Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1788163
Авторы: Коваленко, Овсянников, Остриров, Перепичаенко, Федченко








Текст
(19) 51)5 Е 02 Р 9/20, 3 ИЗОБРЕТЕНИ ОПИ ДЕТЕЛЬСТВ АВТОРСКОМ МЕЩЕНИЯМИ КОВША ЭКСКАВАТОРА ДРАГЛАЙ НА(57) Сущность изобретенижит датчик измерения длканата 1, датчик измерениканата 4, датчик угла пов7, три блока связи с датчикоммутатора 13, 14, 15, тртри ЦАП 19, 20, 21, три рения 22, 23, 24, три элементкоэффициентом усиленияключей 28, 29, 30, 40, 41,контроллера 31, 32, 33, три34, 35,36, блок задания ретор тактовых импульсовмаксимума 39, 3 ил,объединение "Новоост роител ьн ь 1 й заетический институт венный педагогичеКоваленко, Е,К,Пеикав и Н,Е,федченство СС 20, 1986 ое свидетел кл, Е 02 Р 9(54) СИСТЕМА АВТОМАТИЗИРОВАННОГ УПРАВЛЕНИЯ ТРАНСПОРТНЫМИ ПЕР 3 ОСУДАРСТВЕННЫИ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИПРИ ГКНТ СССР(71) Производственноекраматорский машинвод", Московский энерги Славянский гасударстский институт(56) АвтарскК. 1421836,я. система содерины подъемного я длины тягового арота платформы ком 10, 11, 12, три и ОЗУ 16, 17, 18, гулятора паложеа с регулируемым 25, 26, 27, шесть 42, три командопреобразователя жимов 37, генера, блок выбораИзобретение относится к управлению землеройной техникой, в частности к экскаваторам-драглайнам, имеющим автоматизированные системы управления процессом транспортировки ковша,Известно устройство оптимального управления электроприводами драглайна, обеспечивающее подъем ковша по траектории, при которой натяжение в канатах минимально (авт.св. М. 926163, кл, Е 02 Р 3/48, 10 Н 02 Р 5/00, 1979), Устройство содержит два магнитоупругие датчика усилий в опоре подшипников траверсы следящих блоков, включенные в измерительный мост, датчики скорости привода подъема и тяги соединенные с управляющей обмокой суммирующего магнитного усилителя, два потенциометра смещения, подключенные к входам фазочувствительного детектора, двадругих входа которого подключены к выходу промежуточного усилителя, питающегося от своего источника питания, трансформатор питания и привод тяги вход управления которого соединен с выходом суммирующего магнитного усилителя.Это устройство производит измерение величины натяжения подъемных и тяговых канатов по величине усилий в опорах подшипникеов следящих блоков, измеряет величину и направление текущей сксроси приводов подъема и тяги, определяет величину, характеризующую положение ковша в рабочей зоне по сумме измеренных величин усилия и скоростей, сравнивает ее с заданной величиной характеризующей зону само- разгрузки, и по величине рассогласования корректирует скорость привода тяги,Недосатком этого устройства является то, что оно предполагает ручное управлениеприводом поворота в цикле автоматизации, Кроме того у машиниста экскаватора в автоматическом режиме нет возможности выбора траектории движения груженого ковша, поскольку она определяется минимумом натяжения в подъемном и тяговом канатах,Известно также устройство управления капающими механизмами экскаватора в транспортном режиме (а.с, М. 1240839, Е 02 Р 9/20, 1982 г.), Устройство выполнено на базе микро-ЭВМ и содержит двигатель подъема, питающийся от преобразователя, управляемого от блока управления приводом подъема, двигатель напора питающийся от преобразователя напора управляемого с помощью блока управления приводом напора, двигатель поворота питающийся от преобразователя поворота, управляемого с помощью блока управления приводом поворота, при этом блоки управления приводами подъема напора и поворо 15202530 354045 50 55 та получают задание сооветственно от регуляторов угла наклона рукоятки, вылета рукояки и угла поворота поворотной платформы, а датчик угла наклона рукоятки, датчик вылета рукоятки, датчик положения поворотной платформы и датчик начала отсчета выходами связаны с программным блоком, подключенным к блоку ввода заданий,Это устройство осуществляет пространственное перемещение ковша экскаватора по траектории заданной перед началом работы машинистом, как при транспортировке ковша к месту разгрузки так и обратно в забой. Недостатком устройства является отсутствие гибкости автоматического управления, так как устройство не предусматривает задание траектории движения ковша по промежуточным точкам, фактически задаются только начальные и конечные точки заданной траектории. Это приводит к снижению производительности экскаватора при наличии препятствий в зоне движения ковша.