Управляемый электропривод
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки








Текст
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСНРЕСПУБЛИК НИЯ ЗОБ П(21) (22) (46)72 физи ковс им.И (53) ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ К АВТОРСКОМ,К СВИДЕТЕЛЬСТ 3566551/24-0711.01.8307.03.85 вюл. В 9( ) А.С,Плеханов и А,А.Гаранин (71) Горьковский исследовательскийко-технический институт при Горьком государственном университете.Лобачевского62.83.621.333.072.9(088.8) (56) 1. Авторское свидетельство . СССР У 746079, кл. Н 02 Р 5/28, 1980.2. Авторское свидетельство СССР 11 851716, кл. Н 02 Р 7/42, 1981, (54)(57) УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД, содержащий синхронный двигатель, обмотки которого подключены к выходу многофазного регулируемого преобразователя, фазовращатель, сочлененный с валом двигателя, а многофазной обмоткой соедененный с многофазным источником синусоидального напряжения, фазосдвигающий блок, блок измерения разности Фаз, о т л и ч а ющ и й с я тем, что, с целью повыше-. ния точности поддержания мгновенной частоты вращения, в него дополнительно введены управляемый генератор импульсов, два формирователй импульсов, цифровые компараторы и постоянные запоминающие блоки по числу Фаэ регулируемого преобразователя, а фазосдвигающий блок составлен из сумматора, блока алгебраического суммирования, формирователя входных команд постоянных запоминающих блоков, трех делителей частоты, двух логических элементов И, формирователя опорного входного кода блока алгебраического суммирования, счетчика и ЯО 1144201(З 1) Н 02 Р 7/36 5/24 блока логических элементов И, при этом управляемый генератор импульсов выходом подключен к входу многофаэного источника синусоидального напряжения, два формирователя импульсов подключены входами соответственно к одной из фаз многофаэного источника синусондального напряжения и к выходной обмотке фазовращателя, выходы цифровых компараторов подключены к многофазному регулируемому преобразователю, первые входы цифровых компараторов соединены с выходами постоянных запоминающих блоков, входа ми соединенных с выходами формирователя входных команд постоянных запоминающих блоков, тактирующий вход по- рр следнего через первый делитель часто- ф ф ты и первый логический элемент И сое- С , динен с выходом управляемого генератора, сиихронизирующий вход формирователя входных команд постоянных запоминающих блоков соединен с выходом второго Формирователя. импульсов, а выходы предварительной установки Формирователя входных команд постоянных запоминающих блоков соединС- ны с выходами сумматора, одна входная шина которого соединена с выходами блока алгебраического суммирования, входами подключенного к вых дам счетчика и формирователя опорного входного кода блока алгебраического суммирования, тактирующие входы которых через второй и третий делители частоты соединены с выходом управляемого генератора импульсов, причем синхрониэирующий вход формирователя опорного входного кода блока алгебраического суммирова1144201 ния соединен через второй логический элемент И с выходом второгоформирователя импульсов, а входыпредварительной установки его соединены с выходами счетчика, с вторыми входами цифровых компараторов иодними из входов измерителя разности фаз, вторые входы которого соеди"иены с входами постоянных запоминающих блоков и входами блока логических элементов И, выходы которого Изобретение относится к электротехнике, а точнее к устройствамдля регулирования числа оборотов икрутящего момента электродвигателейпеременного тока путем регулирования 5тока статора, и может быть использовано для регулирования и стабилизациимгновенной скорости двигателей в прецезионных системах синхронных электроприводов приборов автоматического управления, телемеханики, измерительныхпреобразователей для исследованияфизико-механических свойств веществ.