Система управления грузовыми операциями на танкере
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки








Текст
ОП ИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскихСоциалистическихРеспублик пп 919933(61) Дополнительное к авт, свид-ву Р 753709 (22) Заявлено. 231079 (21) 2830944/27-11,1 И М. Кп.з с присоединением заявки МЗ В 63 В 27/24 Государственный комитет СССР по делам изобретений и открытий(088,8) Опубликовано 1504,82, Бюллетень Мо 14 Дата опубликования описания 15.04,82Г.К.Соколовр В,Е,Вольский; В.Н.Юнг, А.В.Ермолаев-Маковский, В.М.Старостин, .ВСории,(72) Авторы изобретения Ю,Н.Власов, А.А.Щеголев и Ю.Т.Никитюк 1 . 71) Заявител(54) СИСТЕМА УПРАВЛЕНИЯ ГРУЗОВЫМИ ОПЕРАЦИЯМИНА ТАНКЕРЕ 2 я к автомати вых систем н 9 753709 Изобретение относитсзации специальныхгрузо атанкерах,По основному авт.св.известна система управления грузовыми операциями на танкере, содержа- .щая датчик уровня и датчики режимовоборотов насосов, связанные черезустройство ввода и вывода информациис формирователем состояния объектов,датчики посадки танкера, связанныес формирователем критических параметров, к одним из выводов которогоподключены блоки контроля посадки ипрочности, сигнальные табло, исполнительные механизмы насосов, блоккоммутации управляющих команд и блокопроса, состоящий из регистров параметров по приоритету, матричныхячеек управления ими, матричныхячеек формирования управляющих команд, при этом входы блока опросасоединены с одним из выходов форми"рователей состояния объекта и критических параметров, а выход с однимиз входов блока коммутации управляющих команд, другие входя которогосоединены соответственно с выходамиустройства ввода и вывода информации и формирователя состояния объекта, а выходы с исполнительными механизмами насосов, затворов, блоком имитации грузовых программи сигнальными табло. Матричные ячейки управления регистрами параметров по приоритету выполнены наэлементах И, ИЛИ, Задержка, И-НЕ, блок коммутации управляющих команд состоит из переключателя и логических элементов И, ИЛИ, НЕ, Задержкаф, а блок имитации грузовых программ включает в себя временной датчик имитаторы датчиков и элемент И 1).Недостатком известной системы. является то, что она обеспечивает оператора информацией по прочности, посадке и остойчивости судна только при достижении текущим значением параметра граничного значения, После полученйя этой информации оператору необходимо по выработанной системой рекомендации произвести управляющее воздействие. После срабатывания исполнительного механизма начинается процесс ликвидации выбега параметра эа допустимое граничное значение.,За это время параметр может значительно превзойти допустимое значение. В момент проведениягрузовых операций такой заброс параметра, особенно прочности или остойчивости, за допустимую границу отрицательно влияет на техничес кое состояние судна и может привести к аварийной ситуации. В момент расчета плана проведения грузовых операцийв случае достижения параметром граничного значения оператору необходимо начинать расчет снова.Отсутствие возможности оперативной корректировки плана грузовых программ до момента выбега параметраувеличивает и время режима Проверка.Целью изобретения является повышение быстродействия системы.