G05B 19/416 — отличающееся управлением скоростью, ускорением или замедлением
Цифровая система для программного управления
Номер патента: 1441352
Опубликовано: 30.11.1988
Автор: Павлов
МПК: G05B 19/18, G05B 19/416
Метки: программного, цифровая
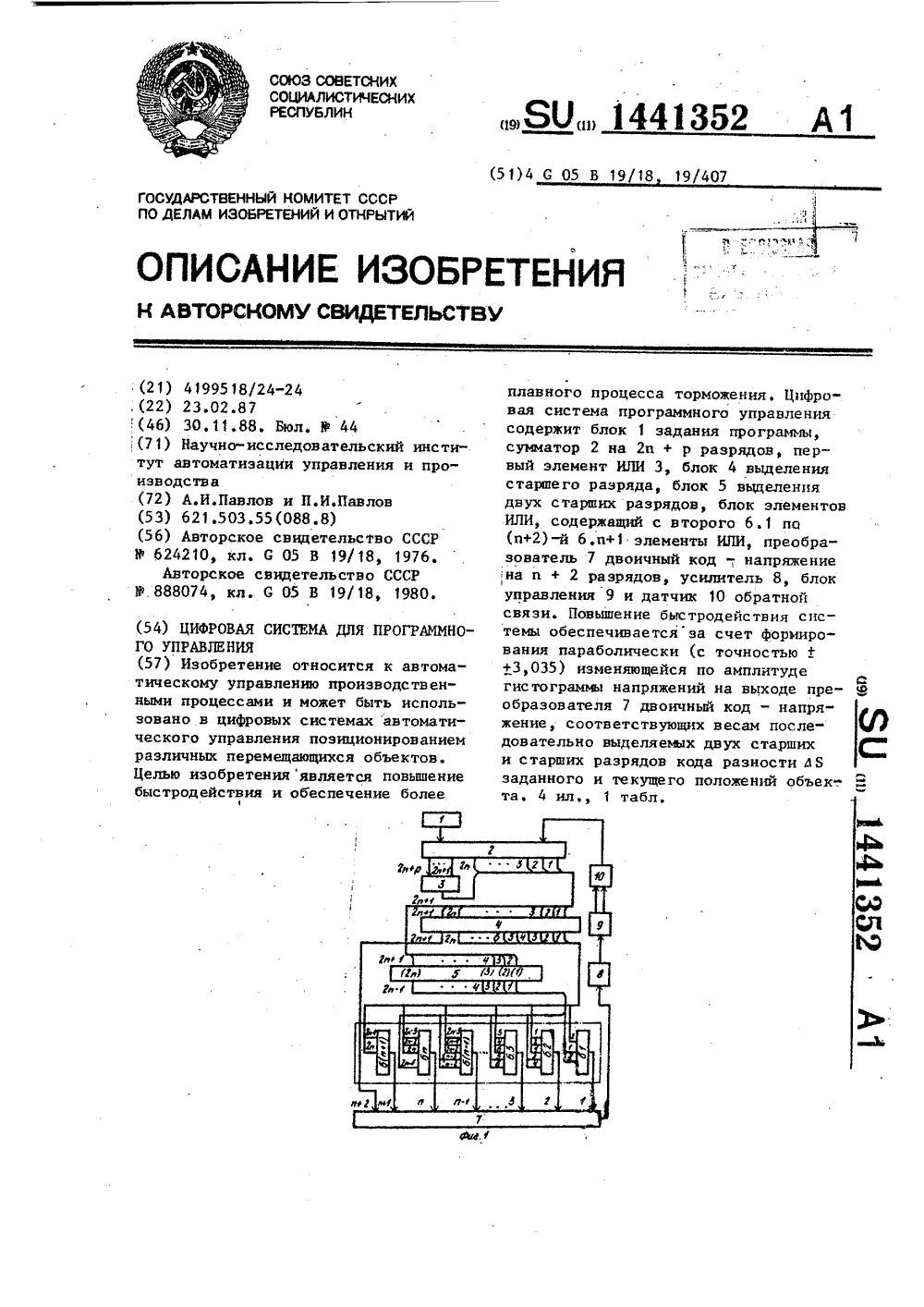
...кода разности дЯ, поступающих непосредственно в блок 4 выделения старшего разряда и равных2 п, определяет максимально требуемый путь торможения Яс номинальнойскорости Ч, Например, при3276,7 мм,= 0,1 мм и Я.,=51,2 ммк входам первого элемента ИЛИ 3должно быть подключено пять разрядов(соответствующих степенным числам2, 2", 2 12 2и 2 ) выходасумматора 2, а общее количество выходов этого сумматора равно пятнадцати.При помощи элементов ИЛИ 6.1"6(п++1), а также блока 4 выделения старшего разряда и блока 5 выделения двухстарших разрядов на цифровые входыпреобразователя 7 двоичный код - напряжение подается информация из сумматора 2 в соответствии с таблицей,Эта информация соответствует умноженному на 2 квадратному корню из весов...
Цифровая система программного управления
Номер патента: 1508192
Опубликовано: 15.09.1989
Автор: Павлов
МПК: G05B 19/18, G05B 19/416
Метки: программного, цифровая
...увеличение коэффициента преобразования преобразователя 8 в 42 разпри выявлении старшегоразряда четного разряда кода разности ЬЯ, Коэффициент преобразования преобразователя8 уменьшается обратно до исходногозначения, когда старший разряд кодаразностиЯ нечетный. Изменение коэффициента преобразования преобразователя 8 может быть выполнено различными способами, например с помощью управляемого электронного ключа, переключающего резисторы в цепи обратнойсвязи суммирующего усилителя в преобразователе 8,40Аналоговый сигнал с выхода преобразователя 8 двоичный код - напряжение через усилитель 9 поступает наблок 1 О управления, перемещающийобъект, и датчик,11 обратной связи,Код текущего положения объекта с выходов датчика 11 обратной...
Модуль для программного управления электроприводом