Известен управляемый электропривод, содержащий управляемый источник питания, выходом подключенныйк синхронному электродвигателю, последовательно соединенные датчик,механически связанный с электродвигателем, фильтр первой гармоники, 20фазовый детектор, фазовращатель,вход которого соединен с выходомуправляемого источника питания, авыход - с вторьж входом фазового детектора, причем выход последнего 25подключен к управляющему входу источника питания .Однако в схеме этого устройстваотсутствует опорный сигнал, относительно которого должна происходитьстабилизация скорости, т.е. Углового положения ротора, изменяющегосяво времени. Управление происходит поуглу нагрузки - углу между векторомполя статора (напряжением на стато- З 5ре двигателя) и вектором поля ротора. Таким образом, речь может идтине о стабилизации скорости ротора, а лищь о сглаживании его коле" соединены с второй . входной шинойсумматора, синхронизирующий входизмерителя разности фаз соединенс выходом второго формирователя импульсов, а выходы измерителя - с управляющими входами блока алгебраического суммирования, первого и второго логических элементов И и блокалогических элементов И, выход первого формирователя импульсов соединен с входом установки вкО "счетчика. баний. Статическая система регулирования по нагрузке не обеспечива- .ет стабилизации скорости при периодических изменениях момента нагрузки от нуля до номинального, что необходимо влечет за собой соответствующее изменение угла нагрузки от нуля до 9(2, а следовательно и мгновенной скорости ротора.Кроме того, указанное устройствоне обеспечивает регулирования положения вектора поля статора относительно положения ротора, т.е, максимального момента при пуске и торможении.Наиболее близким по техническойсущности к изобретению являетсяФуправляемый электропривод, содержащий синхронный двигатель, обмотки которого подключены к выходу многофазного регулируемого преобразователя, фазовращатель, сочлененныйс валом двигателя, а многофазной обмоткой соединенный с многофазным источником синусоидального напряжения,фазосдвигающий блок, вход которого соединен с выходом блока измерения разности фаз, входы которого связаныс фазовращателем и задающим генератором, при этом фазосдвигающий блоксоединен с управляющим входом преоб.разователя,Злектропривод обеспечивает работу двигателя в режиме бесколлекторного двигателя постоянного токаи аналогичные механические характеристики 2 .Однако данный электропривод дляповышения точности поддержания мгноТО венной скорости требует замкнутой системы с обратной связью по скорости двигателя, при реализации которой возникает проблема обеспечения устойчивости, К тому же, этот электропривод 5 имеет в своей структуре такие аналоговые блоки, как блок умножения, измеритель разности фаз регулирующиел фазосдвигающие элементы, фазовые выпрямители, которые как правило, не могут обеспечить точности большей 1.27, что обусловливает общую погрешность устройства управления ,4-87.Цель изобретения - повышение точности поддержания мгновенной частоты вращения.Поставленная цель достигается тем, что в управляемый электропривод, содержащий синхронный двигатель,об мотки которого подключены к выходу многофазного регулируемого преобразователя, фазовращатель, сочлененный с валом -двигателя, а.многофазной об-. моткой соединенный с многофазным ис точником синусоидального напряжения, фазосдвигающий блок, блок измерения разности фаз, дополнительно введены управляемый генератор импульсов, .дваформирователя импульсов, цифровые 30 компараторы и постоянные запоминающие, блоки по числу фаз регулируемого преобразователя, а фазосдвигающий блок составлен из сумматора, блока алгебраического суммирования, формирователя входных команд постоянных запоминающих блоков, трех делителей частоты, двух логических элементов И, формирователя опорного входного кода блока алгебраического суммирования, щ счетчика и блока логических элементов И, при этом управляемый генератор импульсов выходом подключен к входу многофазного источника синусоидального напряжения, два 45 формирователя импульсов подключены входами соответственно к одной из фаз многофазного источника синусоидального напряжения и к выходной обмотке фазовращателя, выходы цифро О вых компараторов подключены к многофазному