Цель достигается тем, что система снабжена блоком прогнозирования параметров судна при погрузке, состоящим из ячейки синхронизации и подключенных к ее выходу одними .1 своими входами триггеров, одни идругие выходы которых подключены соответственно через ячейку предварения и непосредственно к одному извходов блоков формирования критических параметров, а другие вхОды одного и другого триггеров соответственно подключены к датчикам посадкинепосредственно и через элемент ИЛИк датчикам уровня и имитатору датчиков.На фиг.1 представлена функциональная схема всей системы управления; на фиг.2 - функциональная схема блока опроса; на фиг.З - функциональная схема блоков коммутации управляющих команд, имитации грузовыхпрограмм и прогнозирования параметров судна соответственно,Система (фиг.1) включает в себяформирователь 1 состояния объектов,ко входам которого подключены датчики 2 уровня и датчики 3 режимовработы насосов через устройство. 4ввода и вывода информации, причем,цругой выход устройства 4 подключенк одному из входов блока 5 коммутации управляющих команд, к другимвходам которого подключены соответствующие выходы формирователя 1 непосредственно и через блок б опроса, К другому выходу блока б опросаподключен выход формирователя 7 критических параметров, входы которого через блок 8 прогнозирования параметров судна при погрузке соединеныс датчиком 2 уровня, датчиками 9посадки танкера и.блоками 10 и 11контроля, соответственно посадкии прочности судна. Выходы блока 5подключены к исполнительным механизмам 12 л 13 затворов и насосов, сигнальным табло 14 - 16. На табло 14 высвечивается факт ликвидации выбега критических параметров, на табло 15 - информация о неисправности в65 Блок 17 имитации датчиков (фиг.З)состоит из имитаторов датчиков 34 линии управления, на табло 16 - рекомендация к действию оператора.Блок 17 имитации датчиков своими выходами связан с входами формирователя 1 состояния объектов и блоком 8прогнозировайия параметров судна.Вход блока 17 имитации датчиковсвязан с выходом блока 5 коммутацииуправляющих команд. Блок 6 опроса(Фиг.2) состоит из матричных ячеек 18 О управления регистрами 19 параметровпрочности, крена, дифферента, осадки, генеральной линии и матричныхячеек 20 формирования управляюцихкоманд. Связь матричных ячеек 20 5 Формирования управляющих команд срегистрами 19 параметров организована таким образом, что в первую очередь опрашиваются емкости, которыевозможно подключить к процессу, азатем емкости; которые можно отключить от процесса. Матричные ячейки 18управления регистрами 19 переметровпо приоритету содержат логическуюцепочку, состоящую из элемента И 21,соединенного через элемент "Задержка" 22 с одним из, входов элементаИЛИ 23. Выход элемента ИЛИ 23 черезэлемент 24 И-НЕ, второй вход которого связан с выходом ячейки 18 управления регистром высшего приоритета,соединен с инверсным входом элемента 24 И-НЕ ячейки 18 управления регистром параметра низшего приоритетаи своим регистром 19. Матричные ячейки 20 формирования управляющих команд содержат элементы 25 И-НЕ, Выходы элементов И-НЕ 25, формирующихкоманды через элементы 26 ИЛИ напуск и остановку исполнительных механизмов .12 и 13, соединены перекрест-.40 но и с инверсными входами ячеек 20,которые работают с регистром параметра низшего приоритета. Входы элементов 25 И-НЕ соединены также с выходами Формирователя 1 состояния объек-.45 тов.Елок 5 коммутации команд фиг.З)состоит из переключателя 27, логических элементов 28 и 29 И, 30 НЕ,31 "Задержка", 32 и 33 ИЛИ. Выходыпереключателя 27 в режиме "Лвтоматическое управление" .