Манипулятор модульного типа
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1252162
Авторы: Гутман, Узоровский



Текст
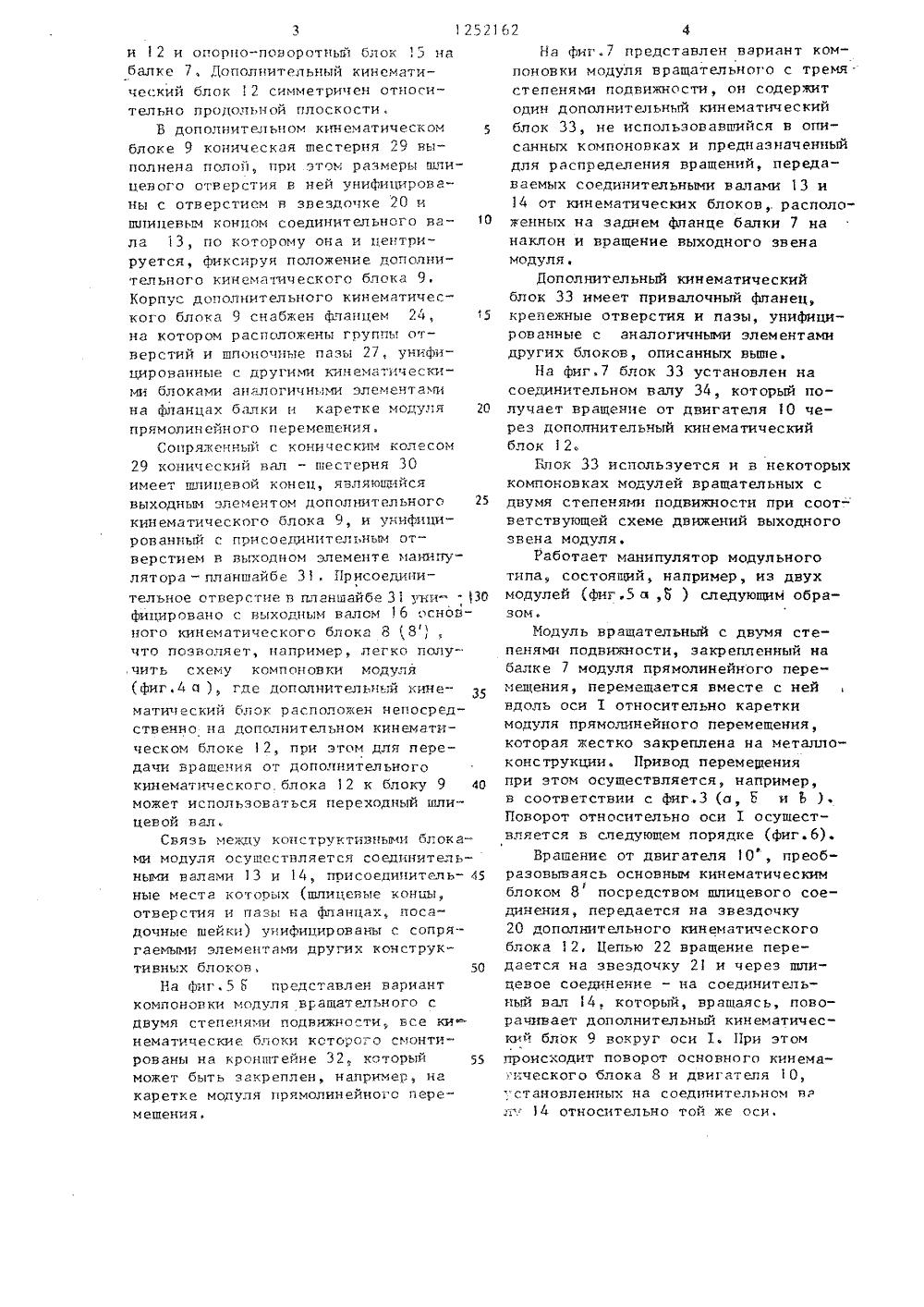
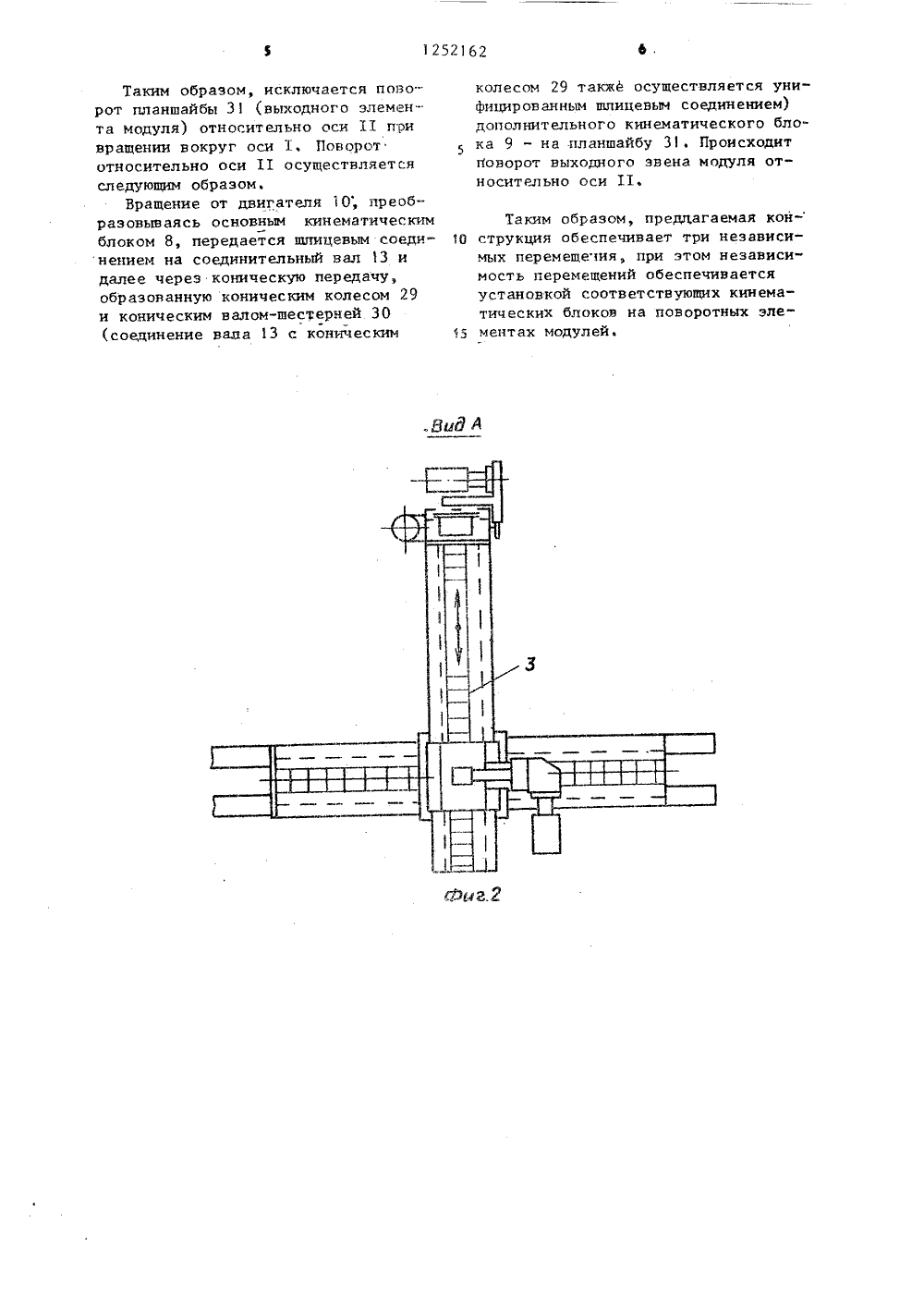
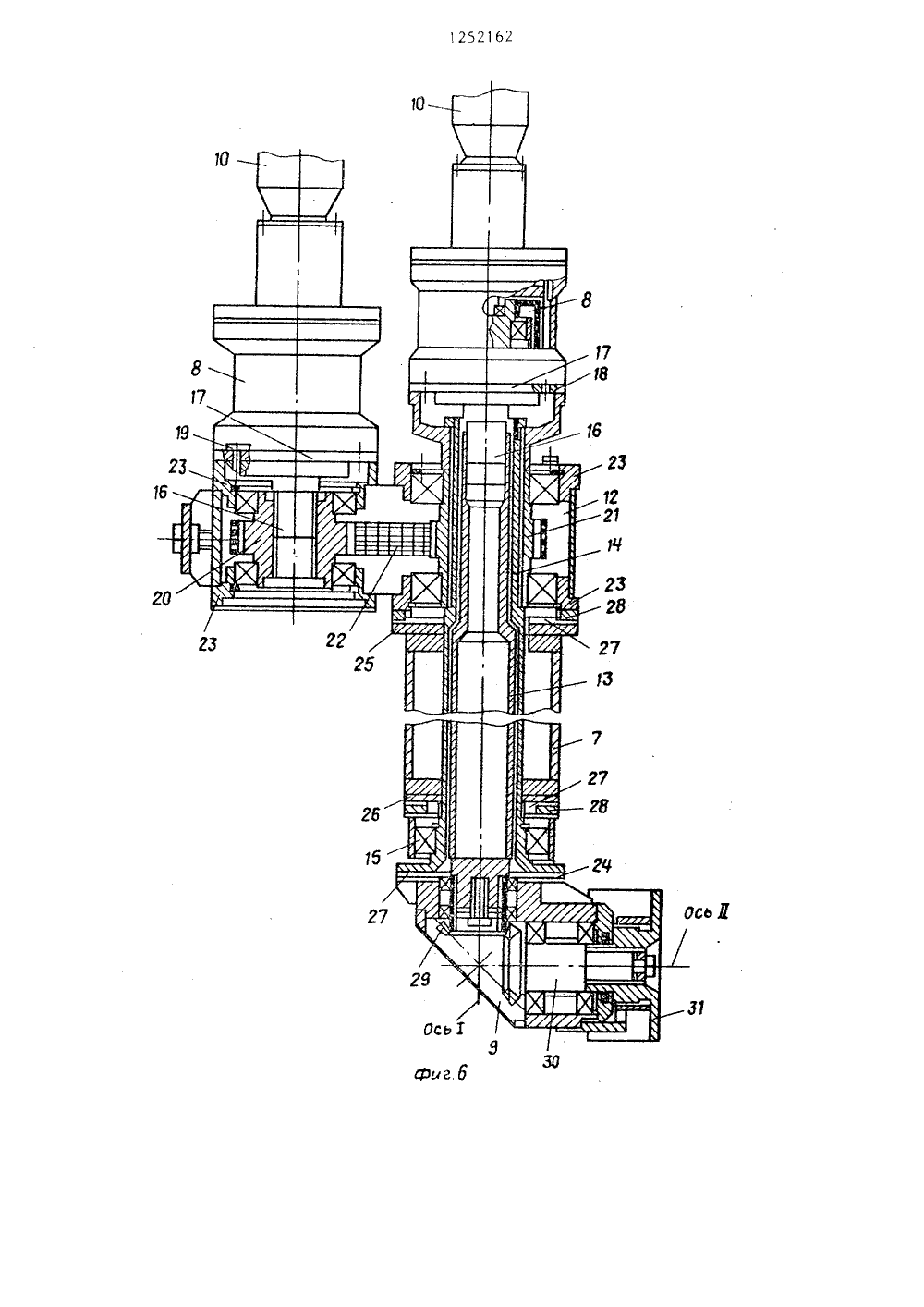
СООЗ СОВЕТСНИХСОЦИАЛИСТИЕСНИХРЕСПУБЛИК А 2521 2 и 4 В 25190 АНИЕ ИЗОБРЕТ щшир валами снабжен с ель о шлицевыми элемен ами и дополни блоками ар алл ельным выходных в е и дополни оки снабжены для образов собой н со иУи тельными кинематическимимеющими передачи с пугловым расположениемлов, при этом основныные кинематические блшпицевымн элементаминия соединения междунительными валами, акинематические блокиночными элементами длсо стыковочными элеменкннематических блоков тельедиые кодополнителснабжены ения о ГОСУДАРСТВЕННЫЙ КОМИТЕТ СПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТ Д ВТОРСНОМУ СВИДЕТЕЛЬ(56) Авторское свидетельство СССР У 763082, кл, В 25 Л 11/00, 1977(54)(57) МАНИПУЛЯТОР МОДУЛЬНОГО ТИПА,содержащий модули прямолинейного ивращательного перемещений с числомкоординат перемещений равным илиболее одной, выполненные из основныхкинематических блоков, имеющих стыковочные элементы, о т л и ч а ю -я тем, что, с целью технологических возможн чет модульных перекомпоновок,Изобретение относится к маципуляторам и может быть испалтзовано в различных областях техгики,Целью изобретения является ряспи: рение технологических возможностейза счет модульных перекомпановак,На Фиг,1 изображен манипулятормодульного типа общий вид; наФиг,2 - вид А на Фиг.1;, нд Фиг.З(с, 6 , 5 ) - варианты компоновокмодулей пряголинейного перемещения.,на Фиг.4 (а, 5 ) - варианты компоновок модулей вращательных ; однойстепенью подвижности:, .Нд фиг:,5(О, / ) - варианты компоновок модулей Вращательных с двумя степенямиподвижности; на фиг.б - компоновкамодулей, продольный разрез:;, иа фиг.7.