силы) электродвигателя 4 формирует на своем выходе сигнал, пропорциональный ЭДС по сигналам датчика 6 скорости и датчика 8 тока возбуждения. При этом коэффициент передачи )датчика 7 выбирается из условия10 87 равенства (1) произведения коэффициента усиления усилителя 3 мощности и коэффициента передачи датчика 7 ЭДС.Датчик 8 тока возбуждения обеспечивает на своем выходе сигнал, пропорциональный току возбуждения электродвигателя 4.Усилитель 3 мощности обеспечивает усиление выходного канала в соответствии с передаточной функциейм р) = (12)Р где Км и ТР - коэффициент передачи и постоянная времени усилителя 3 мощности. Если передаточную функцию пропорционально-интегрального звена 31 принять, (Т, +1) (р)-,, ;) с ТК К р2 Т м где Р и Т - активное сопротивле- Я ние и постоянная времени якорной цепи электродвигателя 4; в и О 2 - коэффициенты, то передаточная функция % (р 1 контура регулирования тока якоря примет д а (р) (14) ,22 2 2Блок 29 умножения обеспечивает умножение выходного сигнала пропорционального звена 28 на величину 1 К ДЯпоступающую на его второй вход с четвертого входа регулятора 2, При этом, если коэффициент передачи пропорционального звена 28 принять 1 Ь ц а Т(11.2 то передаточная функция %(р) контура регулирования скорости Ыэ электродвигателя 4 примет вид %,Р)3 З 5 2 К,а,Т р+а Т р+ м Т2 12 РПодставляя в .полином знаменателя передаточной функции (16) новую переменнуЮ 5: ы 2 ТР, получим нормированное значение характеристического полинома передаточной функции (16) 52+а 5 +а 3+1 . И 1)2 15 Корректирующие усилители 23-25 обеспечивают преобразование и усиление сигналов, поступающих соответственно на их входы. Закон преобра зования зависит от требований к точности вычисления параметрови 1 . В ряде случаев достаточно3пропорционального закона преобразования. Для высоких требований к точности вычислений закон преобразования корректирующих усилителей должен включать в себя интегральную составЛяющую.Задатчик 14 обеспечивает на своих 40 выходах 1-4 соответственно сигналыс "с / Кт где в - требуемое значение скорости вала электродвигателя 4 (механизма 10), Мр и М требуемые значения упругого момента соответственно при разгоне и торможении механизма. Регулятор 27 обеспечивает управление упругим моментом ф при раз О гоне и торможении механизма 10в соответствии с динамическими характеристиками контура регулирования скорости .электродвигателя 4, определенными передаточной функцией (16) и осуществляет функцииконтроля и ограничения токаэлектродвигателя 4 и момента упругого 11 113878Выражение (,17) показывает, что требуемая динамика контура регулирования скорости Ф , задается с помощью соответствующего выбора коэффициентов с 4 и 4 и подстав ки их в передаточные функции (13) и (15),Сумматор 1 обеспечивает суммирование сигнала и К , поступающего на его первый (инверсный) вход, с 10 сигналами задания, поступающими на второй и третий входы сумматора 1; При этом передаточная функция по скорости ю относительно второго (или третьего) входа сумматора 1 имеет вид (16).Интеграторы 15-17 имеют регулируемые постоянные интегрирования и обеспечивают интегрирование величин, поступающих соответственно 20 на их первые входы. При этом величины их постоянных интегрирования определяются соответственно сигналами, поступающими на их вторые входы. 25 7 12Му в случае превышения последними допустимых уровней.В статическом режиме (отсутствуют режимы разгона или торможения механизма и величины 1 и А не прехвосходят допустимых уровней) на первом выходе регулятора 27 наблюдается нулевой сигнал, а на втором - повторяется сигнал У поступающий на его первый вход.