Наиболее близким к предлагаемому устройству является устройство для осуществления способа управления драглайном (авт,св, Р 1421836, кл, Е 02 Р 9/20, 3/48, 1986), которое содержит блок регулирования привода подъема с командоаппаратом, соединенным с его первым входом, подключенным к электроприводу подъема, датчик статической составляющей тока, подключенный к первому входу первого усилителя, выход которого соединен с первым входом второго усилителя, выход которого подключен к второму входу блока регулирования привода подъема, выход датчика статической составляющей тока подключен также к первому входу релейного элемента, выход которого соединен с первыми входами первого и второго ключей, датчик расстояния от ковша до направляющих блоков, а также нелинейный элемент, блок регулирования скорости поворота с командоаппаратом, блок регулирования привода тяги с командоаппаратом, электропривод поворота и электропривод тяги, причем датчик расстояния от ковша до направляющих блоков соединен через нелинейный элемент с вторыми входами релейного элемента и первого усилителя, а с вторым входом второго усилителя связан выход командоаппарата привода подъема, выход релейного элемента соединен также с третьим входом блока регулирования скорости подъема, командоаппараты привода поворота и тяги соединены соответственно с вторыми входами первого и второго ключей, выходы которых подключены соответственно к блокам регулирования скорости поворота иприводам тяги, подключенным к электро- приводам поворота и тяги.Устройство обеспечивает исключение опасных динамических нагрузок для повышения срока службы подъемных канатов и уменьшения металлоемкости стреловой конструкции, Перед началом работы задается минимальное значение нагрузки привода подъема (ПП), равное весу упряжи Супр ковша и распоркой балки, которое обеспечивает поддержание "на весу" распорной балки и упряжи ковша, если ковш находится над головными блоками. При этом устройство по длинам подъемного и тягового канатов определяет положение ковша в пространстве и при необходимости корректирует заданное минимальное значение нагрузки привода подъема. После чего скорректированная нагрузка ПП сравнивается с текущей, При превышении ее уменьшается до нуля результирующий сигнал приводов поворота и тяги. Скорость ПП ограничивается значением (0,15-0,21) ее максимального значения.Существенным недостатком этого устройства является отсутствие автоматизации процесса транспортировки ковша,Целью изобретения является повышение производительности экскаватора-драглайна за счет автоматизации режима транспортировки ковша по требуемой траектории.Поставленная цель достигается тем, что известное устройство, содержащее датчик длины тягового каната, комадоаппарат электропривода тяги, соединенный с первым входом первого ключа и командоаппарат электропривода поворота, соединенный с первым входом второго ключа, снабжен датчиком длины подъемного каната, датчиком угла поворота, третьим, четвертым, пятым и шестым ключами, тремя элементами с регулируемым коэффициентом усиления, тремя регуляторами положения, блоками задания режимов и выбора максимума, генератором тактовых импульсов, тремя оперативными запоминающими устройствами, тремя цифро-аналоговыми преобразователями, тремя коммутаторами и тремя блоками связи с датчиками, при этом, выходы датчиков длины подъемного и тягового канатов и датчика угла поворота соединены с епрвыми входами третьего, четвертого и пятого ключей и, соответственно, первого, второго, и третьего блоков связи с датчиком, первые выходы последних соединены с первыми входами одноименных коммутаторов, выход каждого коммутатора соединен с шиной данных одноименных оперативных запоминающих ус 5 10 15 20 25 30 35 40 45 50 55 тройств и первыми входами одноименных цифро-аналоговых преобразователей, выходы первого, второго и третьего цифроаналоговых преобразователей подключены к первым входам одноименных регуляторов положения, ко вторым входам которых, подключены вторые выходы соответствующих блоков связи с датчиком, выходы последних подключены, также, к первому, второму и третьему входам блока выбора максимума, первый, второй и третий выходы которого подключены, соответственно, ко вторым входам третьего, четвертого и пятого ключей и входам первого, второго и третьего цифро-аналоговых преобраозвателей, выход генератора тактовых импульсов подключен к первым входам первого, второго и третьего оперативных запоминающих устройств, ко вторым входам которых подключены объединенные между собой выходы третьего, четвертого и пятого ключей, командоаппарат электропривода подъема подключен к первым входам шестого ключа и элемента с регулируемым коэффициентом усиления, командоаппараты электроприводов тяги и поворота подключены, также, к первым входам второго и третьего элементов с регулируемым коэффициентом усиления, выходы первого, второго и третьего регуляторов положения подключены ко вторым входам одноименных элементов с регулируемым коэффициентом усиления, при этом, выход первого, второго и третьего элементов с регулируемым коэффициентом усиления обьединены с выходами, соответственно, шестого, первого и второго ключей и подключены к соответствующим электро- приводам подъема, тяги и поворота, первый выход блока задания режима подключен ко вторым входам первого, второго и шестого ключей, второй выход блока задания режима подключен ко вторым входам первого, второго и третьего коммутаторов и к третьим входам первого, второго и третьего оперативных запоминающих устройств, а третий выход блока задания режима подключен к четвертому входу блока выбора максимума, входу генератора тактовых импульсов, четвертым входам оперативных запоминающих устройств, вторым входам первого, второго и третьего блоков связи с датчиком.