соединены сисполнительными механизмами, а через элемент 32 ИЛИ с одним из входов элемента 28 И, соединенного своимвыходом через элемент 31 "Задержка"с сигнальным табло 15. Другой входэлемента 28 И соединен с выходомэлемента 30 НЕ, вход которого соединен с одним из входов элемента 29И, выход которого подключен к табло 14. Выходы переключателя 27 в режимах "Проверка" и "Совет" соединены через элемент 33 ИЛИ с табло 16.временных задатчиков 35 и элементов 36 И. Входы имитаторов 34 связаны с выходом переключателя 27 в режиме "Проверка" и выходами временных задатчиков 35, а первый выход имитаторов датчиков подключен к входу формирователя 1 состояния объектов через элемент 36 И, второй вход. которого связан с выходом переключателя 27 в режиме "Проверка". Вто-рой выход имитаторов датчиков 34 подключен к блоку 8 прогнозирования параметров судна. Блок 8 прогнозирования параметров судна при погрузке (фиг.3) состоит из ячейки 37 предварения, триггера 38, ячейки 39. синхронизации и элемента 40 ИЛИ. Входы ячейки 37 предварения подключены через триггер 38 к датчикам 9 посадки танкера, а через триггер 38 и элемент 40 ИЛИ к датчикам 2 уровня и имитаторам датчиков 34. Выходы триггеров 38 и ячейки 37 предварения подключены соответственно к формиррвателю 7 критических параметров. Выход ячейки 39.синхронизации подключен к триггерам 38.Устройство работает следующим образом.С устройства 4 для каждого конкретного случая погрузки - выгрузки в формирователь 1 состояния объектов вводятся конечные значения про" цесса грузовых операций по уровням. По посадке танкера вводятся конечные значения в формирователь 7 критических параметров. После введения плана грузовых программ и в зависимости от намеченной скорости проведения грузовых операций оператор на. блоке 17 устанавливает режим работы каждого имитатора датчика 34 при помощи временных задатчиков 35, т.е:. устанавливается время заполнения или осушения каждой емкости. Переключатель 27 устанавливается в положение "Проверка", и система включается. Начинается процесспроверки введения плана проведения грузовых операций. В соответствии с ко-, нечными и текущими параметрами регистр 19 параметров генеральной линии осуществляет выбор необходимой матричной ячейки 20. Выходные сигналы с матричных ячеек 20 через .эдементы ИЛИ 26 поступают на блок 5 коммутации управляющих команд, где через переключатель 27 приходят на вход имитаторов 34 датчиков и на вход элемента 36 И. Управляющие команды, таким образом, в режиме "Проверка" включают и выключают имитаторы датчиков 34 емкостей, на входе которых установлены объекты управления. После включения имитатора 34 на его выходе появляются два сигнала, Первый идет на второй вход элемента 36 И, с выхода которого сигнал поступает на вход Формирователя 1 состояния объектов для полученияинформации о выполнении управляющейкомандой своей функции. Второй сигнал с имитатора датчика 34 поступает на вход элемента 40 ИЛИ блока 8прогнозирования параметров суднапри погрузке. С выхода элемента 40ИЛИ этот сигнал идет на вход триггера 38, с которого, циклически, взависимости от работы ячейки 39 синхронизации может направляться навход формирователя 7 критическихпараметров или через ячейку 37 предварения, или непосредственно для выработки предварительной и текущейинформации о ходе протекания процес 15 са "Проверка".