Динамический режим разгона механизма наблюдается, когда сигнал 0 превьшает по модулю сигнап на втором выходе регулятора 27. В этом режиме на и ервом выходе р е гуля тора 27 обеспечивается сигнал О 5 (Р)= с РКс Мр(Р) 1к,м,(р)а на втором-О ( )= СлсдоваРтельно, передаточная ФУнкция %(Р) регулятора 27 для режима разгона механизма имеет видч ( ) 6(Р ь(Р) с (з 1 О (р 1 К , Р РГр+1( 18)Б периоды времени, когда разностьО )-10 С Р т , где р - коэффиМ К1 61циент усиления усилителя 37 передаточная функция регулятора 27 принимает вид К % Р р+1а (Р): - . ( )р с с 2з рк крКтДинамическй режим торможения механизма наблюдается, когда сигналО меньше по модулю сигнала 0В этом режиме на первом выходе регулятора 27 обеспечивается сигнал05 (Р 1=Рс РКс Мт(Р), а на втором --0 (р)- с т . Следовательно,км (р)ьпередаточная функция регулятора 27 будет описываться выражением (17), в котором вместо сигнала 0(р) нужно использовать сигнал О 5(р) В периоды времени, когда разйость ) О 1)- О) ( - ф- Кт передаточнаяМфункция регулятора 27 принимает виц (18).Поскольку ф выбирается величиной весьма большой, .то составляющая переходного процесса, обусловленная корнем, быстро затухает и можетФункциональный преобразователь4.3 обеспечивает на своем выходе величину, изменяющуюся в функции сигнала, поступающего на его второйвход, при этом масштаб функции (выходной величины функциональногопреобразователя 43) определяетсясигналом, поступающим на первыйвход Функционального преобразователя 43. Функция, реализуемая функциональным преобразователем 43,уменьшается с увеличением аргумента.Характер уменьшения зависит от динамических характеристик объекта исистемы управления. В первом приближении функция может быть реализована, как линейно уменьшающаясяс ростом аргумента,Функциональный преобразонатель44 реализует зависимость 1 : (и,)которая приводится в клиентском Формуляре для электродвигателя 4. Величина 1 характеризует максимально допустимый ток электродвигателяКорректирующие усилители 45 и 46обеспечивают усиления и преобразования.сигналов, поступающих соответственно. на их входы. Законы преобразования входных сигналов усилителей 45 и 46 зависят от требований к точности ограничения величини М . В большинстве случаевдостаточно пропорциональных законовпреобразования входных сигналов,более высокие требования к точностиограничения величин 1 и М назаданном уровне можно обеспечить,вводя операции дифференцированияв законы преобразования входныхсигналов усилителей 45 и 46. В случае пропорциональных законов преобразования функции корректирующихусилителей 45 и 46 могут выполнятьсоответственно компараторы 51и 49. При этом схема регулятора 30 не рассматриваться н переходномпроцессе. В результате получимф) (р) - рффиВид Функции, реализуемой Функциональным преобразователем 42, определяется характеристиками электродвигателя 4 и технологического процесса, обуславливаемого самонастраивающейся системой управления.В большинстве случаев указанная Функ ция имеет отрицательную производную. 27 может быть упрощена за счет ис - ключения из нее корректирующих усилителей 45 и 46.Рассмотрим работу системы в динамическом режиме на примере разгона механизма 10 (электродвигателя 4) до новой установившейся скорости, Режим разгона в системе начинается с момента увеличения по модулю (например, скачком) сигнала О на первом входе задатчика 14, При этом на втором выходе задатчика 14 наблюдается сигнал О 2 = Кт Мр , содержащий информацию о требуемом значении Фр момента упругого М н процессе разгона.Передаточная функция 41 р) для момента упругого по второму (или третьему) входу регулятора 27 определится выражениемм (р) К фм(Р)- -- 1,Р) с(Р) з 1(Р)- с(Р)(ао) где 6 (Р)ЧЧс (р) и Фэ 1 (Р) - передаточные Функции, определяемые уравнениями (10), (16) и (17).