регулируемому преобразователю, первые входы цифровых компараторов соединены с выходами постоянных запоминающих блоков, входами 55соединенных с выходамиформирователя входных команд постоянных запоминающих блоков, тактирующий вход последнего через первый делитель частоты и первый логический элемент И соединен с,выходом управляемого генератора, синхронизирующий вход формирователя входных команд постоянных за. поминаюЩих блоков соединен с выхо" дом второго формирователя импульсов, а входы предварительной установки формирователя входных команд постоянных запоминающих блоков соединены с выходами сумматора, одна входная шина которого соединена с выходами блока алгебраического суммирования, входами подключенного к выходам счетчика и формирователя опорно" го входного кода блока алгебраического суммирования, тактирующие входы которых через второй и третий делители частоты соединены с выходом управляемого генератора импульсов причем синхронизирующий вход формирователя опорного входного кода блока алгебраического суммирования соединен через второй логический элемент И с выходом второго формирователя импульсов, а входы предваритель. ной установки его соединены с выходами счетчика, с вторыми входами цифровых компараторов и одними из входов измерителя разности фаз, вторые входы .которого соединены с вхо" Дами постоянных запоминающих блоков и входами блока логических элемеятов И, выходы которого соединены с второй входной шиной сумматора, синхронизирующий вход измерителя разности фаз соединен с выходом вто-, рого формирователя импульсов, а выходы измерителя - с управляющими входами блока алгебраического суммирования, первого н второго логических элементов И и блока логических элементов И, выход первого формирователя импульсов соединен с входом установки в "О" счетчика.На фиг.1 дана структурная схема управляемого электропривода 1 на фиг.2 - диаграммы работы устройства.управляемый электропривод содержит синхронный двигатель 1., обмотки которого подключены к выходу мио-, гофазного регулируемого преобразователя 2, фазовращатель 3, сочлененный с валом двигателя, а многофаз" ной обмоткой соединенный с многофаэным источником 4 синусоидального напряжения, фазосдвигающий блок 5, 1144201блок 6 измерения разности Фаз. Дополнительно имеется управляемый генера тор 7 импульсов, два формирователя 8 и 9 импульсов, цифровые компараторы 10 и постоянные запоминающие бло ки 11 по числу фаэ регулируемого преобразователя, Фазосдвигающий блок составлен из сумматора 12 блока 13 алгебраического суммирования, Формирователя 14 входных команд постоян О ных запоминающих блоков, трех делителей 15-17 частоты, двух логических , элементов И 18 и 19, формирователя 20 опорного входного кода блока алгебраического суммирования, счетчика 21 и блока 22 логических элементов И,Управляемый генератор 7 импульсов выходом подключен к входу много Фазного источника 4 синусоицального напряжения, два формирователя 8 и 9 импульсов подключены входами соответственно к одной из Фаз многофазного источника 4 синусоидального25 напряжения и к выходной обмотке фазовращателя 3, выходы цифровых компаратором 10 подключены к многофазному регулируемому преобразователю 2, первые входы цифровых компараторов 10 связаны с выходами постоянных ЗО запоминающих блоков 11, входами соединяющих с выходами формирователя 14 входных команд постоянных запоминающих блоков, тактирующий вход Формирователя 14 входных команд постоянных 35 запоминающих блоков через первый делитель 15 частоты и первый логический элемент И 18 связан с выходом управляемого генератора 7, синхронизирующяй вход формирователя 14 46 входных команд постоянных запоминаю-.