В ячейке 37 предварения производится последовательно преобразование аналоговых сигналов в цифровые,запоминание, вычисление скорости и20 ускорения изменения параметров. Такая обработка параметров позволяетосуществить прогнозирование изменения их во времени, получить на выходе ячейки 37 спрогнозированныезначения параметров, т.е. перейтик динамической оценке изменения параметров. Скорость и ускорение изменения параметров определяются.поточечным отборам текущих значенийпараметров через время Д, Ь. Скоростьопределяется по формулеЬ Х)=Х) -ХИ-)Ускорение определяется по формуле6 Х(п) =Х(и) -2 Х) +Х(Я,Прогноэируемое значение Х) тогдаравно:Хд) = ДХ(п)+ 3 Хп)+Х(в) кгде Х -точечный отбор оттекущегозначения параметра в еди 40 ницу времени.Так как параметры прочнОсти иостойчивости получаются расчетнымпутем на базе входных сигналов датчиков уровня 2, очень важно отбор4 точечных значений от всех датчиков2 и 9 осуществлять синхронно в одно и тоже время, для чего выходячейки 39 синхронизации подключенк входам триггеров 38. Обработанныев формирователях 1 и.7 сигналы поступают на блок 6 опроса для формирования последующих управляющих команд намеченной генеральной линиипроведения грузовых операций.В случае достижения граничногозначения параметра сигналом, поступившим на формирователь 7 критических параметров с выхода ячейки 37предварения, начинает гореть мигающим светом лампа этого параметрана блоке 10 или 11 посадки и прочности танкера, извещая оператора овозможном выбеге параметра за допустимое значение, Одновременноэтот сигнал с выхода формирователя 765 критических параметров поступает наот входы матричных ячеек 18 управления регистрами 19 параметров по приоритету. Регистр 19 осуществляет подключение матричной ячейки 20 форми-. рования управляющих команд, сигналс которой идет на вход блока 5 коммутации управляющих команд через элементы 26 ИЛИ и перекрестно на запрещающие входы элементов 25 И-НЕматричных ячеек 20 формирования управляющих команд, подключенных к регистрам 19 параметров низшего приоритета. В блоке 5 сигнал через переключатель 27, элемент 33 ИЛИ идет на табло сигнализации 16 "Рекомендация к действию".Имея информацию о возможном выбеге параметра на мигающем табло блока 10 или 11 и рекомендацию по его устранению на табло 16, оператор производит корректировку намеченной программы грузовых операций до момента выбега параметра,не прерывая и не останавливая процесса"Проверка", Если в продолжение процесса выбега параметра не произойдет, то введенный в систему. планпроведения грузовых операций с учетом произведенной корректировки по предварительной информации о возможном выбеге параметра принимается к реализации. Переключатель 27 выбора режима работы переводится в полоЖение "Автоматическое управление" или "Совет".Для выработки информации о ходе протекания процесса и о возможном выбеге параметра выходные сигналы датчиков 2 уровня, датчиков 3 режимов работы насосов и исполнительныхмеханизмов 12 затворов начинают поступать на Формирователь 1 состояния,объектов, а сигналы датчиков 2уровня и датчиков 9 посадки танке- .ра на Формирователь 7 критическихпараметров через блок 8 прогнозирования параметров судна при погрузке,чтобы максимально повысить быстродействие системы и исключить тем самым влияние на процесс проведения грузовых операций внешних возмущающих воздействий.На устройство 4 ввода и вывода информации сигналыдатчиков поступают для дистанционного контроля.