Устройство для программного управления с коррекцией программы
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1352457
Авторы: Кондратенко, Кронгауз, Миронец, Филаретов








Текст
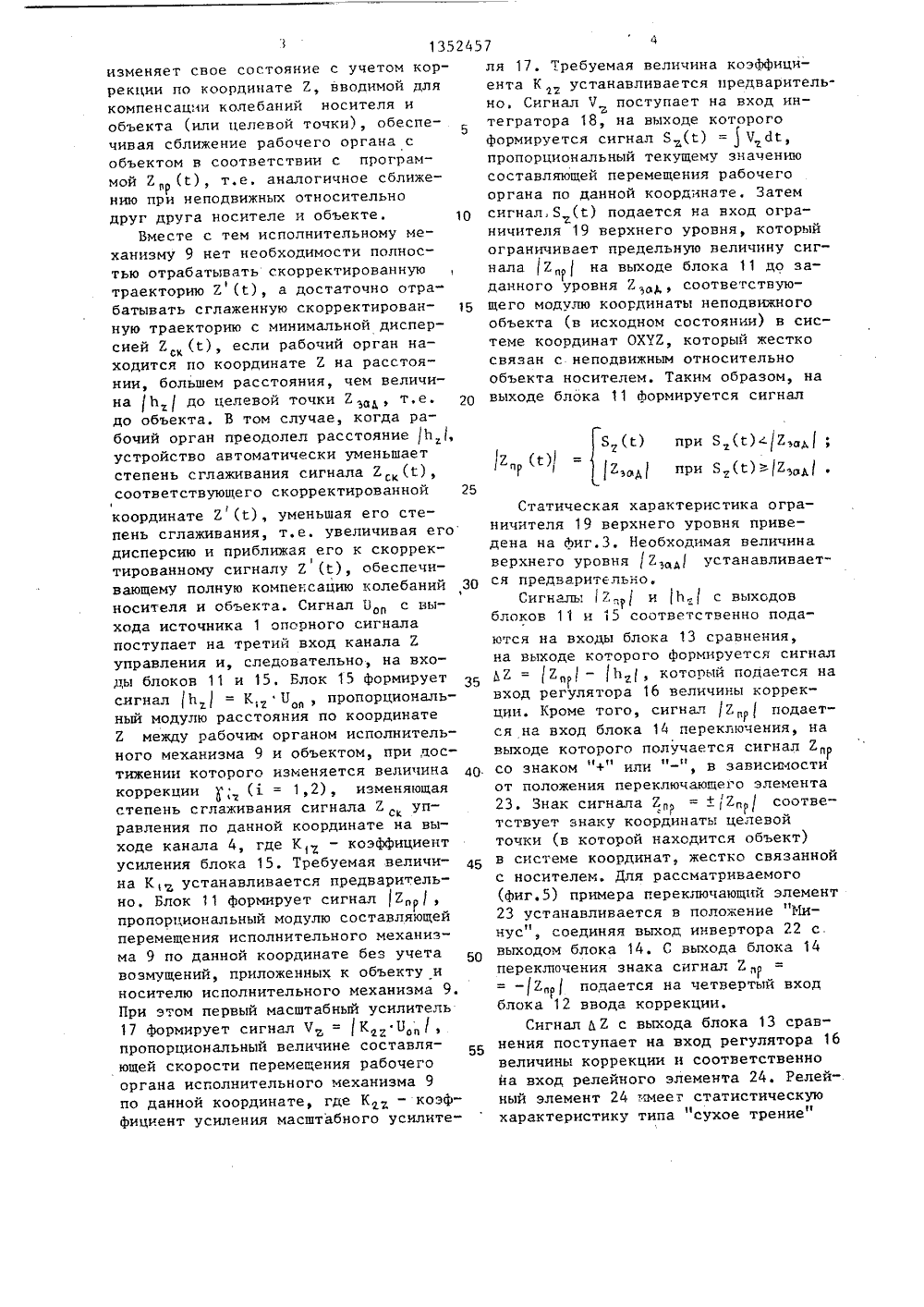
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 511 4 С 05 В 19/ ср 1 флрСАНИЕ ИЗОБРЕТЕНИЯ Д 1 цг гА и нал упра ения содержитмасштабный ани к з координ равнения регулят ввода к блок, чения рекции блок в довате блок с окели к ака ны ко рекци одерж сумм ла. 3 бловода причемт после 54) УСТРОЙСТВО ПРЛЕНИЯ С КОРРЕКЦИЕ57) Изобретениеике и вычислител ОГРАММНО ПРОГРАММЬ РАВоррекции оединеннь но ор и. п. ф-ль осится к авто лаживания ои технике, в л УДАРСТВЕННЫЙ КОМИТЕТ СССРДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ н Автоаском свидвтвльст(71) Дальневосточный политехнический институт им. В,В.Куйбышева и Николаевский кораблестроительный институт им. адм. С.О.Макарова(56) Авторское свидетельство СССР У 617207, кл. В 23 К 11/24, 1978.Архангельский А.Е. и др. Модели.рование на аналоговых вычислительных машинах, Л.: Энергия, 1972,с. 33Авторское свидетельство СССР В 813473, кл. С 06 С 7/52, 1979.Авторское свидетельство СССР В 1229728, кл. С 05 В 19/00, 1984.Авторское свидетельство СССР В 451059, кл. С 05 В 19/16, .1972. частности к системам программного управления манипуляторами. Целью изобретения является расширение функциональных возможностей путем управления по трем координатам при относительных перемещениях объекта управления и носителя исполнительного механизма и коррекции программы с учетом этих перемещений, Устройство содержит источник опорного сигнала, три канала управления по каждой ксрдинате, датчики перемещения объекта и датчики перемещения носителя по каждой координате, многОканальный блок управления приводами, блок приводов, исполнительный механизм с рабочим органом и датчики обратной свя- Ж457 1 1352Изобретение относится к автоматике и вычислительной технике, в частности к системам программного управления манипуляторами.5Целью изобретения является расширение функциональных возможностей путем управления по трем координатам при относительных перемещениях объекта управления и носителя исполнитель ного механизма. На фиг,1 изображена функциональная схема устройства программного управления с коррекцией программы; на фиг.2 - схема блока сглаживания сигнала; на фиг.3 - статистическая характеристика ограничителя верхнего уровня; на фиг.4 - статистическаясхарактеристика релейного элемента; на фиг,5 - положение объекта и носи 20 теля исполнительного механизма ( а при отсутствии возмущений; о - при наличии возмущений); на фиг.6 - кривые изменения выходных сигналов раз 25 личных блоков устройства при его работе.Устройство программного управления с коррекцией программы содержит источник 1 опорного сигнала, три канЪла 2-4 управления по координатам, датчики 5 перемещения объекта и датчики 6 перемещения носителя исполнительного механизма по каждой координате, многоканальный блок 7 управления приводамиблок 8 приводов, ис полнительный механизм 9 с рабочим органом, датчики 10 обратной связи. Каждый канал управления содержит блок 11 задания координат, блок 12 ввода коррекции, блок 13 сравнения, 40 блок 14 переключения знака, масштабный блок 15 и регулятор 16 величины коррекции.Блок 11 задания координат содержит первый масштабный усилитель 17, ин тегратор 18 и ограничитель 19 верхнего уровня.