На фиг.1 представлена структурная схема устройства; на фиг.2 - функциональная схема блока задания режима; на фиг,З - функциональная схема выбора максимума,Устройство (фиг.1) имеет датчик 1 измерения длины подъемного каната, выполненный в виде датчика положения привода подъема и соединенный через редуктор 2 свалом двигателя 3 привода подъема, датчик 4 измерения длины тягового каната, выполненный в виде датчика положения привода тяги и соединенный чере редуктор 5 с валом двигателя 6 привода тяги, и датчик 7 угла поворота платформы, выполненный в видедатчика положения привода поворота и соединенный через редуктор 8 с валом двигателя 9 привода поворота, Каждый привод имеет свой канал управления, каналы управления приводами подьема, тяги и поворотной платформы идентичны. Каждый канал включает в себяблок 10, 11 или 12 связи с датчиком, первый вход которого соединен с выходом соответствующега датчика 1, 4 длины каната или 7 угла поворота платформы, а выход через соответствующий коммутатор 13, 14, 15 соединен с двунаправленной шиной данных, связывающей блоки 16, 17 или 18 оперативного запоминающего устройства (ОЗУ) совходами соответствующих блоков 19, 20, 21 цифро-аналогового преобразования (ЦАП), выходы которых соединены с первыми входами соответствующих регуляторов положения 22, 23, 24. Второй вход каждого регулятора положения соединен с аналоговым выходом соответствующего блока 10, 11, 12 связи с датчиками.Выходы регуляторов положения соединены со вторыми входами соответствующих элементов 25, 26, 27 с регулируемым коэффициентом усиления, Параллельно каждомуиз элементов 25, 26, 27 включены соответствующие ключи 28, 29, 30. Выходы командоконтроллеров 31, 32, 33 соединены через соответствующие ключи 27, 29, 30 со входами преобразователей 34, 35, 36 питающихэлектродвигатели 3, 6, 9. Режимы работы устройства задаются спомощью блока 37 задания режимов, первый выход которого соединен с входами управления ключей 28, 29, 30, второй выход - с третьими входами блоков 16, 17, 18 ОЗУ,третий выход с четвертыми входами блоков 16, 17, 18 ОЗУ, вторыми входами коммутаторов 13, 14, 15 и вторыми входами блоков 10, 11, 12 связи с датчиками, а также и со входом запуска генератора 38 тактовых импульсов и входом управления блока 39выбора максимума, Первый, второй и третий информационные входы блока 39 выбора максимума соединены с аналоговыми выходами блоков 10, 11, 12 связи с датчиком. Первый., второй и третий выходы блок 39 выбора максимума соединены со вторыми входами соответствующих блоков 19, 20, 21 ЦАП и входами управления соответствующих ключей 40, 41, 42. Первые входы управления блоков 16, 17, 18 соединены с 2025 305055 выходом генератора 38 тактовых импульсов.Блок 37 задания режимов может состоять из трехпозиционного переключателя,первый вывод которого подключен к резистору 44, второй вывод к резистору 45 итретий вывод к резистору 46. Другие выводырезисторов подключены к плюсу источникапитания, а скользящий контакт переключателя к общей точке,Блоки 10, 11, 12 связи с датчиками предназначены для преобразования последовательности импульсов поступающих свыхода датчиков 1, 4, 7 в параллельный двоичный код и его аналоговый эквивалент.Преобразование осуществляется путемподсчета количества импульсов с помощьюсчетчиков накопителей. Второй вход каждого блока пердназначен для установки схемыблока в исходное состояние,Блоки 16, 17, 18 ОЗУ и редназначен ы длязаписи, хранения и чтения данных, Каждыйблок осуществляет обмен данными в пределах своего канала управления, через двунаправленную шину данных. Адрестребуемой ячейки ОЗУ формируется внутренней схемой блока-регистром адреса, путем подсчета количества импульсовпоступивших по первому, либо второму входу блока, Третий вход предназначен длясброса в исходное состояние регистра адреса блока. С помощью четвертого входа задается режим чтения информации из блокалибо записи,Блоки 19, 20, 21 ЦАП осуществляют прием параллельного двоичного кода и преобразование его в аналоговый эквивалент,либо хранение принятого ранее кода с одновременным преобразованием в аналоговыйэквивалент, Для выбора одного из этих режимов блоки имеют второй вход.Блок 39 выбооа максимума может состоять из компараторов 47 - 49. Инверсные входы компараторов 47 и 49 объединены иявляются первым входом блока, Прямойвход компаратора 47 соединен с инверснымвходом компаратора 48 и является третьимвходом блока, Первые входы компараторов48 и 49 обвединены и являются вторым входом блока, Выход компаратора 47 соединен через логический элемент 50 "И" спервым входом триггера 51, а через логический элемент 52 "И-НЕ" и логический элемент 53 "И" с третьим входом триггера 51.