В зависимости от заданных конечных значений параметров процесса и начального состояния исполнительных механизмов 12 затворов и 13 насосов,обработанные в Формирователе 1 состояния объектов сигналы поступаютв блок опроса 6, где начинаетсяпроцесс выработки управляющих команд, аналогичный режиму "Проверка".Сформированные в блоке б.опроса команды поступают на переключатель 27блока 5 коммутации управляющих команд. В режиме "Автоматическое управление" команды с переключателя 5 10 15 20 25 30 35 40 45 50 60 65 27 поступают на исполнительные механизмы 12 и 13. В режиме "Совет"команды с переключателя. 27 поступают через элементы 33 ИЛИ на табло 16"Рекомендация к действию". Сигналы датчиков 2 уровня и 9 посадки танкера поступают на входы триггеров38 и далее, циклически, в зависимости от работы ячейки 39 синхронизации . идут на Формирователь 7 критических параметров непосредственно или через ячейку 37 предварения. Вслучае поступления сигнала на входформирователя 7 через ячейку 37 вырабатываетая информация о возможном выбеге параметра за допустимоезначение, которая как и в режиме"Проверка" идет на засветку таблоблоков 10 или 11 мигающим светом ина засветку табло 16 "Ревомендацияк действию". Это позволяет оператору заранее подготовить и принятьмеры к недопущению выбега или, вкрайнем случае, избежать значительного заброса. параметра за допустимое граничное значение. Для выработки информации о выбеге параметра за допустимое значение сигнал наформирователь 7 критических параметров поступает непосредственно совторых выходов триггеров 38. Если текущее значение какого-либо параметра все-таки превзойдет допустимоезначение, информация с формирователя 7 критических параметров поступит насоответствующее табло блоков 10 или 11, которое загоритсяровным светом, и на входы матричныхячеек 18 блока опроса 6. В матричной ячейке 18 управления регистром19 параметров по приоритету критический параметр поступает на входэлемента 23 ИЛИ через элемент 24И=НЕ, одновременно на запрещающий вход элемента 24 И-НЕ матричной ячейки 18 параметра низшего приоритетаи на включение своего регистра 19параметра для выработки управляющей команды с целью ликвидации выбега критического параметра. Регистр 19 осуществляет подключениетой матричной ячейки 20 формирования управляющих команд, на которуюне поступают запрещающие сигналы отматричной ячейки 18, подключенной к регистру 19 параметра высшего приоритета и имеются разрешающие сигналы формирователя 1 состояния объектов. После выбоРа емкости, которую необходимо подключить к процессу, и открытия затвора 12 сигнал поступает на вход формирователя 1 состояния объектов. Обработанный в Формырователе 1 сигнал поступает на вход элемента 29 И для включения табло 14"Ликвидация выбега критического параметра 1. В случае Формирования управляющей команды для ликвидациивыбега параметра путем отключенияемкости от процесса грузовых операций после выдержки времени на элементе 22 сигналы о наличии выбега, параметра с формирователя 7 и об отключении емкости с формирователя 1 состояния объектов поступают через элемент 21 И на вход элемента 23 ИЛИ и далее, для выбора следующей рекомендации.Таким образом, оператор одновременно получает информацию о выбеге критического параметра, о пути его устранения и о том, что начался процесс ликвидации выбега параметра. В случае неисправности в линиях контроля и управления загорается табло 15 путем включения логической 15 цепочки, состоящей из элементов 31 фЗадержка", 28 И, 30 НЕ и 32 ИЛИ.