Блок 12 ввода коррекции содержит сумматор 20 и блок 21 сглаживания сигнала. Блок 14 переключения знака 50 содержит инвертор 22 и переключающий элемент 23. Регулятор 16 величины коррекции содержит релейный элемент 24, блок 25 выделения модуля и второй масштабный усилитель 26, Блок 21 сглаживания сигнала содержит блок 27 вычитания, блок 28 вычитания абсолютной величины, блок 29 умножения, интегратор 30, сумматор 31. Устройство программного управленияс коррекцией программы работает следующим образом.Управление исполнительным механизмом 9 с рабочим органом осуществляется по трем каналам 2-4 управления Х,У, 2 (т.е, по трем координатам). Рассмотрим работу устройства на примереканала 4 по координате 2, так как построение всех каналов управления идентично,Рабочий орган исполнительного механизма 9 должен отработать по координате 2 заданный программной сигнал2 (С) и остановится в целевой точке(точке, в которой может находитьсяобъект) с координатами (Хад од 12 д) в системе координат ОХУ 2, жестко связанной с носителем исполнительного механизма 9, т.е, для данногоканала управления отработать сигнал2 эдд, В тех случаях, когда объект иноситель исполнительного механизма 9являются подвижными и совершают в общем случае случайные колебания покаждой из координат или по любой изних, например по 2, то перемещениерабочего органа по траектории 2(.)не приводит к цели, т,е. отработаннаярабочим органом координата 2 С, несоответствует координате 2 д целевойточки. Носитель, на котором установ"лен исполнительный механизм 9, иобъект, координаты которого долженобработать рабочий орган, как правило, совершают колебания под действиемприложенных к ним возмущений. Такимобразом, программная траектория2изменения координаты 2 выбирается для случая, когда возмущенияотсутствуют, т,е. когда носитель иобъект неподвижны относительно другдруга. Придействии возмущений, когданоситель и объект совершают случайныеколебания по всем координатам, а длярассматриваемого канала 4 управленияпо координате 2, устройство осуществляет коррекцию программы движения2в подвижной системе координатОХУ 2, связанной с носителем, обеспечивая компенсацию возмущений, приложенных к носителю и объекту, а соответственно, и сближение рабочегооргана с объектом в условиях возму"щений по программе 2, следовательно, и отработку координаты целевой точки 2 с,д . Таким образом исполнительный механизм 9 непрерывноизменяет свое состояние с учетом коррекции по координате 2, вводимой для компенсации колебаний носителя и объекта (или целевой точки), обеспечивая сближение рабочего органа с объектом в соответствии с программой Е (С), т.е, аналогичное сближению прй неподвижных относительно друг друга носителе и объекте,Вместе с тем исполнительному механизму 9 нет необходимости полнос 10 тью отрабатывать скорректированнуютраекторию 2 (С), а достаточно отрабатывать сглаженную скорректированную траекторию с минимальной дисперсией 2 , если рабочий орган находится по координате 2 на расстоянии, большем расстояния, чем величина (Ь( до целевой точки 2 од, т,е.