Выход компаратора 48 соединен с первымвходом триггера 51 через последовательносоединенные логический элемент 54 "И-Н Е"и логический элемент 50 "И", а через логический элемент 55 "И" - со вторым входом;триггера 51, Выход компаратора 49 соеди 1788163 1055 нен через логический элемент 55 "И" со вторым входом триггера 51, а через логический элемент 56 "И-НЕ", элемент 53 "И" - с третьим входом триггера 51. Выходы триггера 51 соединеныс первыми входами логических элементов, 57, 58, 58 "И", вторые входы которых подключены ко входу "С" триггера 51 и являются управляющими входами блока. Выходы логических элементов 57, 58, 59 являются выходами блока 39 выбора максимума.Блок 39 выбора максимума предназначен для нахождения наибольшего аналогового сигнала из трех имеющихся, запоминания входа по которому он пришел, и выдачи этой информации в момент появления сигнала логической единицы на входе управления блока,Принцип работы устройства заключается в следующем.Машинист экскаватора производит в режиме ручного управления перемещение ковша по желаемой траектории из точки загрузки в точку разгрузки, т,е. производит обучающий цикл, При этом устройство осуществляет запоминание через определенные интервалы времени точек траектории движения ковша по всем трем координатам, а затем по полученным параметрам траектории находит привод, у которого заданное перемещение для данного цикла обучения получилось наибольшим, Этот привод будет ведущим, т,е. приводом, от которого потребуется максимальное быстродействие, а два других привода подчиненными ему. При автоматическом воспроизведении заданной траектории, устройство замыкает по положению ковша всетри привода, причем ведущий привод работает в позиционном режиме, т,е. осуществляет перемещение рабочего органа механизма из одного фиксированного положения в другое, Характер траектории перемещения при этом важен лишь постольку, поскольку он обеспечивает минимальное время перемещения, а следовательно и максимальную производительность экскаватора. Два других привода работают в следящем режиме, задание на входе которых определяется координатами, заданными в режиме обучения, скоростью ведущего привода и сигналом обратной связи по положению. Устройство имеет три режима работы "Обучение", "Ручное управление", "Автоматическое управление". Задание режима работы осуществляется машинистом с помощью блока 37 задания режимов работы, при этом на соответствующем выходе блока появляется сигнал 5 10 15 20 25 30 35 40 45 50 логического нуля. На остальных выходахформируется сигнал логической единицы.Переход из режима "Обучение" в режим"Автоматическое управление" и обратноосуществляется через режим "Ручное управление".В режиме "Обучение" по сигналу логической единицы на первом выходе блока 37задания режимов замыкаются ключи 28, 29,30, что позволяет машинисту осуществлятьручное управление экскаватором независимо от работы устройства.Сигнал логической единицы со второговыхода разрешает работу регистра адресаблока 16, 17, 18 ОЗУ.Сигнал логического нуля с третьего выхода запускает генератор 38 тактовых импульсов, поступает на второй входкоммутаторов 13, 14, 15, в результате чегопервые выходы блоков 10, 11, 12 соединяются через коммутаторы с шиной данных блоков 16, 17, 18 ОЗУ, поступает на элементы47-49 блока 39 выбора максимума в результате чего на выходах этого блока в течениивсего режима "Обучение" устанавливаетсясигнал логического нуля,поСтупает на чет-вертый вход блоков 16, 17, 18 ОЗУ, что устанавливает режим записи информации в этиблоки, а также поступает на второй входблоков 10, 11, 12 связи с датчиками чемосуществляет установку внутренних схемблоков в исходное состояние,После того, как был задан режим "Обучение", машинист экскаватора перемещает ковш по желаемой траектории, управляя приводами с помощью командбконтроллеров 31, 32, 33 сигнал с выхода которых проходит через ключи 28, 29, 30 на вход преобразователей 34, 35, 36 привода подьема, тяги и поворота, При этом датчики 1, 4 длины подъемного и тягового канатов, датчик 7 угла поворота платформы связанные с соответствующими двигателями 3, 6, 9 через редукторы 2, 5, 8 осуществляют преобразование угла поворота вала редукторов в унитарный код, т.е. последовательность импульсов, число которых пропорционально углу поворота вала редуктора, а следовательно перемещению ковша экскаватора на протяжении всего пути, На выходе датчиков 1, 4, 7 вырабатывается последовательность импульсов поступающая на первый вход соответствующих блоков 10, 11, 12 связи с датчиками. В результате на первых выходах блока 10, 11, 12 связи с датчиками появляется параллельный двоичный код пропорциональный перемещению ковша, и его аналоговый эквивалент на вторых выходах блоков.