Положительный эффект от введения блока прогнозирования параметров судна при погрузке, позволяющего 33 оценить динамику изменения параметров, заключается в том, что повышается быстродействие системы, которое приводит к сокращению време- ни расчета плана проведения процес са грузовых операций, так как становится возможной своевременная кор-. ректировка плана, которая,не допускает достижения параметрами граничных значений.ЗОВо время реализации плана грузовых операций наличие вновь введенного блока также позволяет сократить время грузовых операций. Анализ изменения параметров в динамике, позволяющий избежать забросов параметров эа допустимые границы, повьааает безопасность эксплуатации танкера, так как исключаются циклические перегрузки его корпуса, которые в конечном итоге могут привести к разлому судна и нанести большой ущерб в связи с разливом нефти. Формула изобретенияСистема управления грузовыми операциями на танкере по авт.св.Р 753709, о т л и ч а ю щ а я с я . тем, что, с целью повьыения быстродействия, она снабжена блоком прогнозирования параметровдудна при погрузке, состоящим иэ ячейки синхронизации и подключенных к ее выходу одними своими входами двух триг.- геров, одни и другие выходы которых подключены соответственно через ячейку предварения и непосредственно к одному из входов .блоков формирования критических параметров, а другие входы одного и другого триггеров соответственно подключены к датчикам посадки непосредственно и через элемент ИЛИ - к датчикам уровня и имитатору датчиков.Источники, информации, принятые во внимание при экспертизе1. Авторское свидетельство СССР 9 753709, кл. В 63 В 27/24,03.04.78 (прототип)./17 Тираж 463ВНИИПИ Государственнопо делам изобретен 113035, Москва, Ж, Ра Подписноемитета СССРоткрытийя наб., д. 4/5
СмотретьЗаявка
2830944, 23.10.1979
ПРЕДПРИЯТИЕ ПЯ Г-4372
СОКОЛОВ ГЕОРГИЙ КОНСТАНТИНОВИЧ, ВОЛЬСКИЙ ВИТАЛИЙ ЕВГЕНЬЕВИЧ, ЮНГ ВИКТОР НИКОЛАЕВИЧ, ЕРМОЛАЕВ-МАКОВСКИЙ АЛЕКСАНДР ВЛАДИМИРОВИЧ, СТАРОСТИН ВИКТОР МИХАЙЛОВИЧ, СОРИН ИЛЬЯ БОРИСОВИЧ, ВЛАСОВ ЮРИЙ НИКОЛАЕВИЧ, ЩЕГОЛЕВ АНАТОЛИЙ АНДРЕЕВИЧ, НИКИТЮК ЮРИЙ ТИТОВИЧ
МПК / Метки
МПК: B63B 27/24
Метки: грузовыми, операциями, танкере
Опубликовано: 15.04.1982
Код ссылки
<a href="https://patents.su/8-919933-sistema-upravleniya-gruzovymi-operaciyami-na-tankere.html" target="_blank" rel="follow" title="База патентов СССР">Система управления грузовыми операциями на танкере</a>
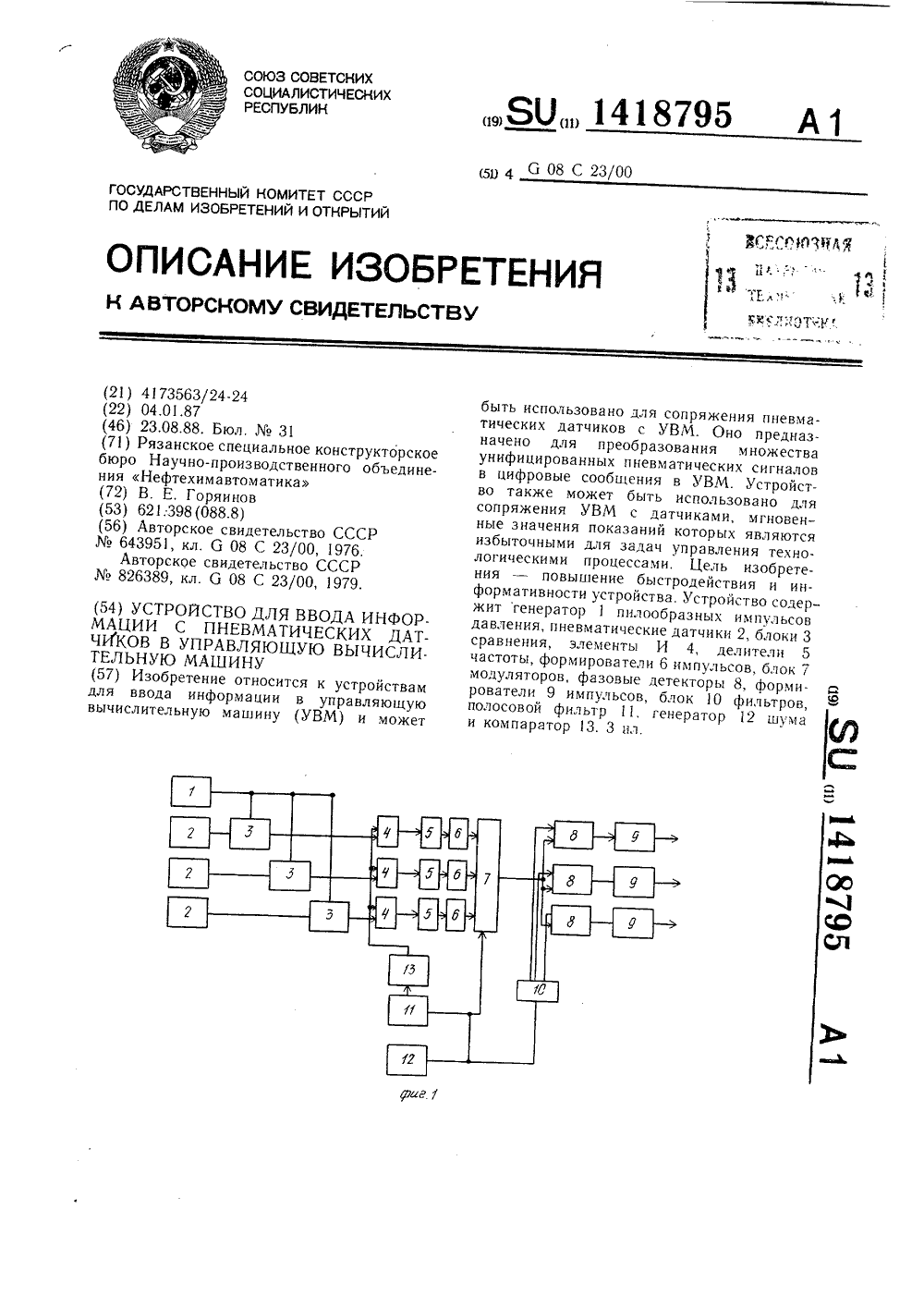
Устройство для ввода информации с пневматических датчиков в управляющую вычислительную машину
Номер патента: 1418795
Опубликовано: 23.08.1988
Автор: Горяинов
МПК: G06D 7/00
Метки: ввода, вычислительную, датчиков, информации, машину, пневматических, управляющую
...высокий логический уровень (логическая единица), который прикладывается к первым входам соответствующих элементов И 4 (фиг, 2). Последние при этом пропускают на входы делителей частоты импульсы с выхода компаратора 13. Импульсы накапливаются в делителях и при достижении заданного числа М производится запуск формирователей 6. Импульсы Ы (1) с выхода формирователей 6 поступают на блок 7, где осуществляется модуляция соответствующих узкополосных колебаний Ь (1), центральные частоты которых определяются параметрами колебательных контуров, сигналами Ы, (1) (фиг, 3). Колебания поступают в канал связи, где смешиваются с его шумами. Иа приемном конце сигналы поступают на входы фазовых детекторов 8 (фиг. 2), на другие входы которых...