до объекта. В том случае, когда ра15 20 бочий орган преодолел расстояние (Ь,/,устройство автоматически уменьшаетстепень сглаживания сигнала 2 (Т),соответствующего скорректированнойкоординате 2 , уменьшая его сте 25 пень сглаживания, т,е. увеличивая его носителю исполнительного механизма 9. При этом первый масштабный усилитель 17 формирует сигнал 17 = ( К По(, пропорциональный величине составляющей скорости перемещения рабочего органа исполнительного механизма 9 55 по данной координате, где К - коэффициент усиления масштабного усилитедисперсию и приближая его к скорректированному сигналу 2 , обеспечивающему полную компенсацию колебаний 30 носителя и объекта. Сигнал Н с выхода источника 1 опорного сигнала поступает на третий вход канала Е управления и, следовательно, на входы блоков 11 и 15, Блок 15 формирует сигнал (Ь ( - К, П , пропорциональ ный модулю расстояния по координате Е между рабочим органом исполнительного механизма 9 и объектом, при достижении которого изменяется величина 40. коррекции ; ( = 1,2), изменяющая степень сглаживания сигнала Еуправления по данной координате на выходе канала 4, где К 1 - коэффициент усиления блока 15. Требуемая величи на К, устанавливается предварительно. Блок 11 формирует сигнал (2/, пропорциональный модулю составляющей перемещения исполнительного механизма 9 по данной координате без учета возмущений, приложенных к объекту иля 17. Требуемая величина коэффици- ента К , устанавливается предварительно. Сигнал Ч поступает на вход интегратора 18, на выходе которого формируется сигнал Я(Т) =Ч ЙГ, пропорциональный текущему значению составляющей перемещения рабочего органа по данной координате. Затем сигнал,8 (с) подается на вход ограничителя 19 верхнего уровня, который ограничивает предельную величину сигнала (2 ) на выходе блока 11 до заданного уровня Е д, соответствующего модулю координаты неподвижного объекта (в исходном состоянии) в системе координат ОХОТЕ, который жестко связан с неподвижным относительно объекта носителем. Таким образом, на выходе блока 11 формируется сигналЯпри 8 (1) (Езад ( (, / = ( Ерд ) при Я(Т) - (Есюд /Статическая характеристика ограничителя 19 верхнего уровня приведена на фиг.3. Необходимая величина верхнего уровняЕдд/ устанавливается предварительно,Сигналь, /2 / и (Ь,/ с выходов блоков 11 и 15 соответственно подаются на входы блока 13 сравнения, на выходе которого формируется сигнал ЬЕ = (2/ - (Ь/, который подается на вход регулятора 16 величины коррекции. Кроме того, сигнал /2 / подается на вход блока 14 переключения, на выходе которого получается сигнал 2, со знаком + или -и, в зависимости от положения переключающего элемента 23, Знак сигнала Е= +/Еп( соответствует знаку координаты целевой точки (в которой находится объект) в системе координат, жестко связанной с носителем. Для рассматриваемого (фиг.5) примера переключающий элемент 23 устанавливается в положение "Минус", соединяя выход инвертора 22 с, выходом блока 14. С выхода блока 14 переключения знака сигнал Е, = -(2,( подается на четвертый вход блока 12 ввода коррекции.Сигнал ЬЕ с выхода блока 13 сравнения поступает на вход регулятора 1 б величины коррекции и соответственно на вход релейного элемента 24, Релейный элемент 24 имеег статистическую характеристику типа "сухое трение"13524 (фиг.4), В зависимости от того, с каким знаком ( - или "+) поступает на вход релейного элемента 24 сигнал Ъ 2, на выходе формируется сигнал с соответствующим знаком и амплитудои: Ь 26 0; Ь 2) О,О), если0-0 если2Сигнал с выхода релейного элемента 24 подается на вход блока 25 выделения модуля, на выходе которого формируется сигнал / П /, который пода ется на вход второго масштабного уси лителя 26, на выходе которого форми- РУетсЯ сигнал /;,г = К /П/, влиЯЮ- щий на степень сглаживания сигнала управления ио данной координате, где К г - коэффициент усиления второго 20 масштабного усилителя 26. Величины уровней О, и -0 на выходе релейного элемента 24 и величина Кз устанавливаются предварительно.