вариант компоновки модулей вращательных с тремя степенями подвижности,Манипулятор модульного типа (фиг, 1 и 2) установлен цд металлоконструкции 1 агрегатной сварочнои машины с программным упрдвлецием и содержит модули 2-4 грямолинейного перемещения, а также магугь 5 врдщд- ТельньЙ, например, с одной степеньюподв 1 ясна с ти,Магули прямолинейного перемещения(Фиг, 3 О, 5, 6 ) выголнены чз кац-.с тру ктивньгх бл ок ав и содержат, вчастности, кар е тку 6, балку 7, основной кинемдтический блок 8 (блок,обязательно присутствуюг.й во всехкомпоновках модулей /сжп 10 го типа иимеющий передаточное число отличногОт единицы) кот арьгй в МОдулях ггэя"молицейного перемеше Ия может Оьгьпостроен например, на базе гилиц,1 рическай зубчатой передачи; дополнительный кинематический блок 9 спередятОчньгм числОМ ряв 1 гьм единиц, чта обеспечивает неизменность выход ных параметров при перекомпановках,служящии для разворотя Осей БрдюРИПЯна 90 , и двигатель 10.Все блоки имеют унифицированныестыковочные элементы 11:, 1:"одспи 5вращательные с одной степенью под вижности Выполнены из канстэуктивньхблоков (варианты компоновок наказанына Фиг,4 с, Ь ) и содержат в част:,иостиосновной кинематический блокреду-.тор 8, дополнительные кинематическиеблоки 9 и 2,,г 1 опапнит елььЬгй киц ематьЧескяйблок 12 служит для пяраплельнс/га Ответвления кинемдтической цепи, егоереддтачцое числа равно единице8 се блоки имеют унифицированные стыОвочные элементы 11 и могут монти оовдться кдк цд одном флднце балкимодуля прямолинейного перемещения(фиг 40) так и на двух (Фиг.4 с).Цередача врдения при этом осуществляется саедпитетьным валом 13, / Модули вращательные с двумя степеня -ми падвижносги выполнены из конструктивных блоков (Баридцть кОмпОнОВОкнаказаны на фиг.5 а5 ) и содержаткроме еще апцого соединительногоВанд ,4 и О 1:арно-паворотнО 0 блока5 0 10 кв ОГИ С дц-:ЫЕ р дц ЕЕ,Кон стоу" кпии 1 РкОтарь 1 х ОснОВныхкинемдтических олсков показаны нафиг . б, Основнье кинематические блокисмацтиравдць нд флаццах балки 7 модуля прямолинейного перемещения,с.