С выхода блоков 10, 11, 12 параллельный двоичный код через коммутаторы 13, 14, 15 поступает на первые входы блоков 19, 20, 21 ЦАП и шину данных блоков 16, 17, 18 ОЗУ, По каждому имульсу, поступающему с выхода генератора 38 тактовых импульсов, в блоки 16, 17, 18 ОЗУ записывается информация о пройденном пути в ячейку памяти,адрес которой определяется количествомимпульсов поступивших с выхода генератора 38 тактовых импульсов с момента задания режима "Обучение",Сигналы, пропорциональные длинепройденного пути, со вторых выходов блоков 10, 11, 12 поступают на входы 1, 2, 3 блока 39 выбора максимума, Если на первом входе блока находится сигнал, имеющий наибольшее значение, то на выходе компараторов 47 и 49 будет логический нуль, навыходе элементов 52, 56 - логическая единица, на выходе ОЗ триггера 51 - единица. Если максимальный сигнал пришел на второй вход блока, то на выходе компараторов 48 и 49 будет логическая единица, котораячерез элемент 55 поступит на вход 02 триггера 51, Если максимальный сигнал пришел на третий вход блока, то на выходе компаратора 47 будет уровень логической единицы, а на выходе компаратора 48 логический нуль в результате на выходе элемента 50 будет логическая единица. С приходом сигнала логической единицы с выхода блока 37 задания режимов работы на управляющий вход блока 39 выбора максимума информация по переднему фронту записывается в триггер 51 и через элементы 57, 58, 59 поступает на выход.Таким образом блок 39 выбора максимума сравнивает текущие значения этихсигналов, находит наибольшее перемещение и в момент выхода из режима "Обучение" запоминает вход, по которому пришел сигнал этого перемещения,Состояние других блоков устройства для данного режима значения не имеет,По окончании режима "Обучение" машинист экскаватора с помощью блока 37 задания режимов, задает режим "Ручное управление", при этом сигнал логической единицы с третьего выхода блока 37 запрещает работу генератора 38 тактовых импульсов, поступает на четвертый вход блоков 16, 17, 18 ОЗУ, что соответствует режиму чтения информации из этих блоков, поступает на элементы 47 - 49 блока 39 выбора максимума в результате чего на выходе блока с номером 1,2 или 3, в зависимости от того по какому входу 1, 2 или 3 был максимальный сигнал с режиме "Обучение", появляется сигнал управления, который замыкает один 152025 303540 45 50 55 из ключей 40, 41 или 42, и поступает на второй вход одного из блоков 19, 20 или 21 ЦАП, что соответствует переводу этого блока из режима приема и преобразования параллельного двоичного кода в режим хранения и преобразования в аналоговый эквивалент кода, принятого последним в обучающем цикле, Выходной сигнал этого блока будет являться заданием на перемещение ведущему приводу.Сигнал логического нуля со второго выхода блока 37 задания режимов работы предустанавливает и удерживает в этом состоянии регистры адреса блоков 16, 17, 18, ОЗУ, на шине данных которых появляется двоичный код, соответствующий первой точке траектории записанной в обучающем цикле. В блоке 16 ОЗУ находятся координаты точек, заданной траектории движения для привода подъема, в блоке 17 - координаты для привода тяги, и в блоке 18 - для привода поворота.Сигнал логической единицы на первом выходе блока 37 остается без изменений.В режиме "Автоматическое управление" сигнал логического нуля с первого выхода блок 37 задания режимов размыкает ключи 28, 29, 30, что соответствует замыканию по положению всех трех приводов экскаватора,Сигнал логической единицы с третьего выхода блока 37 задания режимов остается без изменений.Сигнал логической единицы со второго выхода блок 37 разрешает работу регистра адреса блоков 16, 17, 18 ОЗУ, двоичный код на шине данных которых, с помощью двух из трех блоков 19, 20, 21 ЦАП преобразуется в свой аналоговый эквивалент и далее поступает на первый вход соответствующих регуляторов 22, 23, 24 положения в виде задания на перемещение, на второй вход которых приходит сигнал отрицательной обратной связи по положению с выходоа блоков 10, 11, 12 связи с датчиками, При этом на выходе одного из трех блоков 19, 20, 21 ЦАП присутствует сигнал соответствующий полному заданию на перемещение и который остается неизменным в течение всего режима "Автоматическое управление" до следующего обучающего цикла. Привод на вход регулятора положения которого приходит этот сигнал будет являться ведущим приводом,С выхода регуляторов положения 22,23, 24 сигнал, пропорциональный разнице между заданным и истинным значением положенияпоступает на второй вход элементов 25, 25, 27 и устанавливает их коэффициенты усиления. После установки командоконт10 роллеров 31, 32, 33 в рабочие положения двигателя начинают вращаться со скоростью,пропорциональной произведению сигнала задания с выхода командоконтроллеров на коэффициент усиления соответствующих элементов 25, 26, 27, Импульсы с выхода датчика 1, 4 или 7 ведущего привода через один из ключей 40, 41 или 42 поступают на второй вход блоков 16, 17, 18 ОЗУ, В результате с приходом каждого импульса содержимое регистра адреса блоков 16, 17, 18 ОЗУ увеличивается на единицу, начиная с нулевого, при этом на шине данных блоков 16, 17, 18 появляется двоичный код очередной точки записанной траектории. Таким образом сигнал задания на перемещение на входе следящих приводов изменяется со скоростью ведущего привода, а задание на перемещение ведущего привода остается неизменным, Это позволяет перемещать ковш по заданной траектории за время определяемое быстродействием ведущего привода.