Уравнение 19) показывает, что в процессе разгона механизма 10 поведение 9 будет определяться динамическими характеристиками передаточной функции 1 Яс(р) и не зависит от вариаций параметрови 1, , так как в системе управления непрерывно осуществляется определение Фактических значений параметров Р, Р, и 1 , и обеспечивается соответствующая перестройка параметров регуляторов 2 и 27 практически син - хронно с вариациями параметрови 1 с . Это обеспечивает благодаря тому, что время определения значений 1 , 1 и 1 с во много раз меньше времени переходного процесса системы, определяемого передаточной функцией %)р),По мере разгона механизма 10 с заданным значением момента упругого сигнала О на втором выходе регулятора 27 возрастаетприближаясь к значению сигнала О . В моментР твремени, когда (О)-)1): т, переда 1рточная функция % (р) принимает видсФ (Р)- РЩ Р)мент наступления равенства О = О,5 10 15 20 25 30 35 40 45 50 55 возвращается в статическое состояние, соответствующее новому, установившемуся значению скорости ША.Работа системы управления в режиме торможения механизма 10 подобна работе, для режима разгона.Рассмотрим динамический режим работы системы, обусловленный возмущающими воздействиями, например, изменением момента нагрузки на валу механизма 10. Изменение момента нагрузки на валу .механизма 10 приводит к изменению и,ц, М и оэ и соответствующими, изменениями параметров Г, и 0 . Изменение параметра 11 приводит к перестройке регулятора 2, вызывая изменения тока, стабилизирующие скоростьщ и, в конечном итоге, скорость 04, механизма. При этом регулятор 27 непрерывно следит за текущим значением М . Если изменения момента нагрузки на валу механизма носят плавный характер, то, как правило, стабилизирующий эффект, обусловленный перестройкой регуля - тора 2, является достаточным для стабилизации скорости ьо . Быстрые и значительные по амплитуде изменечия момента нагрузки на валу механизма вызывают выход М за допустимые (контролируемые регулятором 27) значения. В данном случае в работу вступает регулятор 27, который, корректируя свои выходные сигналы, изменяет скорость ц так, чтобы противодействовать росту модуля Му, резко уменьшая коле - бательность М при.переходе к новому установившемуся значению. Характер перехода М к новому установившемуся значению зависит от полосы пропускания (частоты среза) передаточной функции % (Р 1 . Если полоса пропускания перекрываетЧзначение , то характер пере 2 сходного процесса Му будет определяться динамическими характеристиками передаточной Функции Фс(р). Поэтому при конструировании системы необходимо добиваться наименьшего значения параметра Т передаточной функции Я (р), а конструктивные параметры механизма 10, определяющие значения 1 и 1 , должны выбираться (проектироваться) так, чтобы значение частоты ,пере 2 с крывалось полосой пройускания передаточной функции В (р.Рассмотрен динамический режим работы, обусловленный изменением момента нагрузки на валу механизма. Порядок работы системы остается аналогичным и для других возмущающих воздействий ( 3 , 32, с и Ф и т,д.), так как изменения последних распознаются системой через соответствующие изменения обобщенных параметров, 2, 1 и М,Регулятор 27 непрерывно контролирует модуль токаэлектродвигателя 4, Если модуль токапо каким-либо причинам, как правило аварийным, начнет превосходить допустимые значения, то регулятор 27, корректируя свои выходные сигналы, противодействует выходу тока за допустимые пределы. Если причина, вызывающая увеличения модуля тока 1, самоустраняется, то регулятор 27 автоматически возвращает систему в исходное состояние на заданный уровень скорости.Рассмотрим работу регулятора 27.