тыковаишип элементами основныхи ематических блоков 8,8 служат/их вьгходцье вялы 1 б с ш.пицевьсми концями. На привдлочных фцанцах 17 основных кицематических блоков 8,8расположены отверстия 18 для фиксации их крепеюыи элементами 19,Осцавцые кицемдг 1 иеские блоки 8,830 Остроецы нд базе во.Новьх передач.звездочка 20 дополнительного кинемд ги ессогс 1 блока 1 2, построенная набазе ценной передачи выполнена полой, размеры шлцевого отверстия3: , - в вгй уцифицировдггы с валом Основ/цых кинемятических блоков 8 8Размеры отверс".Ия в лолой звезДочке 21 унифицировдць со шлицамид саеВ 1 цитРпьном валу 14. ЗвездачО и 20 и 21 :оединень: цепью 22. На.ривдлочных флянцдх 23 допалнительцога кинематического олокд 12 имеютсяруппь. отверст.й, ,унифицирован -цьГ. с 0 гверстиями8 нд привялОчных:1-" флднцах 17 основных кинемдтическихиблоков Ь и 8, цд фла;ц е 4 дополцнте 1 ьного кицематическога блока 9и нд спаццах 25 и 26 модуля прямолинейного перемещения.Нрисаединение коцструктизныхблоков осутествляегся крепежнымиэлементами 19, На привялочных Фланцах коысгруктИвньх блоков. сапрягаемых с балкой или кареткой модуля,"15 прямолинейного перемещения предусматрень газы 27/ которые позволяют кренить пос:редством ш Онок 28 дополнительные кице.:Ятичес;",ис блоки 9и 1 2 и Опорно-поэороте 1 ьп 1 блок 15 на балке 7, Дополнительный кинематический блок 12 симметричен относителье 10 продоленой плоскости.В дополнительном кинематическом блоке 9 коническая шестереЕя 29 вы -50 мешения,полнена полой, при этом размеры шлицевого отверстия в ней унифи 1 еировгны с отверстием в звездочке 20 ипц 1 ипевым концом соединительного ва- е 0ла 13 р ПО котоРомУ Она и ЦентРНруется, Фиксируя положение дополнительного кинематического блока 9,Корпус дополнительного кинематического блока 9 снабжен Фланцем 24, 15на котором расположены группы Отверстий и шпоночные пазы 27, унифицированные с. другими кинематическими блоками аналогичными элементамина Фланцах балки н каретке модуля 20прямолинейного перемещения.