С выхода регулятора 16 величины коррекции сигнал у подается на третий вход блока 12 ввода коррекции. При этом если )12 с О, то , =К) /П) / и обеспечивается сглаживание с минималгной дисперсией, а если Л 2О, то= К) /-1/ и степень сглаживания уменьшается увеличивая при этом дисперсию. Блок 12 ввода коррекции предназначен для Формирования скорректированного сигнала 2 управле- В ния по заданной координате с учетом программно заданной текущей координаты 2 (Т), составляющих колебаний объекта 2, и носителя 7, а также с учетом текущего значения сигна лаСигнал 7. и 7. с датчиков 5 и 6, пропорциональные составляющим колебаний объекта и носителя исполнительного мехацизгла 9 по координате 2 соответственно подаются на первый и второй входы блока 12 ввода коррекции.Таким образом, на прямые входы сумматора 20 подаются сигналы 2 и 2 а на инвертирующий вход - сигнал 2 . На выходе сумматора 20 формирун) ется скорректированный сигнал 2 =21 + 2 О, соответствующий желаемому изменению координаты рабочего органа исполнительного механизма 9, обеспечивающему полную компенсацию колебаний объекта и носителя исполнительного механизма 9 при одновре 576менцом сближении рабочего органа с объектом.Глок 21 сглаживания сигнала предназначен для сглаживания сигнала 2,Исходя из соображений получения наиболее экономичной траектории движения рабочего органа, нецелесообразно на всей траектории движения полностью компенсировать колебания объекта и носителя. Поэтому при перемещении исполнительного механизма 9 до некоторого, заранее определенного расстояниямежду объектом и рабочим органом,обеспечивающего безаварийную работуисполнительного механизма 9, имеетместо более высокая степень сглаживания сигнала 2 . При достижении этогорасстояния изменяется сигнал "становится равным, и соответственно уменьшается степень сглаживания сигнала 2 , т.е. происходит более полная компенсация колебанийобъекта и носителя.На блок 21 сглаживания сигнала(сигнальный вход), т.е. на вход сумматора 27, подается сигнал 2 (г,), науправляющий вход блока 21, т.е. навход блока 29 умножения, подаетсясигнал ;, который перемножается ссигналами, поданными на остальныевхбды блока умножения, а на выходе блока 21 Формируется сигнал 2 к(Г)соответствующий сглаженному блоком 21сигналу 2,Формируемые таким образом в каждомканале управления скорректированныесигналыподаются на входы блока 7, который преобразует командные сигналы (Х , ), , 2,), соответствующие текущей точке траектории движения рабочего органа, а управляющие сигналы г), - й) для соответствующих приводов каждой степени подвижности исполнительного механизма 9, Таким образом управляющие сигналъг к, - Ы (где п - число приводов, соответствующее числу сте 1352457пеней подвижности исполнительногомеханизма 9) поступают на входы блока 8 прив одов, который, отрабатываяих, перемещает звенья исполнительного 5механизма 9, обеспечивая движениерабочего органа по траектории К,(Е)== СХК), У,(С), 2,К)1,Датчики 10 предназначены для формирования сигнала обратной связи сле дящих приводов всех степеней подвижности исполнительного механизма 9.