щих блоков соединен с выходом второго формирователя 9 импульсов, а входы предварительной установки Формирователя 44 входных команд постоянных запоминающих блоков соединены с выходами сумматора 12, одна входная шина которога связана с выходами блока 13 алгебраического суммирования, входами подключенного к выходам счетчика 21 50 и формирователя 20 опорного входного кода блока алгебраического суммирования, тактирующие входы счетчика 21 и формирователя 20 отрного входного кода блока алгебраического суммиро- Я вания через второй 16 и третий 17 делигеля частоты связаны с выходом управляемого генератора 7 импульсов,причем, синхронизирующий вход Формирователя 20 соединен через второйлогический элемент И 19 с выходомвторого формирователя 9 импульсов,а входы предварительной установкиформирователя 20 опорного входногокода блока алгебраического суммирования соединены с выходами счетчика 21, с вторыми входами цифровыхкомпараторов 10 и одними иэ входовизмерителя б разности Фаз вторыевходы которого соединены с входамипостоянных запоминающих блоков 11и входами блока 22 логических элементов И, выходы которого связаныс второй входной шиной сумматора 12,синхронизирующий вход измерителяразности Фаз б соединен с выходомвторого формирователя 9 импульсов,а выходы измерителя 6 - с управляющими входами блока 13 алгебраического суммирования, первого 18 ивторого 19 логических элементов Ии блока 22 логических элементов И,выход первого Формирователя 8 импульсов соединен с входом установки в "0" счетчика 21,Устройство работает следующимобразом.Управляющий генератор 7 вырабаты-, вает импульсы, имеющие частоту, пропорциональнув коду 1 а на управляющих входах 23 генератора 7, Импульсы поступают на вход многофазного источника 4 синусоидальнога напряжения, питающего многофазныйФазовращатель 3, и йа вход Фазосдвигавщего блока 5, синхронизированного импульсами 24 и 25 (фиг,2) соответственно с Формирователей 8 и 9 коротких импульсов, генерирующих сигналы в моменты перехода входных напряжений формирователей 8 и 9 через нулевые значения. Фазосдвигающий блок 5 производит интегрирование заданной частоты посредством последовательного счета импульсов с выхода управляемого генератора 7, последующую обработку результатов интегрирования .и выходных кодов с измерителя 6 разности фаз,. определяющего угол нагрузки синхронного двигателя за период между импульсами 25, в итоге чего на выходе фазосдвигающего блока 5 формируется эквивалент Фазы вектора .магнитного поля статора двигателя - код 26 (Фиг.2), изменяющийся во времени и Формирующий вход11Очевидно, что переходные процессы в электроприводе под воздействием максимального пускового или тормозного моментов будут оптимальными по быстродействию. Устойчивость системы в свою очередь,обеспечивается тем, что угол между векторами магнитных полей ротора и статора .не превьппает допус 12 тимаго диапазона синхронизации -, 82,(Ч/дТаким оразом, предлагаемое устройство позволяет повысить точностьпоцдержания скорости электропривода,обеспечить его устойчивость, оптимальные по быстродействию пускотормозные режимы и представить в цифровом виде угол нагрузки синхронногодвигателя,
СмотретьЗаявка
3566551, 11.01.1983
ГОРЬКОВСКИЙ ИССЛЕДОВАТЕЛЬСКИЙ ФИЗИКО-ТЕХНИЧЕСКИЙ ИНСТИТУТ ПРИ ГОРЬКОВСКОМ ГОСУДАРСТВЕННОМ УНИВЕРСИТЕТЕ ИМ. Н. И. ЛОБАЧЕВСКОГО
ПЛЕХОВ АЛЕКСАНДР СЕРГЕЕВИЧ, ГАРАНИН АНДРЕЙ АЛЕКСЕЕВИЧ
МПК / Метки
Метки: управляемый, электропривод
Опубликовано: 07.03.1985
Код ссылки
<a href="https://patents.su/8-1144201-upravlyaemyjj-ehlektroprivod.html" target="_blank" rel="follow" title="База патентов СССР">Управляемый электропривод</a>
Постоянное запоминающее устройство

Номер патента: 752481
Опубликовано: 30.07.1980
Автор: Муртазин
МПК: G11C 17/00
Метки: запоминающее, постоянное
...которых через диоды 11 соединены с Р/д выходами дешифратор а 1 ( 11 - информационная емкость устройства). Другие концы шин 8 соединены с входами и групп по О ключей 12 в каждой группе. Выходы ключей подключены к шине 13 нулевого потенциала.Устройство также содержит т групп по д логических элементов И 14, установленных между управляющими входами 15 ключей 12 и выходами 16 дешифратора 2, Другие входы каждой из групп элементов И 14 подключены к соответствующим выходам распределителя 17 импульсов, подключенного основным выходом 18 к стробирующему входу дешифратора 2, вход распределителя 17 соединен со стробирующим входом дешифратора 1 числовых шин.Запись информации в устройство осуществляется установкой перемычек 19 на информационных...