По окончании отработки заданной траектории все приводы останавливаются. После перехода в режим "Ручное управление", режим "Автоматическое управление" может быть задан повторно. Та, им образом применение данного устройства позволяет автоматически обеспечить перемещение ковша в транспортных операциях по траектории, заданной машинистом, что позволяет повысить производительность экскаватора за счет сокращения времени перемещения ковша по заданной траектории до минимально возможного, снизить утомляемость машиниста. Использование обучающего режима позволяет минимизировать время, необходимое на разработку и ввод программы управления движением ковша экскаватора, Результаты математического моделирования и экспериментов на экскаваторе свидетельствуют, что сокращение времени цикла составляет более 5. В качестве датчиков длины подъемного и тягового канатов, а также угла поворота могут использоваться фотоимпульсные датчики В Е 178 А, а в качестве ключей 28, 29, 30, 40, 41, 42 - герконовые реле, Элементы 47- 59 могут быть реализованы на микросхемах 155 серии. Блоки 10, 11, 12 связи с датчиками, коммутаторы 13, 14, 15, блоки 16, 17, 18 ОЗУ, блоки 19, 20, 21 ЦАП, элементы 25, 26, 27 с регулируемым коэффициентом усиления, генератор 38 тактовых импульсов, блок 39 выбора максимума могут быть реализованы как средствами микропроцессорной техники, так и на цифро-аналоговых элементах по известным схемам. 15 20 25 30 35 40 45 50 55 Формула изобретения Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна, включающая датчик длины тягового каната, командоаппарат электропривода тяги, соединенный с первым входом первого ключа, и командоаппарат электропривода поворота, соединенный с первым входом второго ключа, о т л и ч аю щ а я с я тем, что, с целью повышения производительности за счет автоматизации режима транспортировки ковша по требуемой траектории, она снабжена датчиком длины подъемного каната, датчиком угла поворота, третьим, четвертым, пятым и шестым ключами, тремя элементами с регулируемым коэффициентом усиления, тремя регуляторами положения, блоками режимов и выбора максимума, генератором тактовых импульсов, тремя оперативными запоминающими устройствами, тремя цифроаналоговыми и тремя блоками связи с датчиками, при этом выходы датчиков длины подъемного и тягового канатов и датчика угла поворота соединены с первыми входами третьего, четвертого и пятого ключей и соответственно первого, второго и третьего блоков связи с датчиком, первые выходы последних соединены с первыми входами одноименных коммутаторов, выход каждого коммутатора соединен с шиной данных одноименных оперативных запоминающих устройств и цифро-аналоговых преобразователей, выходы первого, второго и третьего цифроаналоговых преобразователей подключены к первым входам одноименных регуляторов положения, к вторым входам которых подключены вторые выходы соответствующих блоков связи с датчиком, выходы последних подключены также к первому, второму и третьему входам блока выбора максимума, первый, второй итретий выходы которого подключены соответственно к вторым входам третьего, четвертого и пятого ключей и входам первого, второго и третьего цифроаналоговых преобразователей, выход генератора тактовых импульсов подключен к первым входам первого, второго и третьего оперативных запоминающих устройств, к вторым входам которых подключены объединенные между собой выходы третьего, четвертого и пятого ключей, командоаппарат электропривода подъема подключен к первым входам шестого ключа и элемента с регулируемым коэффициентом усиления, командоаппараты электроприводов тяги и поворота подключены также к первым входам второго и третьего элементов с регулируемымкоэффициентом усиления, выходы первого, второго и третьего регуляторов положения подключены к вторым входам одноименных элементов с регулируемым коэффициентом усиления, при этом выход первого, второго и третьего элементов с регулируемым коэффициентом усиления объединены с выходами соответственно шестого, первого и второго ключей и подключены к соответствующим электроприводам подъема, тяги и поворота, первый выход блока задания режима подключен к вторым входам первого,второго и шестого ключей, второй выход блока задания режима подключен к вторым входам первого, второго и третьего коммутаторов и к третьим входам первого, второго 5 и третьего оперативных запоминающих устройств, а третий выход блока задания режима подключен к четвертому входу блока выбора максимума, входу генератора тактовых импульсов, четвертым входам опера тивных запоминающих устройств, вторымвходам первого, второго и третьего блоков связи с датчиком.1788163 Составитель С. КоваленкоРедактор С. Кулакова Техред М.Моргентал Коррек Па Заказ ВС) й Е о ч ( б С с оЯ Д о Тираж ПодписноеПИ Государственного комитета по изобретениям и открытиям при ГКНТ С 113035, Москва, Ж, Раушская наб., 4/5 изводственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина,