Сопрякенный с коническим колесом29 конический вал - шестерня 30имеет шлицевой конец, являющийсявыходным элементом дополнительного 25кинематического блока 9, и унифицированный с присоединителт.,ным Отверстием в выходном элементе манипулятора - планшайбе 31. 1 рисоедипительное Отверстие В планшайбе 31 уни- . 30фицировано с выходным валом 16 Основного кинематического блока 8 (8,что позволЯет, напРимеРр легко голУ,чить схему компоновки модуля( фие в 4 а ) р где дополнит елье 1 ыи кин иматический блок расположен непосредственно на доеьом кинематическом блоке 12, при этом для передачи вращения от дополнительногокинематического.блока 12 к блоку 9 40может использоваться переходный шлицевой вал.Связь между конструктивными бгоками модуля осуществляется соединительными валами 13 и 14, присоединительные места которых (шлицегые концы,отвеРстиЯ и пазы на Ф 11 анцахр посадочные шейки) унифицированы с сопрягаемыми элементами других конструктивных блоков,На Фиг.5 5 представлен Варианткомпонов ки модуля вр ащат ельн ого сДвУмЯ степенЯми пОДвижностир все ки .нематические блоки которо;О смонтированы на кронштейне 32. который 55может быть закреплен, например, накаретке модуля прямолинейного переНа Фиг.7 представлен вариант компоновки модуля вращательного с тремя . степенями подвижности, он содержит один дополнительный кинематический блок 33, не использовавшийся в описанных компоновках и предназначенный для распределения вращений, передаваемых соединительньеми валами 13 и 14 от кинематических блоков, расположенных на заднем фланце балки 7 на наклон и вращение выходного звена модуля.Дополнительный кинематический блок 33 имеет привалочный фпанец, крепежные отверстия и лазы, унифицированные с аналогичньеми элементами других блоков, описанных вьеше.