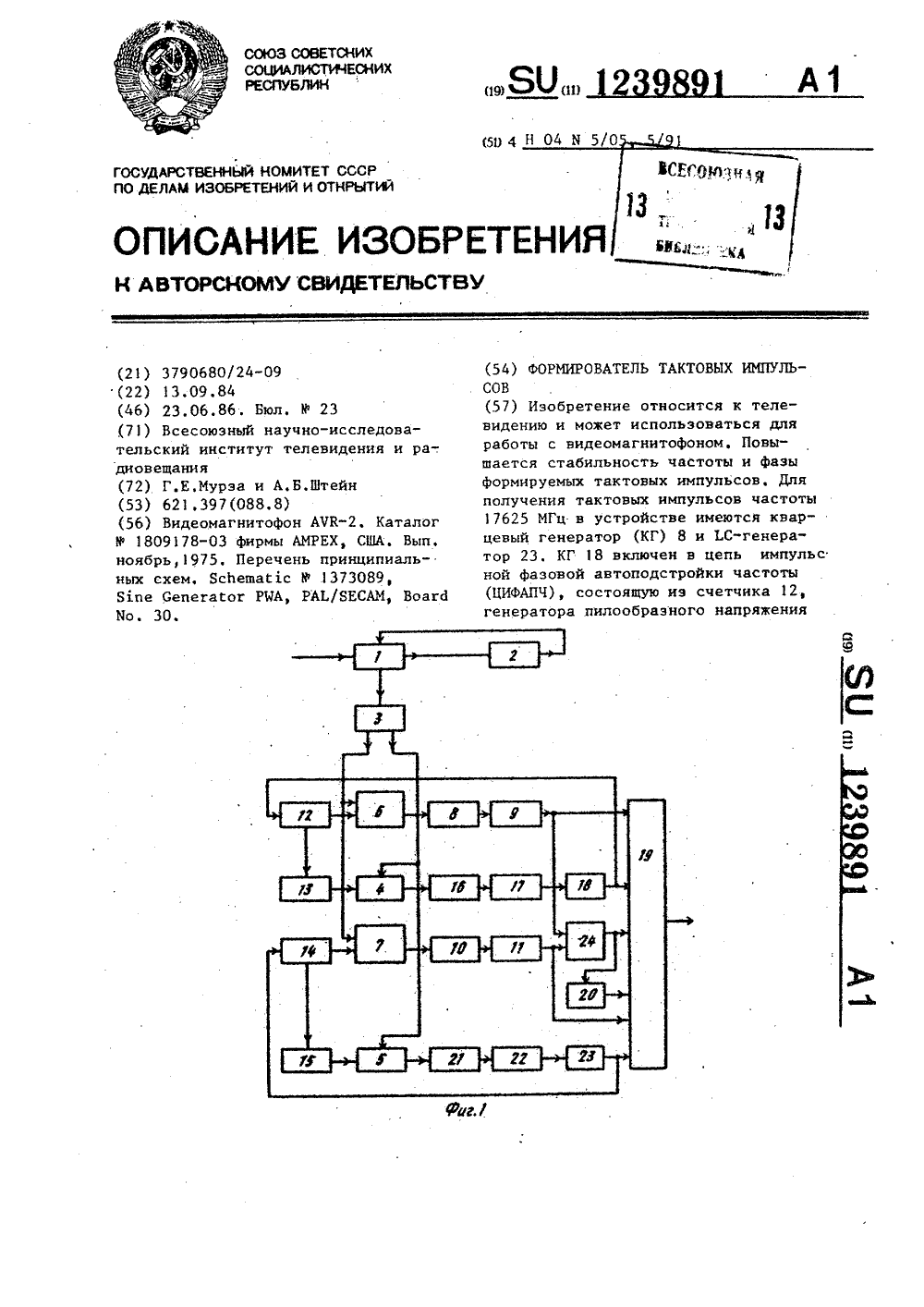
Формирователь тактовых импульсов
Номер патента: 1239891
Опубликовано: 23.06.1986
Метки: импульсов, тактовых, формирователь
...осуществляется коммутация опорных источников тактовых импульсов формирователя тактовых импульсов. в зависимости от стабильности частоты источника входного ви-деосигнала, Блоком 6 регистрации захвата кварцевого генератора, выполненным на триггере 25 (фиг. 2), производится обнаружение захвата в цепи ИФАПЧ путем считывания импульсами первого счетчика 12, поступающими на С-вход триггера 25, входных импульсов, поступающих на В-вход триг 12398911 О 15 20 гера 25 с выхода формирователя 3строчных импульсов,С выходов триггера 25 блока 6 регистрации захвата кварцевого генератора управляющие сигналы в виде постоянных напряжений поступают на первый интегратор 8, выполненный на резисторах 26 и 27 и конденсаторах 28и 29 и обеспечивающий плавное...