Регулятор может работать в четырех динамических режимах: разгона, торможения, ограничения момента упругого М и ограничения тока двигателя. Динамический режим разгона наступает, когда сигнал О, , поступающий на первый вход регулятора 27, превзойдет по модулю сигнал О присутствующий на его втором выходе. Допустим, что в исходном состоянии (статическом) на первом входе и втором выходе присутствовали положительные сигналы, О = О . В момент увеличения сигнала О (например, скачком) на выходе сумматора 35 и усилителя 37 появляются положительные сигналы. На выходе компаратора 47 обеспечивается сигнал "логической 1" и подключается первый вход ключа 52 к его выходу.Сигнал 02 с второго входа регулятора 27 через функциональный преобразователь 42 поступает на второй вход усилителя 37, определяя уровень ограничения выходного сигнала усилителя 37. Выходной сигнал усилителя 37, проходя сумматор 36, дифференцируется блоком 34, интегрируется интегратором 33 и поступает соответственно на первый и второй
СмотретьЗаявка
3567831, 24.03.1983
НОВОКУЗНЕЦКОЕ ОТДЕЛЕНИЕ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ВСЕСОЮЗНОГО НАУЧНО-ИССЛЕДОВАТЕЛЬСКОГО ПРОЕКТНОГО ИНСТИТУТА ТЯЖПРОМЭЛЕКТРОПРОЕКТ ИМ. Ф. Б. ЯКУБОВСКОГО
ОРЕЩЕНКО РУДОЛЬФ АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: самонастраивающаяся
Опубликовано: 07.02.1985
Код ссылки
<a href="https://patents.su/13-1138787-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Способ получения производных бензокарбазолаизобретение относится к области получения новых соединений, которые могут найти применение в синтезе биологически активных веществ. предлагаемый способ получения произ

Номер патента: 255277
Опубликовано: 01.01.1969
Авторы: Всесоюзный, Гринев, Курило, Шведов
МПК: C07D 209/80
Метки: активных, бензокарбазолаизобретение, биологически, веществ, которые, могут, найти, новых, области, относится, предлагаемый, применение, произ, производных, синтезе, соединений
...Орджоникидзе255277 15 Предмет изобретения ко Составитель Л. Езерская Тскред Л. Я. ЛевинаКорректор О, И, Усова Редактор С. Лазарева Заказ 5342 Тираж 480 ПодписноеЦНИИПИ Комитета по делам изобретений и открытий при Совете Министров СССРМосква Ж, Раушская наб., д. 4/5 Типография, пр. Сапунова, 2 П р и м е р 2. 1,4-Дигидро-кето-б-метокси.9-метил (2,3) бензокарбазол (циклизацией 1- метил-бензил-метоксииндолил- карбоновой кислоты).Для опыта берут 5 г (0,017 моль) 1-метил-бензил-метоксииндолил-карбоновой кислоты и 250 г полифосфорной кислоты. Реакцию и выделение вещества проводят в условиях примера 1. Выход 1,4-дигидро-кето-бметокси-метил (2,3) бензокарбазола 4,3 г (93,5% ); т, пл. 153 в 1 С (из ледяной уксусной кислоты).Найдено, %: С 78,02;...
Способ получениягетероциклических производныхциклопентадиена, или индена, или азулена1изобретение относится к области получения новых соединений, которые могут найти применение как полупродукты в синтезе биолог

Номер патента: 434076
Опубликовано: 30.06.1974
Авторы: Самойленко, Шейнкман
МПК: C07C 13/15, C07C 13/465, C07C 13/52
Метки: азулена1изобретение, биолог, индена, которые, могут, найти, новых, области, относится, полупродукты, получениягетероциклических, применение, производныхциклопентадиена, синтезе, соединений
...бензола, при комнатной или при температуре кипения ассы с последующим выделениродукта известным способом.434076 3вают при 60 - 70 С 2 - 3 час и затем кристаллизуют из бензола. Выход 1-(2-бензоил,2- дигидроизохинолинил) -индена 14,5 г (83%); т. пл. 116 в 1 С; ИК-спектр, см-: 1660 (С=О).Найдено, %: С 85,12; Н 5,75; К 3,94, С 2 зН 1 зМО.Вычислено, %: С 85,93; Н 5,47; К 4,00,П р и мер 2. 1-(1-Бензоил,4 - дигидропиридил)-азулен.К смеси 4,8 г (0,06 моль) пиридина добавляют 4,2 г (0,03 моль) хлористого бензоила и 3,8 г азулена и реакционную массу нагревают при 80 - 85 С в течение 10 час, после чего перегоняют с паром. Не вступивший в реакцию азулен отгоняют с водяным паром, остаток отделяют, сушат и кристаллизуют из смеси бензола и...