Схема конкретного блока 7 зависитот вида исполнительного механизма,числа степеней подвижности и типа 15привода. Так, если исполнительныймеханизм обладает тремя степенямиподвижности и работает в прямоугольной системе координат, то каждый канал блока 7 и соответствующий канал 20блока 8 приводов представляет собойобычный следящий привод, выходнойсигнал которого (перемещение по соответствующей координате рабочегооргана исполнительного механизма 9) 25должен воспроизводить входной сигнал,поступающий с выхода соответствующего канала управления 2-4 устройства.Если же в качестве исполнительногомеханизма 9 выбран манипулятор, работающий в цилиндрической, сферической или комбинированной системекоординат, то построение блоков 7, 8и датчика 10 и их взаимосвязь с исполнительным механизмом 9 может быть35осуществлена по аналогии с известнымустройством. При этом тип рабочегооргана зависит от назначения устройства. В общем случае это должен бытьлибо захват, либо рабочий инструмент,управляющая команда на который поступает в момент, когда рабочий органбудет перемещен в целевую точку с координатами (Х , Ух, 2 О,), терабочий орган должен при этом либозахватить объект, либо осуществитьнад ним определенную технологическуюоперацию,В качестве примера исполнительного механизма возьмем манипулятор50(спуско-подъемное устройство манипуляционного типа), установленный наподвижном носителе, например на судне, Объектом может быть любой предмет, находящийся на поверхности воды или на палубе другого судна. Устройство управления обеспечивает сближение рабочего органа (например, схвата) исполнительного механизма 9 с объектом при решении задачи захвата объекта в условиях морского волнения различной балльности, При этом случайные колебания объекта и колебания носителя (судна) с установленным на нем манипулятором в условиях развивающегося и затухающего волнения носят не- стационарный характер, Благодаря непрерывному введению коррекции программы, т.е. формированию сигнала управления по соответствующей координате, компенсирующего влияние составляющих перемещения объекта и носителя по данной координате, рабочий орган исполнительного механизма 9 будет осуществлять сближение с объектом захватывания с теми же параметрами, т.е. так же, как и при отсутствии волнения, Для рассматриваемого примера предварительной установкси коэффициентов Кгх,кч и Кг 2 определяется величина скорости изменения каждой программной координаты:1 к lкгхПо( х 1 = (Кг По(( Кг 2 ПООПредварительная установка коэффициентов к, к 1, к 2 влияет на выбор параметров:11 хКх По 1 (сс 1К Цохосс 2 К 2 11 пгде ц )О,которые выбираются исходя из соображений исключения ситуации случайного столкновения рабочего органа собъектом при высокой степени сглажисвания скорректированных сигналов,т.е. прих 3 Х х 11 х 2 2 сПредварительная установка коэффициентов Кх, Кз и К 2 влияет на величину параметров у, (д = 1,2;= Х, У, Е), так каквлияющих на степень сглаживания, Если, например, стоит задача захватить объект, находящийся на поверхности моря, то элемент 23 канала управления9 13524 по координате 2 необходимо перевести в положение "Минус .На фиг.5 показаны различные положения носителя, объекта и исполни 5 тельного механизма 9 для иллюстрации работы устройства при формировании сигнала 2, г.), На фиг.5 пунктиром показаны положения объекта, носителя и исполнительного механизма в исходном состоянии, т,е. при отсутствии волнения, а сплошной линией - их состояния в один из моментов времени, когда имеет место и вертикальная качка судна, и вертикальные колебания объекта, причем исполнительный механизм 9 показан в двух положениях: 1 - при отключенном устройстве программного управления; 2 - при коррекции программной координаты 2 с учетом сигналов 2и 2, поступающих с соответствующих датчиков 5 и 6.