СмотретьЗаявка
4755265, 03.11.1989
ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "НОВОКРАМАТОРСКИЙ МАШИНОСТРОИТЕЛЬНЫЙ ЗАВОД", МОСКОВСКИЙ ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ, СЛАВЯНСКИЙ ГОСУДАРСТВЕННЫЙ ПЕДАГОГИЧЕСКИЙ ИНСТИТУТ
ОСТРИРОВ ВАДИМ НИКОЛАЕВИЧ, КОВАЛЕНКО СЕРГЕЙ НИКОЛАЕВИЧ, ПЕРЕПИЧАЕНКО ЕВГЕНИЙ КОНСТАНТИНОВИЧ, ОВСЯННИКОВ ВЛАДИМИР ПЕТРОВИЧ, ФЕДЧЕНКО НИКОЛАЙ ЕФИМОВИЧ
МПК / Метки
Метки: автоматизированного, ковша, перемещениями, транспортными, экскаватора-драглайна
Опубликовано: 15.01.1993
Код ссылки
<a href="https://patents.su/9-1788163-sistema-avtomatizirovannogo-upravleniya-transportnymi-peremeshheniyami-kovsha-ehkskavatora-draglajjna.html" target="_blank" rel="follow" title="База патентов СССР">Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна</a>
Устройство для исправления ошибок
Номер патента: 1120335
Опубликовано: 23.10.1984
МПК: G06F 11/18
Метки: исправления, ошибок
...третьей группы сумматоров по модулю два подключены к входам первого элемента ИЛИ, а второй выход блока фиксации первого отказа - к второму блокировочному входу блока фиксации второго отказа, входы первого элемента И-НГ подсоединены к нулевой шине.При этом блок фиксации первого (второго) отказа содержит первый элемент ИЛИ-НЕ, вторые элементы И-НЕ, третий и четвертый элементы И-НЕ, первый и второй элементы И, второй элемент ИЛИ, двоично-десятичные реверсивные счетчики, вход приема вектора синдрома блока подключен к первым входам вторых элементов И-НЕ, вход начальной установки - к первому входу второго элемента ИЛИ, вход сигнала сброса - к первому входу первого элемента И, вход второго строба, вход тактовых импульсов и первый...
Адантивное устройство для идентификации объекта управления

Номер патента: 1478190
Опубликовано: 07.05.1989
Авторы: Авдеев, Жданов, Карпов, Киселева
МПК: G05B 13/02, G05B 23/02
Метки: адантивное, идентификации, объекта
...а С выходов второго блока 11 аналого-цифрового преобразователя последовательность сигналов Ч, Я , Ч п 1Чп 1 поступает на входы первой 1 и второй 6 моделей объекта управления, на входы первого 3 и второго 8 блоков умножения и на блок 5 набора масштабных коэффициентов.Формирование оценок параметров объекта управления с помощью первой модели 1 объекта управления (в первом канале идентификации) осуществляется следующим образом.Выходные сигналы У, Я, У Я , ,Ъ п первой модели 1 объекта управления подаются на первые входы первого сумматора 2, на вторые входы которого подается последовательность сигналов У, п, У п 17 п 1 с выходов первого блока 10 аналого-цифровых преобразователей. Первый сумматор 2 вычисляет рассогласование выходных...
Устройство для обратного тригонометри-ческого преобразования

Номер патента: 849239
Опубликовано: 23.07.1981
Автор: Блюменау
МПК: G06G 7/22
Метки: обратного, преобразования, тригонометри-ческого
...уравновешивания:может быть выполнен, например, в видереверсивного счетчика, счетный входкоторого через элемент задержки связан с выходом блока 7 управляемыхзадержекБлок 9.компенсации может состоятьиз последовательно соединенных блокацифрового уравновешивания с ЦАП либоиз интегратора с ключом на входе.Арктангенсное и арккотангенсноепреобразования устройство осуществляет следующим образом.Опорный генератор 1 вырабатываетсинусоидальное напряжение 0 =Азив2 ВЬ тс периодом Т и амплитудой А, поступающее на первый вход сравнения дискриминаторов 2 и 3, а также прямоугольные импульсы, передний фронт которыхсоответствует нулевой Фазе синусоидального сигнала, поступающие на первый вход фазового детектора 4. Благодаря действию астатической системы...
Устройство измерения уровня радиопомех

Номер патента: 1370622
Опубликовано: 30.01.1988
Авторы: Вагин, Голубев, Левша, Тормышов
МПК: G01R 29/26
Метки: радиопомех, уровня
...триггера 17, последний переключается и сигнал логической единицы увеличивает показания счетчика 2 на едим"1370622 10 35 цу, уменьшает коэффициент передачи аттенюатора 14 на 3 дБ, через блок 3 разряжает интегратор 1 и запускает реле 4 времени, Цикл повторяется,Если уровень сигнала не превышает 60 дБ/мкВ, то он подается на пороговый блок 6.Известно, что интенсивность помехи интермодуляционной определяется следующим образом: им (я,) о д- с)в 0 гв :е е:егде 1 , ) - интенсивность интермог г(н ( )5дуляционной помехиц-порядка 1-го и з-гокаскадов соответственно,Кв ,К е - коэффициент передачи 20в,входного устройства иЬго каскада соответственно,Очевидно, что при изменении коэффициента передачи К в п раз интенсивность интермодуляционной...