Система управления грузовыми операциями на танкере

Номер патента: 596498
Опубликовано: 05.03.1978
Авторы: Володин, Калинин, Никитюк, Попов, Соколов, Сорин, Юнг
МПК: B63B 27/24
Метки: грузовыми, операциями, танкере
...следу(ощим образоч.С устройства 4 для каждого конкретного случая погрузки-выгрузки в формировзтсль 1 состояния объектов вводятся конечные значения процесса грузовых операций по уровням. По посадке танкера вводятся конечные значения в формирователь 7 критических параметров. После выбора режима работы переключателем 25, устройство включа(тся.Выходные сигналы датчиков 2 уровня датчиков 3 режимов работы насосов и исполнительных механизмов 11 затворов поступают на формирователь 1 состояния объектов, а сигналы датчиков 8 посадки танкера ца формирователь 7 критических параметров для выработки информации о ходе протекания процесса в режиме автоматического управления, и на устройство 4 ввода и вывода информации для Листан пион)гого...
Преобразователь параметров резистивных датчиков в частоту

Номер патента: 692082
Опубликовано: 15.10.1979
Авторы: Мартяшин, Николаев, Свистунов, Чернецов, Шляндин
МПК: H03K 13/20
Метки: датчиков, параметров, резистивных, частоту
...преобразователя, а управляющийвход переключателя соединен с блоком задержки, введены блок сравнения и два интегратора,причем один из входов блока сравнения соединен с выходом усилителя постоянного тока, адругой вход блока сравнения соединен с выхо.дом первого интегратора, вход которого соединен с выходом блока сравнения, с другим вхо 25дом переключателя и со входом блока задержки,.выход переключателя соединен со входомвторого интегратора, выход которого соединенс другим выходом блока связи.На чертеже приведена функциональная элект.30рическая схема преобразователя,Преобразователь содержит усилитель 1 постоянного тока, на вход которого включен ре.зистивный датчик 2 через блок 3 связи, нредставляющий собой, например, обобщенную схему...
Система управления грузовыми операциями на танкере

Номер патента: 753709
Опубликовано: 07.08.1980
Авторы: Вольский, Ермолаев-Маковский, Куклан, Соколов, Сорин, Сыромятников
МПК: B63B 27/00
Метки: грузовыми, операциями, танкере
...плана грузовых программ и в,зависимости от на меченной скорости проведения грузовых операций, оператор на блоке 16 устанавливает режим работы имитатора 33 каждого датчика при помощи временного задатчика 34, т.е. устанавливается 15 время заполнения или осушения каждой емкости. Переключатель 26 устанавливается в положение "Проверка" и система включается, Начинается процесс проверки введенного плана проведения грузовых операций. В соответствии с конечными и текущими параметрами регистр 18 параметров генеральной линии осуществляет выбор необходимой матричной ячейки 19.Выходные сигналы с матричных ячеек 25 19 через элементы ИЛИ, 25 поступают на блок 5 коммутации управляющих команд, где через переключатель 26 поступают на вход...
Устройство для обнаружения заданного уровня контролируемого параметра

Номер патента: 1372349
Опубликовано: 07.02.1988
Авторы: Ивановская, Канов, Михнов, Сергеев
МПК: G08B 23/00
Метки: заданного, контролируемого, обнаружения, параметра, уровня
...35 40 Получив в момент времени Т разрешение на работу, блок 4 реверсивного счета и индикации времени работает следующим образом. На прямом 45 входе элемента ЗАПРЕТ 21 появляется сигнал разрешения индикации. Тот же сигнал разрешает работу блоку 13 задания интервалов, который из тактовой частоты генератора 2 формирует последовательность коротких импульсов с заданным временем следования Т =с . Эти импульсы устанавли 1 к вают триггер 20 в момент времени й, таким образом, что его выходной сиг- . нал разрешает прохождение импульсов55 с генератора 12 импульсов через элемент И 14 на суммирующий счетчик 15 и запрещает прохождение сигнала разрешения индикации через элементЗАПРЕТ 21, а также разрешает прохождение импульсов на вычитающийсчетчик...
Предыдущий патент: Устройство для задраивания откидной крышки люка
Следующий патент: Устройство для подводной очистки корпусов судов
Случайный патент: Полимерминеральный раствор