На фиг,б приведены кривые изменения сигналов 2 п2 (й) и 2 ск , иллюстрирующие работу устройства про граммного управления с коррекцией программы и блока сглаживания сигнала 21, где обозначены: 2 п- программная траектория изменения координаты 2; 2(й) - кривая колебаний объекта," 7.(с) - кривая колебаний носителя исполнительного механизма 9;2 (С) - скорректированная координата, 1обеспечивающая пс 1 лную компенсацию колебаний объекта и нссителяф 2 ск 1:) слаженная скорректированная координата сигнал на выходе блока 21); , - времяо1 Переключающий элемент 23 может 40быть выполнен в виде двухпозиционного переключателя. В первой позицииЬоложение "Минус") выход блока 14подключается и выходу инвертора 22,а ВО втОрой пОзиции (положение 45"Плюс" ) выход блока 14 подключаетсяк вхоцу инвертора 22,Таким образом, введение в устройство датчиков перемещения объекта иперемещения носителя исполнительногомеханизма, а также предложенная структура блоков и каждом канале и структура самого канала управления обеспечивают функционирование устройствапри относительных перемещениях объекта и носителя исполнительного мехавизма по всем трем координатам и позволяет вносить коррекцию програм мы с учеом этих перемещений. 1 О57Формула изобретения1. Устройство программного управления с коррекцией программы, содержащее источник опорного сигнала, два канала управления по координатам, каждый из которых содержит блок задания координаты, блок ввода коррекции, блок сравнения, блок переключения знака, масштабный блок, регулятор величины коррекции, рабочий орган, связанный с исполнительным механизмом, а также многоканальный блок управления приводами, первый и второй входы которого подключены к выходам соответствующих каналов управления пс координатам, а выходы многоканального блока управления приводами подключены к соответствующим входам блока приводов, выходы которого связаны с соответствующими звеньями исполнительного механизма, о т л и ч а ю щ е е с я тем, что, с целью расширения функциональных возможностей путем управления по трем координатам при относительных перемещениях объекта управления и носителя исполнительного механизма и коррекции программы с учетом этих перемещений, блок ввода коррекции содержит блок сглаживания сигнала и сумматор, первый прямой вход и инвертируемый вход которого являются первым и вторым входами блока ввода коррек-, ции, третьим и четвертым входами которого являются управляющий вход блока сглаживания сигнала и второй прямой вход сумматора соответственно, сигнальный вход блока сглаживания сигнала соединен с выходом сумматора, а выход является выходом блока ввода коррекции, а также в устройство введен третий канал управления по координате, датчики перемещения объекта и датчики перемещения носителя исполнительного механизма па каждой координате, выходы которых подключены к первому и второму входам соответствующего канала управления, причем выход источника опорного сигнала псдключен к третьим входам каналовуправления, первый и второй входы каждого из которых связаны соответственно с первым и вторым входами блока ввода коррекции, а третий вход канала управления - с