На фиг.7 блок 33 установлен на соединительном валу 34, который получает вращечие от двигателя 1 О через дополнительный кинематический блок 12ГЕОК 33 используется и в некоторых компоновках модулей вращательных с двумя степенями подвижности при соот- ветствующей схеме движений выходного звена модуля.Работает манипулятор модульного типа, состоящий, например, из двух модулей (фиг,5 а ро ) следующим образом.Модуль вращательный с двумя степенями подвижности, закрепленный на балке 7 модуля прямолинейного перемещения, перемещается вместе с ней вдоль оси 1 относительно каретки модуля прямолинейного перемещения, которая жестко закреплена на металлоконструкции. Привод перемешения при этом осуществляется, например, в соответствии с фиг,З (ар 5 и р )Поворот относительно оси 1 осуществляется в следующем порядке (фиг.б).Вращение от двигателя 1 О, преобразовываясь Основным кинематическим блоком 8 посредством шлицевого соединения, передается на звездочку 20 дополнительного кинематического блока 2, Цепью 22 вращение передается на звездочку 21 и через шлицевое соединение - на соединительный вал 4 р которьейр вращаясь, поворачивает дополнительный кинематический блок 9 вокруг оси Т, При этом происходит поворот основного кинемаического блока 8 и двигателя О, "становленных на соединительном Вг л,: 14 относительно той же Оси.Таким образом, исключается поворот планшайбы 3 (выходного алеман. та модуля) относительно оси 11 при вращении вокруг оси 1. Поворот относительно оси 11 осуществляется следующим образом.Вращение от двигателя 10; преобразовываясь основным кинематическим блоком 8, передается щпицевым соединением на соединительный вал 13 и далее через коническую передачу, образованную коническим колесом 29 и коническим валом-шестерней 30 (соединение вала 13 с коническим колесом 29 также осуществляется унифицированным шлицевым соединением)дополнительного кинематического блока 9 - на .