Номер патента: 1509832
Опубликовано: 23.09.1989
Авторы: Водопьянов, Завьялов, Морщаков, Цымбал, Яновский
МПК: G05B 19/18, G05B 19/416
Метки: модуль, программного, электроприводом
...на суммирующий вход импульсы с частотой Г увеличивают код на выходах реверсивного счетчика 5 импульсов, а следовательно, и частоту Г на выходе первого управляемого делителя 2 частоты. Одновременно реверсивный счетчик 6 разгона осуществляет подсчет (путем суммирования) импульсов с выхода усреднителя 24, выдаваемых в период разгона.увеличение кода в реверсивном счетчике 5 импульсов, а следовательно, и возрастание частоты Г на выходе первого управляемого делителя 2 частоты, равно как и частоты на выходе модуля, осуществляется до техпор, пока не совпадут значение кода на выходе реверсивного счетчика 5 импульсов и значение кода максимальной скорости, хранимое в регистре 15 максимальной скорости, В этом случае на выходе "Больше" второго...
Цифровая система для позиционирования электропривода постоянного тока

Номер патента: 1553955
Опубликовано: 30.03.1990
Авторы: Бонгард, Мовчан, Розов, Руденко, Фельдман, Холодный
МПК: G05B 19/18, G05B 19/416
Метки: позиционирования, постоянного, цифровая, электропривода
...22 частота Г следования импульсов определяется выражением И 16 ИЬ 1 т (т) = т.- = й 3 1 ИЬ о ИТ1 р 1 р3 6 ИЬ 1 р со ИТ 31 Р Пренебрегая динамической ошибкой в скорости, при движении электропривода можно записать для случая регулирования скорости в первой зоне Ч огр 3 Я( 12) где Ч - скорость перемещения рабочегооргана привода,Из соотношения (12) с учетом выражений (5), (6),и (11) уравнение скорости перемещения рабочего органа принимает вид Ьм 2 6 ИЬ 1 р7=2 й = -- (ГьИЬо ИТ1 р К ИЬ 1 р(9)1 ргде К = 12 - постоянный коэффициент.При этом знак частотного сигнала Еопределяется знаком И, кода счетчика 23, т.е, в период разгона привода в первой зоне при положительном И импульсы частоты Й суммируются в третьем счетчике 24, а при...
Устройство для управления скоростью вращения электродвигателя постоянного тока

Номер патента: 1564590
Опубликовано: 15.05.1990
МПК: G05B 19/416
Метки: вращения, постоянного, скоростью, электродвигателя
...формирования резкого скачкакорректирующего напряжения, что повело бы к ухудшению переходного процесса, В результате усиливается затухание переходного процесса и сокращается его длительность,Таким образом, первый корректирующий контур на стадии разгона такжеспособствует разгону электродвигателя 1 но гораздо в меньшей степенипо сравнению с основным контуром управления,Основной контур управления выводитэлектродвигатель 1, на подсинхронную40 скорость и далее благодаря действиюпервого корректирующего контура электродвигатель 1, входит в синхронизм,При этом реверсивный счетчик 10 черезблок 9 управления интегрирует разность частот импульсов от задающегогенератора 8 и датчика 4 скорости ичерез цифроаналоговый преобразователь1 и резистор 2...
Устройство для адаптивного управления металлорежущим станком

Номер патента: 1667008
Опубликовано: 30.07.1991
МПК: B23Q 15/12, G05B 19/416
Метки: адаптивного, металлорежущим, станком
...типом датчика силового параметра, коэффициент К усиления инвертирующего усилителя определяется требуемой глубиной обратной связи по реальной производной силового параметра и выбирается из условий обеспечения заданного качества переходного процесса в системе. Из этих же условий выбирается величина постоянной времени Т, Когда сигнал на выходе сумматора 9 станет больше величины О 1, определяющей нижний уровень стабилизации силового параметра М 1, на выходе компаратора 13 происходит изменение логического сигнала с высокого уровня на низкий, Когда сигнал на выходе сумматора9 становится больше сигнала О 2, определяющего верхний уровень стабилизации силового параметра Й 2, на выходе компаратора 14 логический сигнал изменяется с низкого...