Устройство для программирования постоянных запоминающих устройств

Номер патента: 1372354
Опубликовано: 07.02.1988
МПК: G11C 7/00
Метки: запоминающих, постоянных, программирования, устройств
...запускает генератор на элементах 2 И-НЕ 28 и 29, Тактовые импульсы инвертируются элементом НЕ 21 и поступают на вход триггера 24, повторно инвертируются элементом НЕ 22 и поступают на вход триггера 24, включенного как делитель на два,С выхода триггера 24 тактовые импульсы, пройдя через элемент НЕ 23 и элемент 2 И-Е 26 (схема блокировки) поступают на счетный вход счетчика 17, Триггер 24 разрешает прохождение такта через схему блокировки, если соответствующая последовательности опроса кнопка 20 коммутационного поля (блок 9) не нажата. При этом с выхода элемента 8 И-НЕ 19 на информационный вход триггера 24 поступает сигнал, соответствующий уровню логического 0. Счетчик 17 при поступлении очередного такта инкрементирует. При этом на...
Авторегулируемый формирователь напряжения записи для электрически программируемых постоянных запоминающих устройств на кмоп-транзисторах

Номер патента: 1631606
Опубликовано: 28.02.1991
Авторы: Груданов, Сидоренко, Хоружий
МПК: G11C 17/00, G11C 7/00
Метки: авторегулируемый, записи, запоминающих, кмоп-транзисторах, постоянных, программируемых, устройств, формирователь, электрически
...5 модуляции стокового напряжения записи уменьшается до величины, при которой через транзистор 5 на сток транзистора 8 с плавающим затвором передается напряжение, равное напрякению лавинного пробоя р-и-перехода стоковой области, Одновременно напряжение с коллектора транзистора 11 подается на шину 14 выходного сигнала, которая соединена с затвором соответствующих ключевых транзисторов (идентичных транзистору модуляции стокового напряжения записи), которые обеспечивают передачу через последующие цепи дешифрации столбцовых шин на сток выбранных ячеек памяти накопителя напряжения записи, равного по величине напряжению, воздействующему на сток транзистора 8 с плавающим затвором. Таким образом, стоковое напряжение записи ячеек памяти...
Постоянное запоминающее устройство

Номер патента: 581508
Опубликовано: 25.11.1977
Авторы: Селигей, Тростянецкий
МПК: G11C 17/00
Метки: запоминающее, постоянное
...чертеже дана принципиальная схема ПЗУ.там ИЛИ 12, количество которых равно числу разрялов и. Выхолы элементов ИЛИ 12 соединены со вторыми вхолами 3 блока 5 выдачи информации. Блок 5 выдачи информации содержит п пар входов 4 и 13.В кажлой числовой марице 2 информация представлена поразрядно в прямом или обратном коде в зависимости от того, преобладают ли в данном разряде нули или единицы соответственно. Пусть в числовой матрице 2 с номером 1 в первом, втором и пятом разрядах количество нулей больше количества единиц, а в остальных разрядах, наоборот, преобладают единицы. Тогда в матрице 2 в первом, втором и пятом разрядах информация занесена в прямом коле, а в остальных разрядах - в обратном коде, В числовой матрице 2 с номером,...
Предыдущий патент: Радиоэлектронный блок
Следующий патент: Дождевальная система
Случайный патент: Опора скольжения смешанного трения