Устройство для фильтрации сигналов
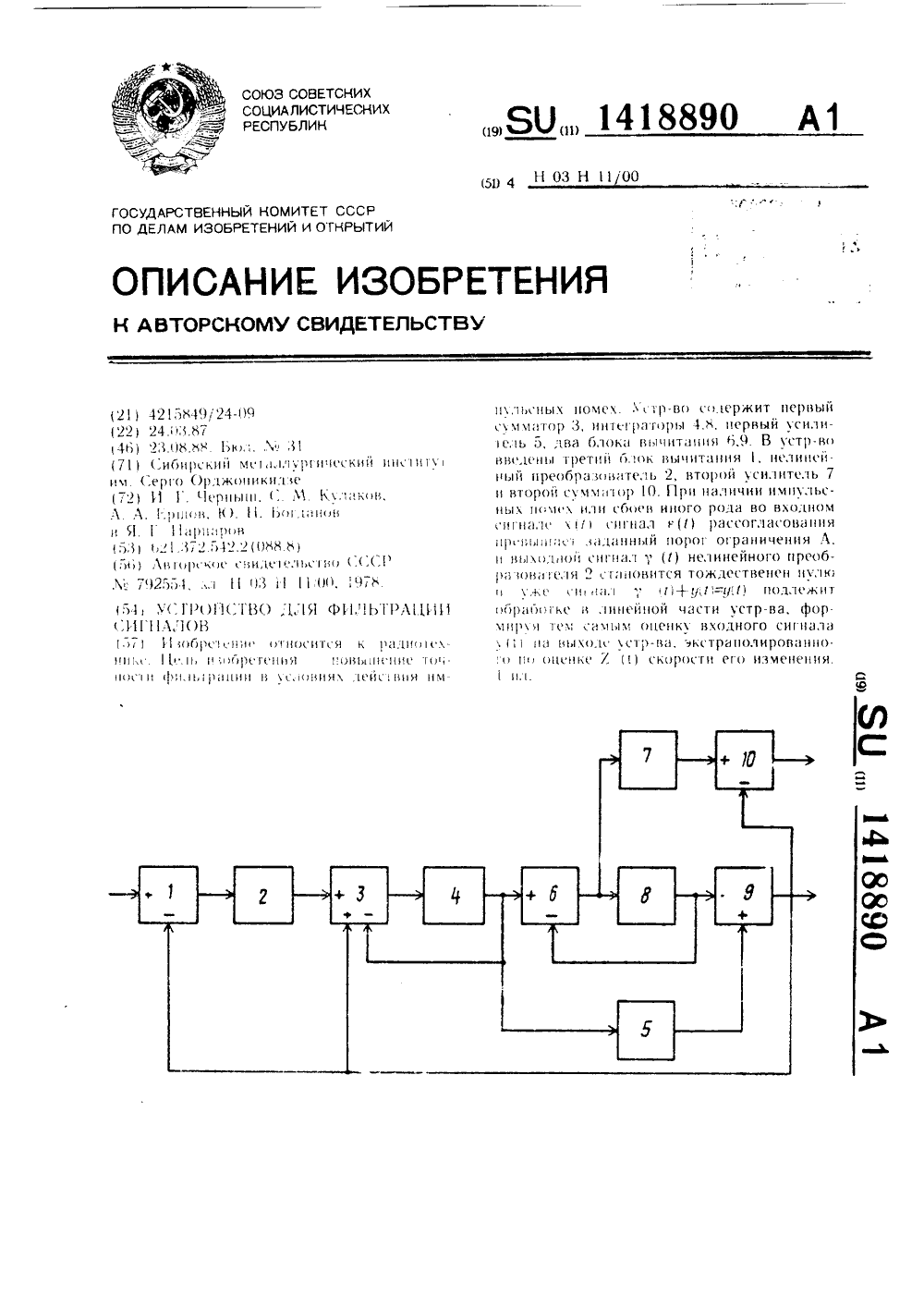
Номер патента: 1418890
Опубликовано: 23.08.1988
Авторы: Богданов, Ершов, Кулаков, Парпаров, Черныш
МПК: H03H 11/00
Метки: сигналов, фильтрации
...обработкс в линейной части устройства, формируя тем самым оценку входного сигнала у на выходе устройства, экстраполированного по оценке г(1) скорости его изменения.Кроме того, на выходе второго сумматора 10 получается значение прогноза сигнала у по оценке его скорости за 25врсмя ту( + т ) = у(1)+ Е(1) тпри условии, что коэффициент К второго усилителя принимает значениеК=т/Т1,хО.НО си Ни., (1) целинеиного преоб. Р 1 В; ГЕЛЯ " ПОСХ Пс)С Ца ПЕРВЫЙ СУММИ. рх кпии Вхол Горго сх)Хатора 3, на второй сх мчирукцций Вход которого подается сигнал у(1) с 1 х 0.1( Второгс олока 9. Полученный сигнГ, (1) +у ( ) подвергается обработке В,Ннс иц)й ч;кги устройства в составе перго 4 и ИТО)о О 8 интератоИв и перьи) и Вр(и 0 1) ГгккВ Вычитания, пере;с 1...
Предыдущий патент: Механизм натяжения гусеничной ленты экскаватора
Следующий патент: Датчик пути
Случайный патент: 199264