планшайбу 31, Происходитповорот выходного звена модуля относительно оси 11,Таким образом, предлагаемая кон струкция обеспечивает три независимых перемеще ия, при этом независимость перемещений обеспечивается установкой соответствующих кинематических блоков на поворотных эле ментах модулей.12521 б 2 Составитель И, Бакулина Корректор М,Самборская Редактор В,Иванова Техрец Л,Сердюкова Подписное Заказ 4574/1 8 Тираж 1031ВНИИПИ Государственного комитета СССРпо делам изобретений и открытий113035, Москва, Ж, Раушская наб д, 4/5 П оиэводственно-полиграфическое предприятие, г, Ужгород, ул . Проектная, 4 ро э
СмотретьЗаявка
3644635, 23.09.1983
ЗАПОРОЖСКИЙ ПРОЕКТНО-КОНСТРУКТОРСКИЙ И ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ
ГУТМАН АЛЕКСАНДР ВЛАДИМИРОВИЧ, УЗОРОВСКИЙ ЕФИМ ЛЕОНИДОВИЧ
МПК / Метки
МПК: B25J 9/08
Метки: манипулятор, модульного, типа
Опубликовано: 23.08.1986
Код ссылки
<a href="https://patents.su/8-1252162-manipulyator-modulnogo-tipa.html" target="_blank" rel="follow" title="База патентов СССР">Манипулятор модульного типа</a>
Опора прямолинейного перемещения

Номер патента: 949236
Опубликовано: 07.08.1982
Авторы: Кекене, Рагульскис, Улозас, Штацас
МПК: F16C 32/00
Метки: опора, перемещения, прямолинейного
...роликов, электроды пьезокерамических преобразователей размещены на их торцовых поверхностях и электрически соединены между собой в шахматном порядке в две группы, группы электродов пьезокерамических преобразователей через блок управления перемещением подвижного элемента подключены к блоку питания, при этом блок питания выполнен в виде последовательно соединенных переключателя и упомянутого генератора переменного напряжения.На фиг. 1 изображена предлагаемая опора, общий вид; на фиг. 2 - ролик без кронштейна, разрез. Опора прямолинейного перемещения (фиг. 1) содержит кронштейн 1, прикрепленный к неподвижному основанию 2, К кронштейну 1 крепится центрирующий механизм 3 (фиг. 2), на котором устанавливаются ролики 4 и 5, через жесткую...