Устройство, реагирующее на небольшие изменения напряжения на входе более крутым линейным изменением напряжения на выходе

Номер патента: 116923
Опубликовано: 01.01.1958
Автор: Трифонов
МПК: H01F 30/02
Метки: более, входе, выходе, изменением, изменения, крутым, линейным, небольшие, реагирующее
...4, Автотренсформатор 5 служит для согласования входа усилителя с напряжением сети. Трансформаторы 1 и 2 включены таким образом, что при отсутствии резонанса в первичном контуре насыщенного трансформатора э.д.с, вторичных обмоток находятся в фазе и поэтому до начала резонанса вторичные напряжения суммируются алгебраически, После наступления116923феррорезонанса вто 1."., ые напряжения трансформаторов находятся в противофазе.Кривая б (фиг. 2) изображает зависимость вторичного напряжения насыщенного трансформатора от входного напряжения сетиснятую опытным путем на холостом ходу, т, е. при отсутствии нагрузки на выходе.Кривая 7 изображает ту же зависимость для ненасыщенного трансформатора.Кривая 8 изображает ту же зависимость для...
Источник питания с бестрансформаторным входом

Номер патента: 1554092
Опубликовано: 30.03.1990
Автор: Эраносян
МПК: H02M 7/21
Метки: бестрансформаторным, входом, источник, питания
...ограниченрезистором 37,. Когда напряжение наобмотке трансформатора 2 9 меняетзнак, открывается диод 36 и на базутранзистора преобразователя 3 поступает запирающее напряжение, Когданапряжение на обмотке трансформатора30 меняет знак, открывается диод 35и запирающее напряжение прикладыва-ется к переходу база - эмиттер транзистора преобразователя 3, В моментвремени, когда оба напряжения на обмотках трансформаторов 29 и 30 отрицательны, обратное запирающее напряжение возрастает вдвое, Это напряжение показано на фиг, 6 (731). Работаузла геометрического сложения 32 аналогччна работе узла 31, только отпираюшее напряжение, поступающее на транзистор преобразователя, сдвинуто на180 эл. град, относительно положительного напряжения на выходе...
Пневматический регулятор

Номер патента: 664154
Опубликовано: 25.05.1979
МПК: G05B 11/50
Метки: пневматический, регулятор
...Формула изобретения 1. Пневмоавтоматика.М.,Науками ,1966, стр, 96-.104, рис. 8.2. Берендс Т.К. и др, Элементы 45 и схемы пневмоавтоматики. М.,Машинос трое ние, 1 968, с тр. 14 8-1 5 О,рис. 97. иг ИИПИ Заказ 2999/45 раж 1014 Подписное Ф3.сравнения 7. Минусовая ивторая плюсовые камеры сумматора 4 соединены соответственно с каналом - - .параметра Рп и выходом задатчика опорного давления Р, Выход сумматора 4 соединен с первым входом дроссельного делителя 6, второй вход которого связан с выходным каналом регулятора Р , и выходом второго элемента сравнеййя 7, минусовая камера которого подключена к выходу дроссельного де" лителя б, 10Регулятор работает следующим образом:.В соответствии со схемой включения динамика регулятора...
Предыдущий патент: Устройство для управления движением адаптивного транспортного робота
Следующий патент: Дроссельное устройство
Случайный патент: Устройство для питания анодных цепей радиопередатчика кратковременными импульсами напряжения