входами блока задания координат и масштабного блока, выходы которых подключены к1 З 5 соответствующим входам блока сравнения, выход блока сравнения через регулятор величиы коррекции подключен к третьему входу блока ввода коррекции, четвертый вход которого через блок переключения знака соединен с выходом блока задания координат, каждое звено исполнительного механизма через датчик обратной связи подключено к соответствующему входу обратной связи многоканального. блока управления приводами, вьход каждого блока ввода коррекции является выходом соответствующего канала управления, а выход третьего канала управления по координате подключен к третьему входу многоканального блока управления приводами,2. Устройство по п.1, о т л и - ч а ю щ е е с я тем, что каждый блок задания координат содержит последовательно соединенные первый масщтабный усилитель, интегратор и ограничитель верхнего уровня, вход масштабиогоусилителя является вхочом блока, авыход ограничителя верхнего уровняявляется выходом блока.3. Устройство по п.1, о т л и ч аю щ е е с я тем, что регулятор величинь коррекции содержит последовательно соединенные реленьп элемент,блок выделения модуля и второй масштабный усилитель, выход которогс является выходом регулятора величиныкоррекции, входом которого являетсявход релейного элемента,154, Устроиства по п.1, о т л и -ч а ю щ е е с я тем, что каждьп блок переключения знака содержит инвертор и переключающий элемент, входы которого подключены соответственно к входу и вьходу инвертора, выход переключающего элемента является выходом блока переключения знака, вход которого подключен к входу инвертора.,актор М.Циткин Тираж 863Государственного комитета СССРделам изобретений и открытийосква, Ж, Раушская наб., д, 4 Заказ 5565/4 дписно ИИПИ 113035,иэводственно-полиграфическое предприятие, . Ужгород, ул ктная,
СмотретьЗаявка
4088860, 10.07.1986
ДАЛЬНЕВОСТОЧНЫЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. В. КУЙБЫШЕВА, НИКОЛАЕВСКИЙ КОРАБЛЕСТРОИТЕЛЬНЫЙ ИНСТИТУТ ИМ. АДМ. С. О. МАКАРОВА
КОНДРАТЕНКО ЮРИЙ ПАНТЕЛЕЕВИЧ, ФИЛАРЕТОВ ВЛАДИМИР ФЕДОРОВИЧ, КРОНГАУЗ ЮЛИАН МАРАТОВИЧ, МИРОНЕЦ ГАЛИНА ВЛАДИМИРОВНА
МПК / Метки
МПК: G05B 19/16
Метки: коррекцией, программного, программы
Опубликовано: 15.11.1987
Код ссылки
<a href="https://patents.su/9-1352457-ustrojjstvo-dlya-programmnogo-upravleniya-s-korrekciejj-programmy.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления с коррекцией программы</a>
Логический блок для управления исполнительным механизмом

Номер патента: 960733
Опубликовано: 23.09.1982
Авторы: Калиниченко, Конотоп
МПК: G05B 19/04, H02P 7/20
Метки: блок, исполнительным, логический, механизмом
...триггер 9, входные выводы10 " 13 сигналов запуска команд,входные выводы 14 - 17 для подключения датчиков путевого и моментногоограничения, входной вывод 18 сигна ла сброса, выходные выводы 19-20команд управления каналов, выходнойвывод 21 цепи сигнализации.Логический блок управления работает следующим образом.Вентили 1 и 2 осуществляЮт операцию совпадения входных сигналов низкого уровня. Чаличие входных и выходных сигналов на каждом выводесоответствует высокому уровню напряжения. Для появления сигнала на выводе 19 необходимо подать напряжение на любой вывод 10 или 11. Присрабатывании датчика путевого илимоментного ограничения на одном извыводов 14 и 15 появится сигнал,по которому формирователь 5 сигналазапрета вырабатывает на...