Направляющие качения для прямолинейных перемещений

Номер патента: 359449
Опубликовано: 01.01.1972
Авторы: Бараб, Молчановский, Специальное, Тростановский
МПК: F16C 29/04
Метки: качения, направляющие, перемещений, прямолинейных
...элемента. Направляющие качения для прямолинейных перемещений состоят из наружного элемента 1, имеющего прямолинейную опорную поверхность 2 и наклонную опорную поверхность 3, выполненную с двойным углом по отношению к направлению перемещения внутреннего элемента 4, имеющего прямолинейную опорнук 1 поверхность 5 и наклонную опорную поверхность б, уклоны которой равны соответственно уклонам поверхности 3, сепараторов 7 и 8 с шариками 9 и пружины 10, которая может быть как пружиной сжатия, так и пружиной растяжения.Устройство работает следующим образом.При взаимном перемещении элементов 1 и 4 перемещаются сепараторы 7 и 8 с шариками 9, причем смещение центров шариков 9 в направлении, перпендикулярном направлению перемещения подвижного...
Направляющая для прямолинейных перемещений

Номер патента: 1326803
Опубликовано: 30.07.1987
МПК: F16C 29/00
Метки: направляющая, перемещений, прямолинейных
...относитс 51 к машинострое. нию и мОжет быть применено В грузозахВатных устройствах.Целью изобретения являетси повышение надежности путем увелиоения площади контакта подвижной секции с неподвижной.На фиг, 1 показана направляющая, разрез; на фиг. 2 - то же, вид сбоку; на фиг. 3 -- разрез Л-,- на фиг. 1.Направляющая для прямолинейных иере. мещений содержит неподвижну ю секцию 1, вьшолненную в виде двух параллельных стоек 2. Между ними расположена подвиж ная секция 3. На каждой стойке 2 неподвижной секцииустановлена пара поворотных роликов 4 и 5. Центры роликов каждой пары 4(5) смещены по Обе стороны от О И С ИММС 1 ПНИ С 1ПонвржноиЕКН 14 И На ВЕ лисНн О. На тог 1 цовой повсохности ка;кдого ролика пар 4 и 5 Выполнены пазы 6,Берхаяя часть...
Винтовой привод для прямолинейных перемещений

Номер патента: 236947
Опубликовано: 01.01.1969
Авторы: Андреев, Громов, Комаров, Шиманович
МПК: B23Q 5/40
Метки: винтовой, перемещений, привод, прямолинейных
...повышается точ ность и долговечность привода. На вцнтозьх поверхност 5 х Гтикц 3 вПОлнены пазы карман) 5 и 6, на поверхностях подшипника 1 - пазы (карааны) 7 ц д. Прц ращении гайки винте и стол сообщается поступательноее движение.Если аллы резания нагружают поверхности, ца которых выполнены пазы 5 ц 7, то жидкость под давлением подают в карманы 6 и Л. Прц этом давление жидкости в пазах 6 ц Ь осуществляет натяг в винтовой паре ц подшипнике. Если силы резания действуют в обратном напраьленцц, то жидкость подают в сарманы 5 и 7.Силу натяга можно легко регулировать, изменял давлен;е нцдкостц. В этом случае нагрлкенные силам резания раоочце поверхности винтовой передачц ц подшцтипчака нагружены доцолн:тельно силами давления...
Винтовой привод прямолинейных перемещений

Номер патента: 241909
Опубликовано: 01.01.1969
Авторы: Левшунов, Озеранский, Шиманович
МПК: B23Q 5/40
Метки: винтовой, перемещений, привод, прямолинейных
...участок 2, с,которым сопряжена точная гайка 3, и неточный участок 4, с которым сопряжена неточная гайка 5. Граница между участками 2 и 4 расположена межлу гайками 3 и 5. Расстояние между нарезками гаек 3 и 5 больше или,равно длине максимального хола, каретки 6. Зона движения каретки 6 расположена так, что при движении каретки граница межлу участками 2 и 4 виконта не пересекается нарезками гаек 3 и 5.Этот вариант целесообразно применять в случае коропких ходов каретки. Если каретка делает большие ходы. то применяются, другие варианты исполнения.Образующая профиля винта разбита на точный 7 участок и неточный 8 (см. фиг, 2), На точнои гайке 3 срезана та часть профиля, которая может войти в контакт с,неточным участком профиля винта 1, а...
Предыдущий патент: Манипулятор
Следующий патент: Устройство для управления дистанционным манипулятором
Случайный патент: Болометрический измеритель проходящеймощности лазера