Логический блок для управления исполнительным механизмом

Номер патента: 1283714
Опубликовано: 15.01.1987
Авторы: Калиниченко, Конотоп
МПК: G05B 19/04, H02H 7/20
Метки: блок, исполнительным, логический, механизмом
...30 и 31, выбираютупреждение конечного положения датчика, подсоединенного к входу 14, иустанавливают требуемые выдержки вблоках 18 и 2 задержки.Для появления команды на выходе8 необходимо подать сигнал высокогоуровня на вход 4 или 5. При срабатывании любого датчика ограничения,подключенного к входам 6 и 7, команда на выходе 8 исчезнет. Если длительность команды превысит выдержку времени блока 18 задержки, то опрокинется КЯ-триггер 17, которыйзапретит команду, при этом появится сигнал на выходе 21. Возвраттриггера осуществляется сигналом,поданным на вход 20. Для появления команды на выходе 16 необходимо подать сигнал высокого уровня на вход 12 или 13, при этом должна исключаться внешней схемой подача сигналов высокого уровня на входы...
Телевизионное устройство для формирования сигнала изображения объекта

Номер патента: 1700764
Опубликовано: 23.12.1991
Авторы: Горячева, Гусаров, Нощенко, Ресин
МПК: H04N 5/232
Метки: изображения, объекта, сигнала, телевизионное, формирования
...к выходам соответствующих разрядов счетчика 82 импульсов, вход которого соединен с входом импульсов повышенной строчной частоты, а вход сброса - с входами установки регистров бб - 70, триггеров 77 - 81 и входом импульсов кадровой частоты. При этом входы установки триггеров 77-81 через диоды 83-86 присоединены к выходам счетчика 82.Телевизионное устройство работает следующим образом.Посредством наведения автоматически кли по командам с Земли совмещают наперед заданный участок" поля зрения с наблюдаемым астрономическим объектом планета, звезда, туманность к т,н). Объективом 3 через светофильтр 4 проецируют на люминесцентное покрытие 2 изображение наблюдаемого объекта. Одним кэ светоФильтров 4, устанавливаемых последовательно на оск...
Селектор телевизионного сигнала подвижных объектов

Номер патента: 944152
Опубликовано: 15.07.1982
Авторы: Голушко, Кулешов, Хромов, Цыцулин
МПК: H04N 5/14
Метки: объектов, подвижных, селектор, сигнала, телевизионного
...Исходный видеосигнал текущего кадра ОВх(п),где и номер кадра, форма сигнала показанана фиг. 2 а (Тк время кадра), по р ступает на входы делителя 1, сумматора 2 и блока 3, форма напряжения на выходе сумматора 2, являющегося выходным напряжением селектора ОВЫ(п) показана на фиг. 2 б. Исходный видеосигнал и сигнал с выхода сумматора 235 после деления делителями 1 и 4 подаются на сумматор 5, форма сигнала на выходе которого Г(п) показана на фиг. 26. С выхода сумматора 5 видео 40 сигнал подается на блок 9 и на сумматор 10. Выходной сигнал сумматора 10 задерживается на кадр в блоке 6, форма напряжения на выходе которого Г(п) показана на фиг. 21. Этот сиг 45 нал инвертируется элементом НЕ 7 и подается на другой вход сумматора 2. При...
Станционный блок аппарат распорядительно-исполнительного типа

Номер патента: 36463
Опубликовано: 31.05.1934
Автор: Наталевич
МПК: B61L 21/02
Метки: аппарат, блок, распорядительно-исполнительного, станционный, типа
...быть нажата, а, следовательно, не может быть произведена подача отправления и, наоборот, при заблокированном блок. механизме отправления ключ-жезл ие может быть вынут из замка. При таком способе включения замка подача отправления после выхода на перегон поезда с подталкивающим паровозом может быть произведена лишь после того, как толкач вернулся обратно на станцию и ключ вставлен в замок.Таким образом, отрицательной стороной существующего устройства, предупреждающего выпуск поездов на перегон, занятый толкачом, является замедление подачи отправления, невыгодное с точки зрения пропускной способности, особенно в случаях большого расстояния, проходимого толкачом, так как имеют место случаи, когда из-за опоздания подачи отправления...
Предыдущий патент: Рецепторный датчик положения обучаемой системы управления
Следующий патент: Устройство для программного управления станком
Случайный патент: Карусельный агрегат для сушки окрашенных